Об улучшении работы системы сигнализации отклонений технологических параметров на энергоблоках, реализованной на информационно-вычислительной машине ИВ-500
На энергоблоках, оснащенных информационно-вычислительными машинами ИВ-500, функции сигнализации отклонения технологических параметров возложены на машину. Такое решение дает возможность создать объемную, сравнительно быстродействующую и точную систему сигнализации, позволяющую автоматически регистрировать факт и время отклонения параметра и его возврата к нормальному значению.
Однако реализация системы сигнализации на базе цифровой вычислительной машины имеет ряд особенностей, отличающих ее от сигнализации на аналогичных приборах.
Во-первых, моменты измерения параметра и сравнения его значения с уставками разнесены по времени (примерно на 10 мс). Второй особенностью является то, что машина измеряет и сравнивает с уставками мгновенные значения контролируемого параметра. В связи с этим на результаты измерения и сравнения по машинному каналу оказывают влияние факторы (корреляционное поле изменения параметра, промышленные помехи и пр.), на многие из которых штатные контрольно-измерительные приборы не реагируют из-за своей инерционности.
Эти особенности канала цифрового измерения и сравнения не позволяют приближать значение уставки к номинальному значению параметра менее чем на удвоенное значение основной погрешности (одна часть — погрешность за счет точности измерения, другая — за счет рассогласования и нестабильности). На современных энергоблоках, где требования к поддержанию параметров по соображениям надежности и экономичности работы оборудования высоки, такое задание уставок не всегда удовлетворяет требованиям эксплуатации.
Другой не менее важной причиной неэффективного использования сигнализации является ухудшенная точность срабатывания из-за некачественного выполнения наладочных работ или из-за нарушения графика и объемов профилактических работ. При выполнении наладочных или профилактических работ требуется особое внимание уделять увеличению надежности, точности и стабильности работы машины, уменьшению значения рассогласования.
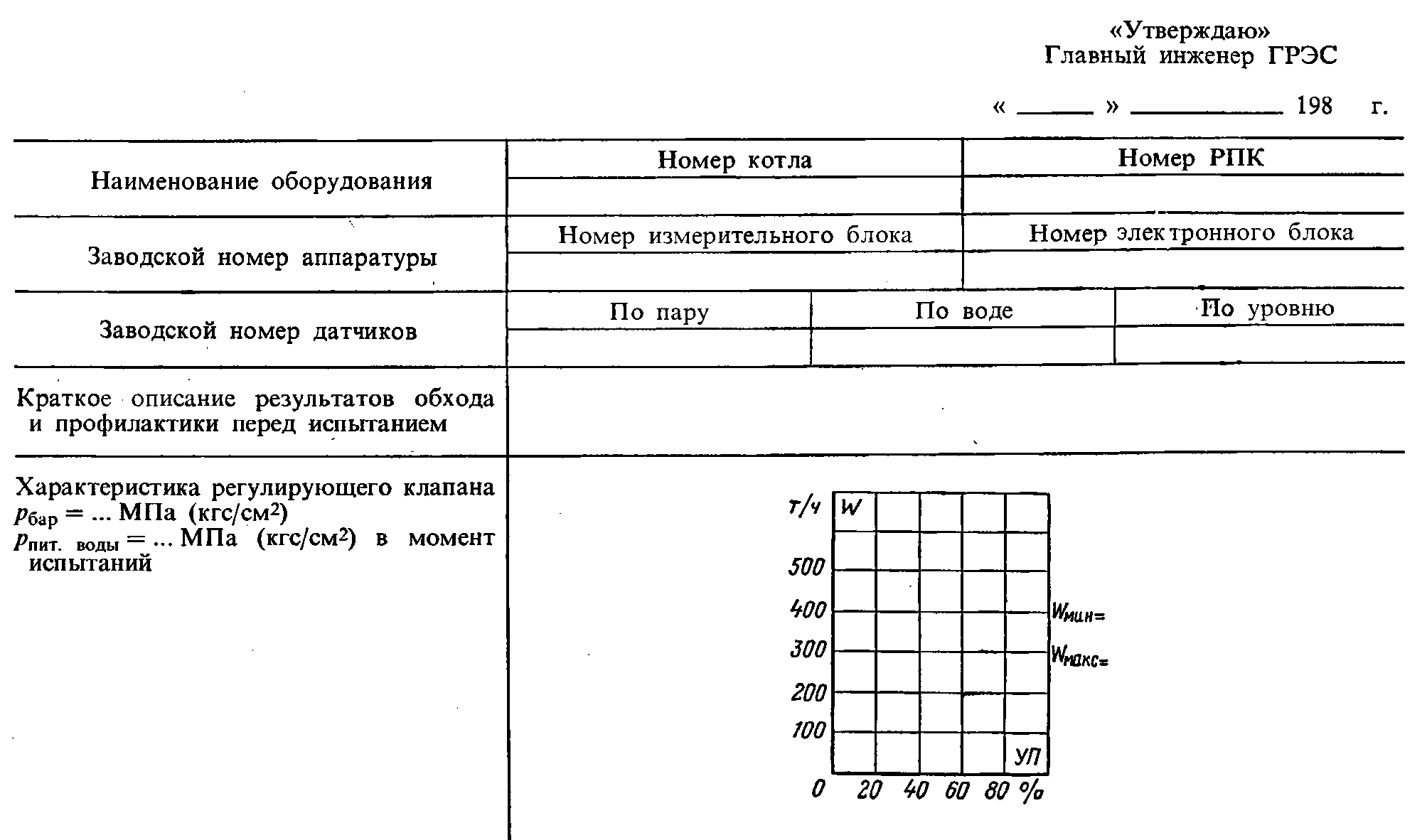
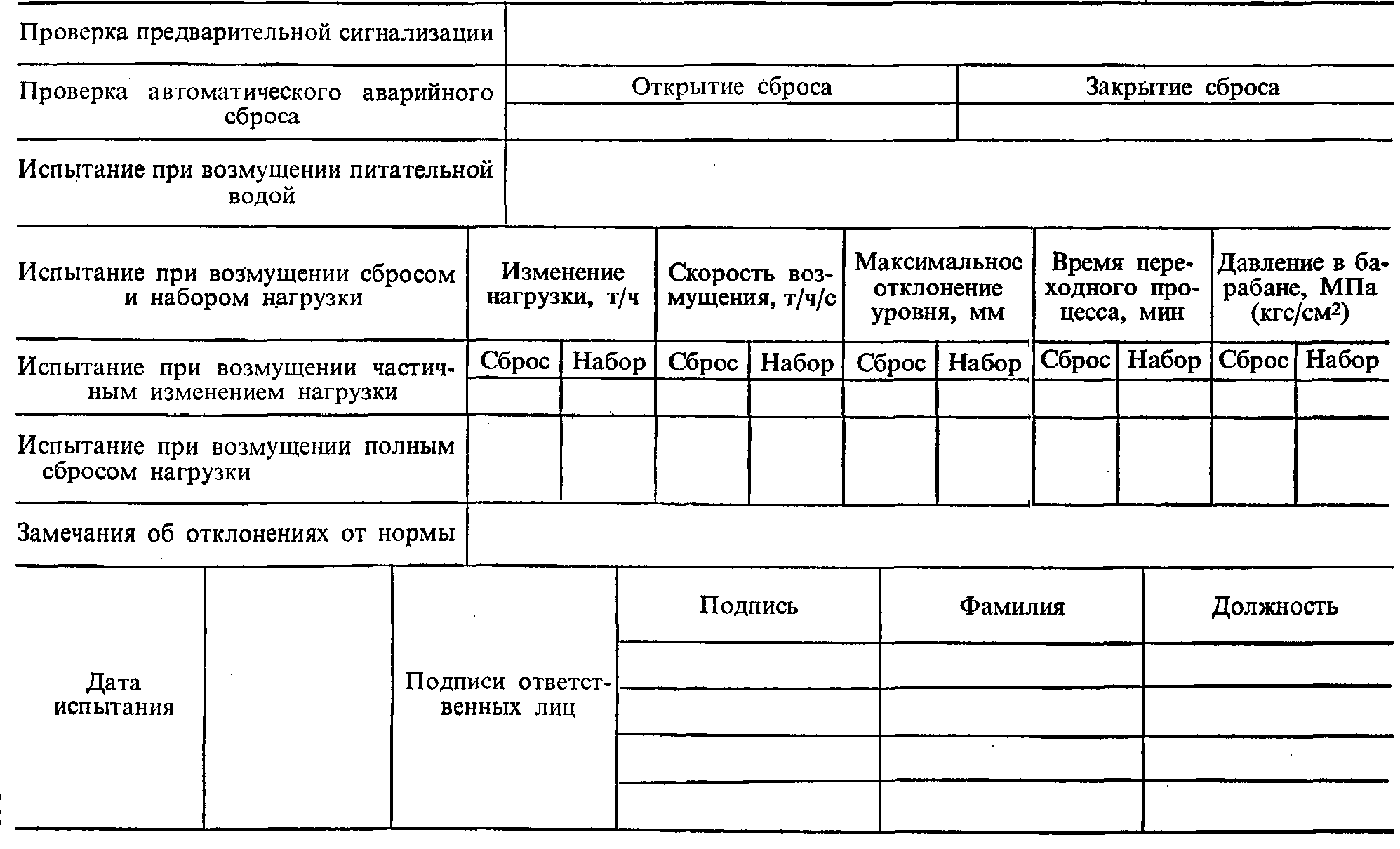
Протокол испытаний регулятора питания
Таблица 6.2
К причинам, ухудшающим перечисленные показатели, можно отнести:
дребезжание контактов реле;
увеличение пульсации выходного сигнала блоков нормализации (БН);
пульсации выходного напряжения источника стабилизированного питания ИПС-148 в УУП;
увеличение постоянной времени ЕН; неудовлетворительное качество работы модулей К; обратный ток коллектора масштабных ключей АЦП; низкая надежность работы устройств регистрации отклонений; промышленные помехи, ухудшенные условия эксплуатации.
Для успешной работы системы сигнализации и машины в целом необходимо выполнение следующих мероприятий.
1. СОЗДАНИЕ СИСТЕМЫ ПРИНУДИТЕЛЬНОЙ ВЕНТИЛЯЦИИ УСТРОЙСТВ МАШИНЫ
Точность и надежность системы сигнализации в значительной степени зависят от температуры окружающего воздуха.
Как показывает опыт эксплуатации, работа при окружающей температуре 30 °С и выше приводит к увеличению количества сбоев.
Предлагается внедрить систему принудительной вентиляции, в которой воздух центробежным насосом через брезентовый компенсатор подается в устройство машины.
Охлаждение или подогрев воздуха производится в калорифере, на входе которого необходимо установить масляный фильтр. Для контроля и сигнализации отклонений температуры внутри устройств необходимо установить термометр сопротивления ТСМ градуировки 23 с пределами измерения 0— 50°С, подключить его на вход ИВ-500 и выставить уставки сигнализации (Пр Ма — 20 °С, Пр Мн — 25 °С). Сигнал об отклонениях температуры необходимо вывести на панель центральной сигнализации.
2. СОЗДАНИЕ ИНДИВИДУАЛЬНОГО КОНТУРА ЗАЗЕМЛЕНИЯ МАШИНЫ
Помехи в цепях первичного питания являются одной из причин возникновения в устройствах машин сбоев, разрушения информации.
Рекомендуется создать контур заземления машины при обязательном выполнении следующих условий:
цепи заземления должны выполняться в соответствии с гл. 1—7 «Правил устройств электроустановок» («Энергия», 1966);
для уменьшения индуктивности контура заземления необходимо применять медный проводник прямоугольного сечения площадью не менее 40 — 50 мм2;
цепи заземления следует соединять методом сварки (пайки) или надежным болтовым соединением;
подключение к общестанционному контуру заземления необходимо осуществить в одной точке.
ВНЕДРЕНИЕ СХЕМ, ПОВЫШАЮЩИХ ТОЧНОСТЬ, НАДЕЖНОСТЬ И СТАБИЛЬНОСТЬ РАБОТЫ СИСТЕМ СИГНАЛИЗАЦИИ
- Изменение схем включения нуль-индикатора (НИ)
Погрешность, вносимая нечувствительностью НИ, приводит к преждевременному срабатыванию сигнализации, когда значение параметра не достигло еще значения уставки.
![]()
Увеличение обратного тока ключей масштабных декад АЦП приводит к появлению погрешности того же знака.
Целесообразно погрешности, вносимые нечувствительностью НИ и обратным током ключей, направить встречно. Для этого достаточно поменять местами «Вход 1» и «Вход 2», «Выход 1» и «Выход 2» НИ (рис. 6.3).
- Отбраковка реле в ячейках коммутации

Рис. 6.3. Изменение схемы включения нуль-индикатора (НИ).
Рис. 6.4. Схема проверки работы реле в ячейках коммутации.
На точность и стабильность работы канала цифрового измерения и сравнения влияет дребезжание контактов реле в ячейках коммутации. Обнаружить этот дефект сложно, так как на заводских стендах проверка реле осуществляется в статическом режиме.
Приведенная на рис. 6.4 схема проверки дает возможность сравнительно просто и быстро на работающей машине произвести отбраковку реле. Одновременно она позволяет проконтролировать уровень и форму сигналов от датчиков после устройств коммутации (УК). Указанную проверку необходимо осуществлять для всех реле в УК не реже 1 раза в год.
- Уменьшение постоянной времени модуля К
На рис. 6.S приведены изменения в схеме модуля К, позволяющие уменьшить постоянную времени и, следовательно, увеличить точность измерения и сравнения.
Еще большего эффекта можно добиться, изменив схему управления коммутатором II ступени, отключая модули К тактом Т — конец измерения (рис. 6.6). Это позволит -существенно уменьшить влияние предыдущей точки на последующую, обеспечить точную работу системы сигнализации по первой уставке.
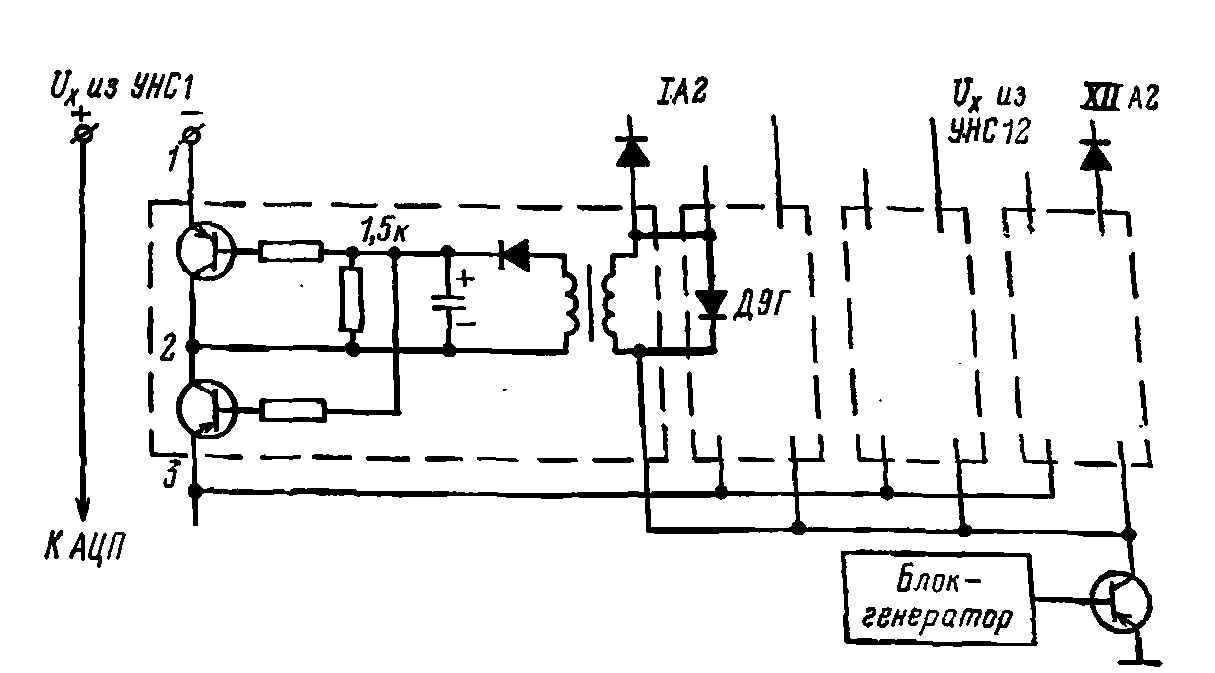
Рис. 6.5. Схема модуля К.
Примечание. Дополнительные элементы выделены жирными линиями.
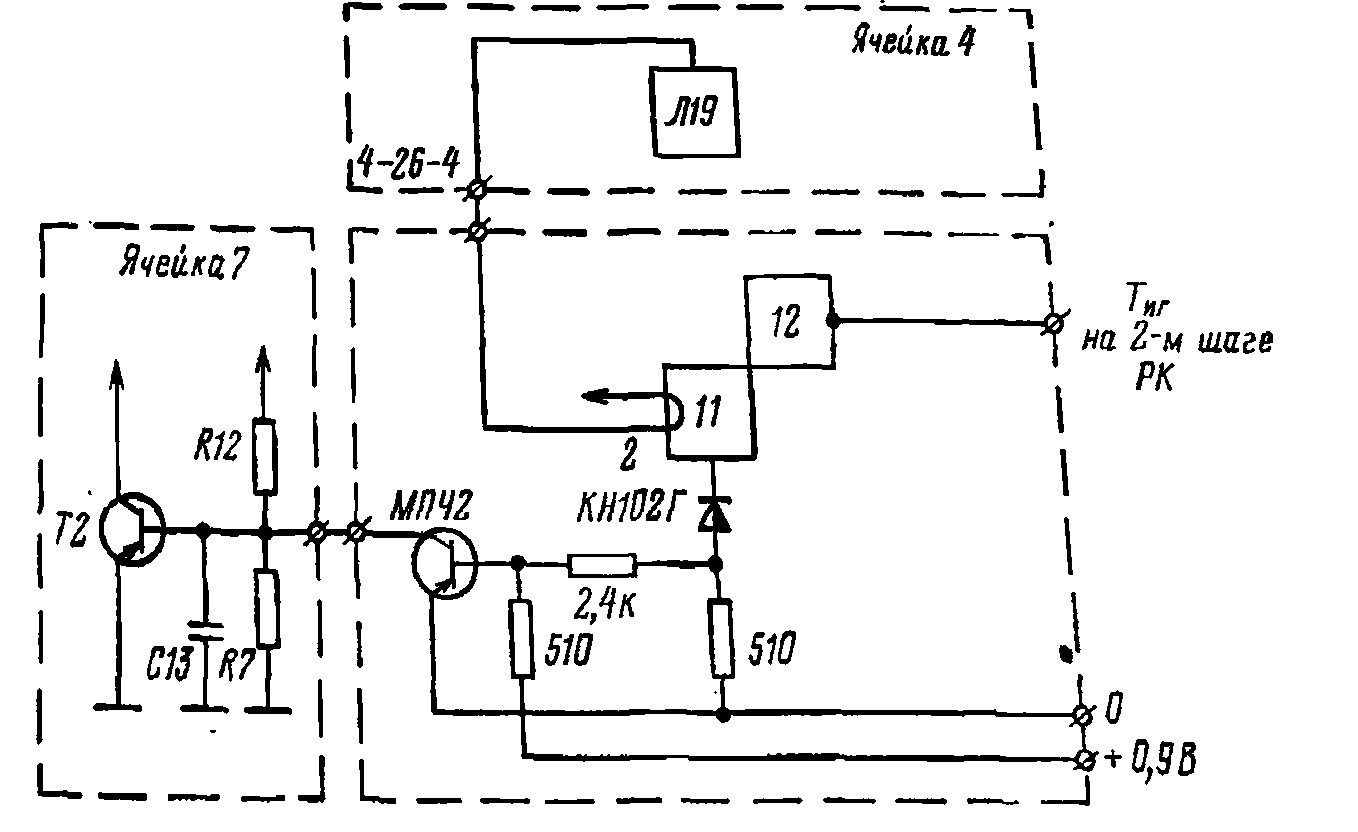
Рис. 6.6. Изменения в схеме управления коммутатором 2 ступени.
3.4. Замена источника стабилизированного питания в УУП
Для увеличения стабильности работы АЦП рекомендуется заменить в УУП источники стабилизированного питания ИПС-148 более мощными ИПС-202, Это позволит уменьшить изменение опорного напряжения в момент подключения БИС, улучшить точность работы системы сигнализации.
3.5. Изменение схемы канала цифрового измерения для датчиков
давления.
Основную погрешность канала измерения давления составляет погрешность блока нормализации (1,5%). Эту погрешность можно уменьшить почти в 2 раза, изменив схему канала. Для этого необходимо напряжение сигнала 10 В с выхода БН2-02 подать на коммутатор II ступени, исключив БН1 — 01 (используются только выходные цепи БН1 — 01).
Одновременно с этим рекомендуется разделить групповые выходы устройств коммутации по постоянному и переменному Току и исключить реле, переключающие сигналы низкого уровня на входах блоков нормализации.
Это приведет к увеличению надежности каналов, во-первых, за счет уменьшения количества контактов в измерительной цепи и, во- вторых, за счет частичного устранения влияния неисправного канала на работоспособность другого.
Указанные измерения приведены на рис. 6.7 и 6.8.
3.6. Автоматическое отключение зоны блокировки сигнализации
По диаграмме УРО можно оценить качество работы оперативного персонала. Однако имеющаяся зона блокировки сигнализации наряду с удобствами создает и некоторую неопределенность в определении состояния параметра.
При выходе параметра за пределы уставки сигнализации па диаграмме УРО печатаются адрес параметра, его значение и время отклонения. Оператор принимает меры и изменяет значение параметра, вводя его в зону допустимых значений. Тем не менее, если новое значение параметра окажется в зоне действия блокировки сигнализации, сигнал не снимается и УРО не зафиксирует факт возврата. Это вносит существенную ошибку в определение времени нахождения параметра за пределами допустимых значений и, следовательно, в анализе качества работы оперативного персонала. Для устранения указанной неопределенности необходимо реализовать схему (рис. 6.9), которая автоматически по временному сигналу от блока времени отключает 1 раз в 5 мин зону блокировки на цикл оббегания.
3.7. Контроль каналов формирования уставок сигнализации
Причину ложной работы сигнализации из-за дефектов в каналах формирования уставок трудно обнаружить, особенно при случайных сбоях.
Приведенная на рис. 6.10 схема позволяет осуществить автоматический тестовый контроль формирования уставок с выдачей сигнала неисправности.
Контроль осуществляется в каждом цикле работы машины по всем четырем уставкам.
3.8. Разделение запуска светозвуковой сигнализации и УРО
На рис. 6.11 приведена схема, позволяющая осуществить запуск светозвуковой сигнализации от предупредительных уставок, а УРО - от аварийных.
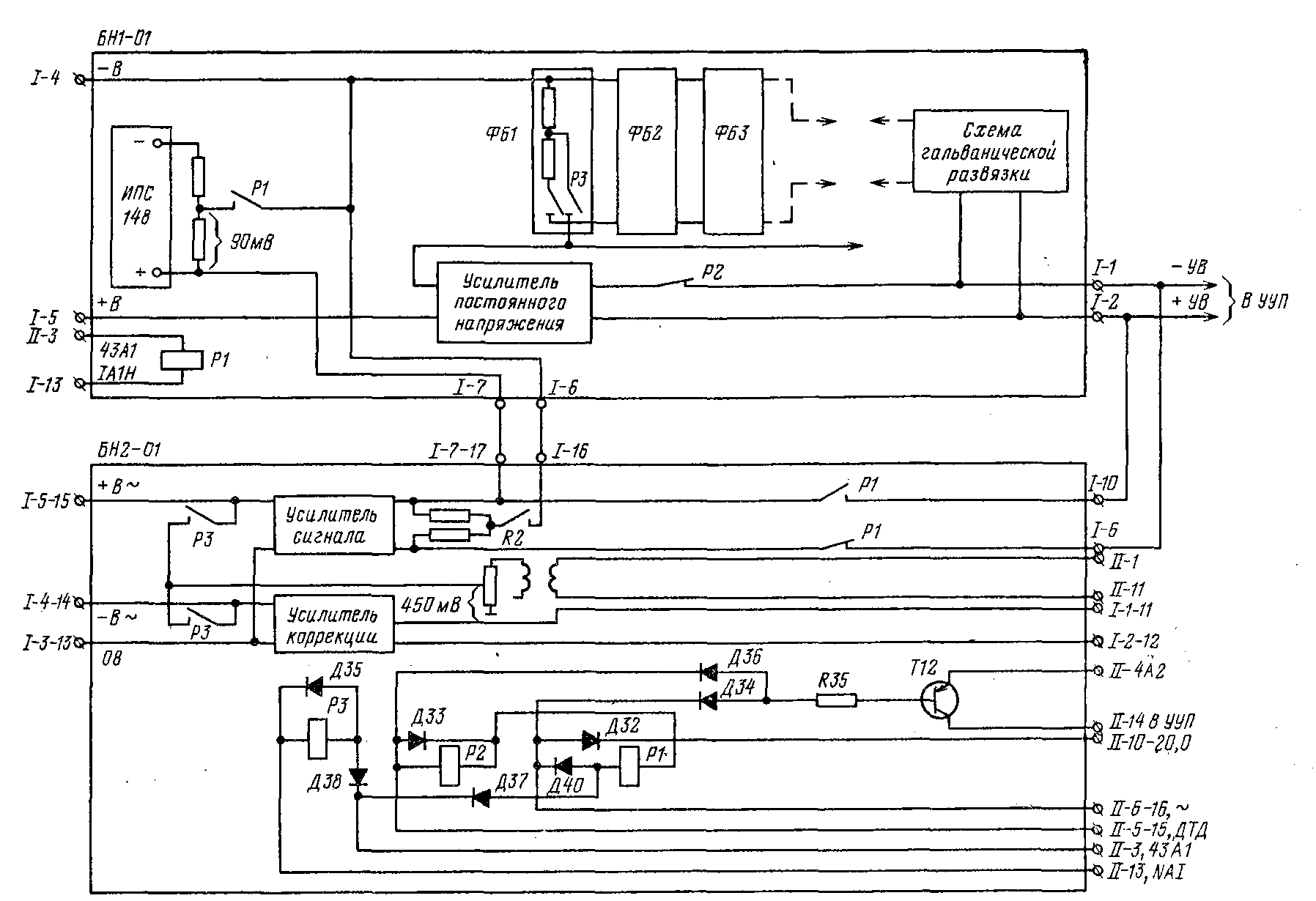
Рис. 6.7. Функциональная схема блоков нормализации.
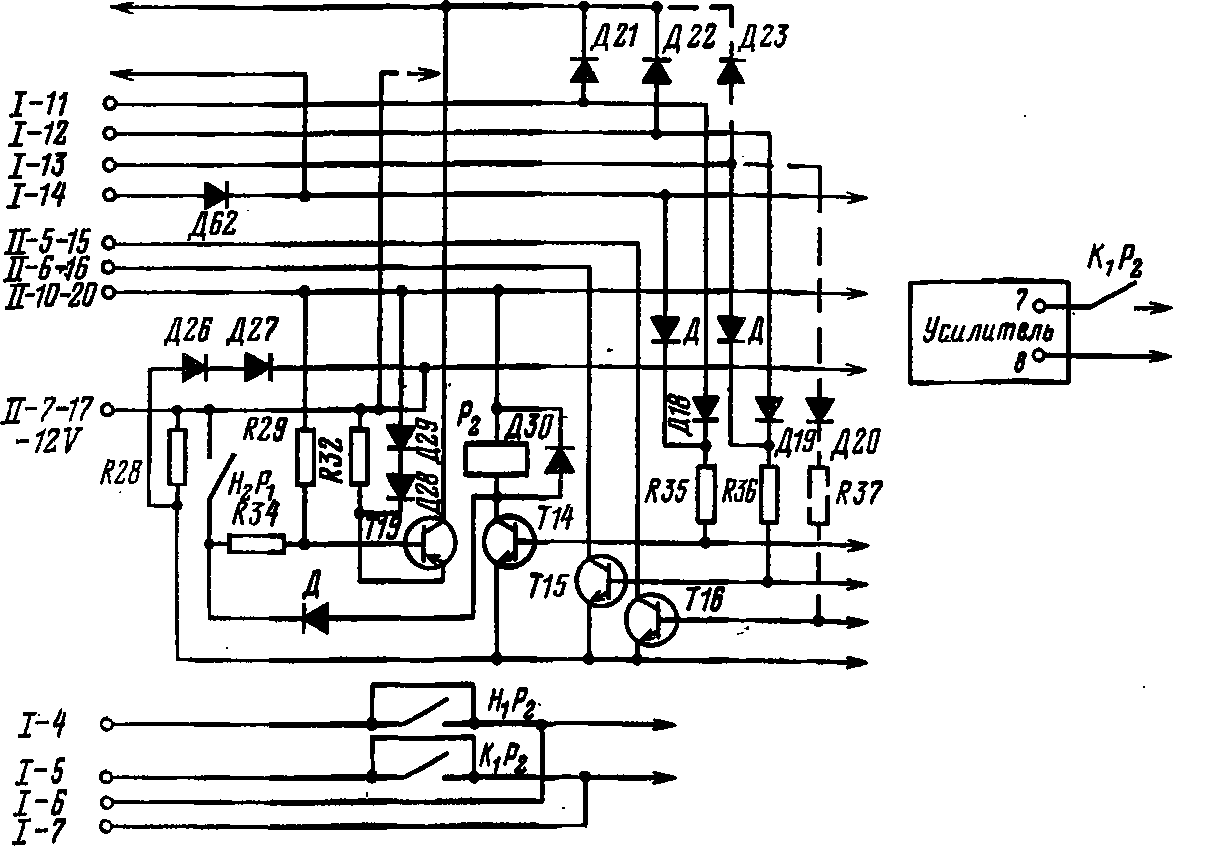
Рис. 6.8. Изменения в БН1 — 01.
------------ —исключенные связи; ----------------- — новые связи.
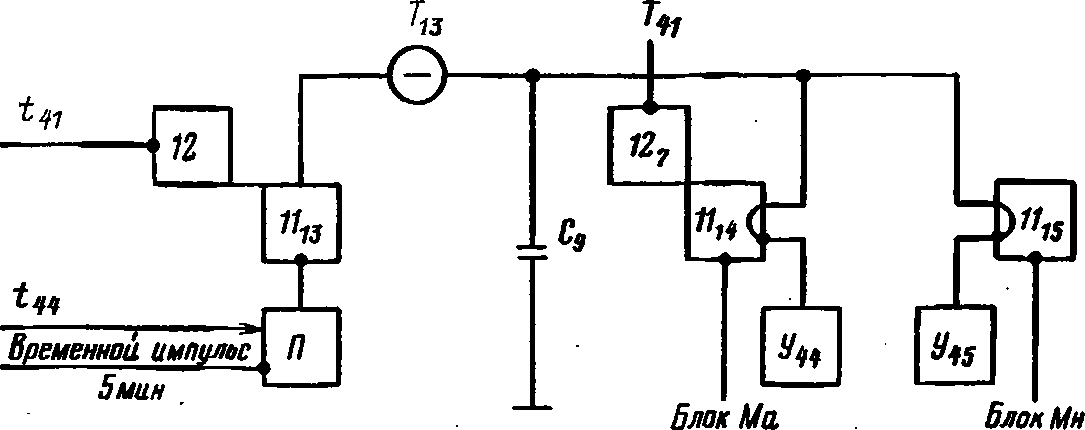
Рис. 6.9. Схема отключения зоны блокировки сигнализации.
В этом случае светозвуковая сигнализация предупреждает оператора о приближении значения параметра к опасному значению без фиксации на УРО, а информация УРО используется для оценки работы оперативного персонала.
3.9. Схема останова двигателя УРО
Непрерывный режим работы двигателя УРО приводит к преждевременному износу механических узлов и к частому выходу из строя самого двигателя. На рис. 6.12 приведена схема останова, в которой, за исходное принято остановленное состояние двигателя.
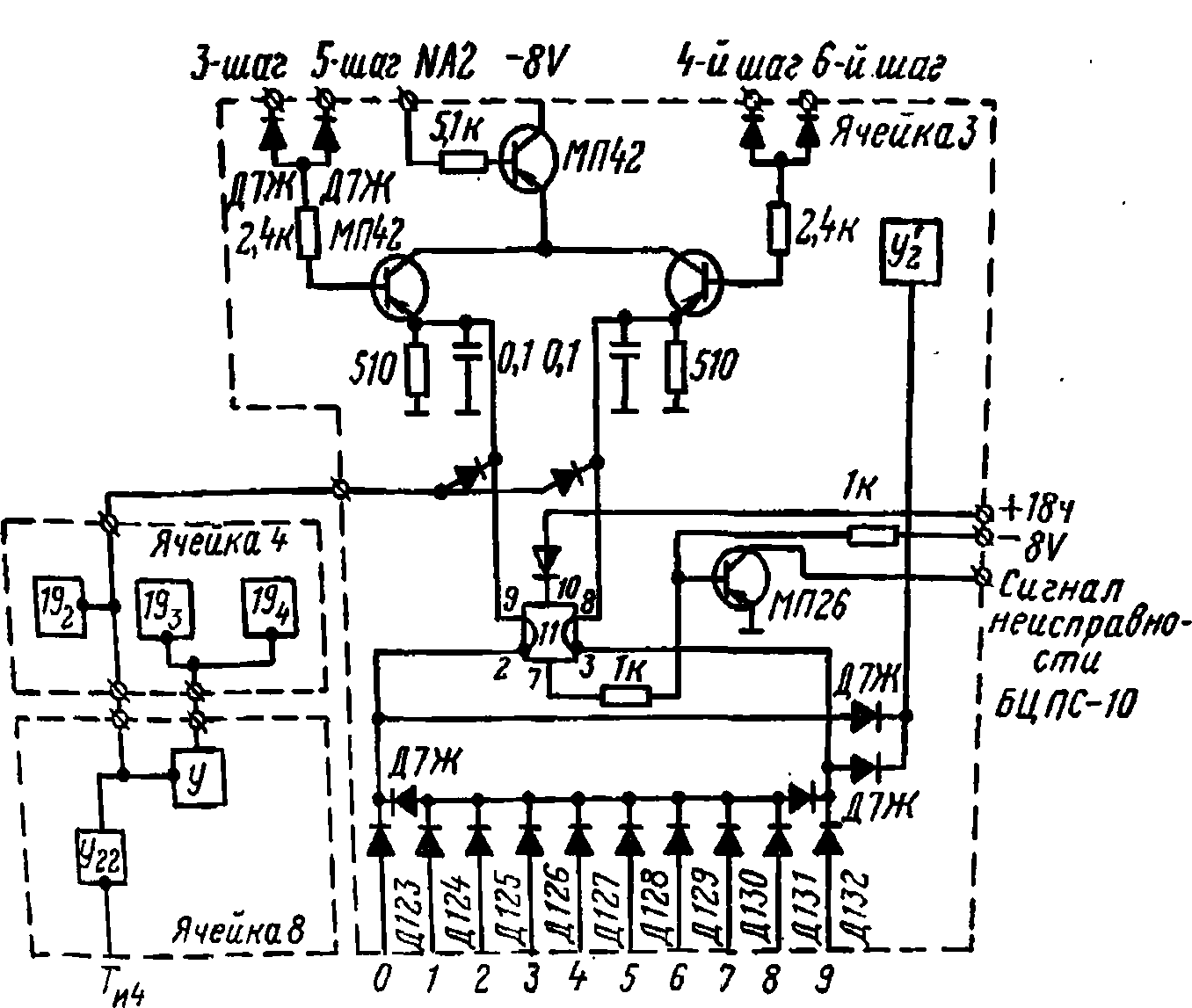
Рис. 6.10. Контроль схемы формирования уставок.
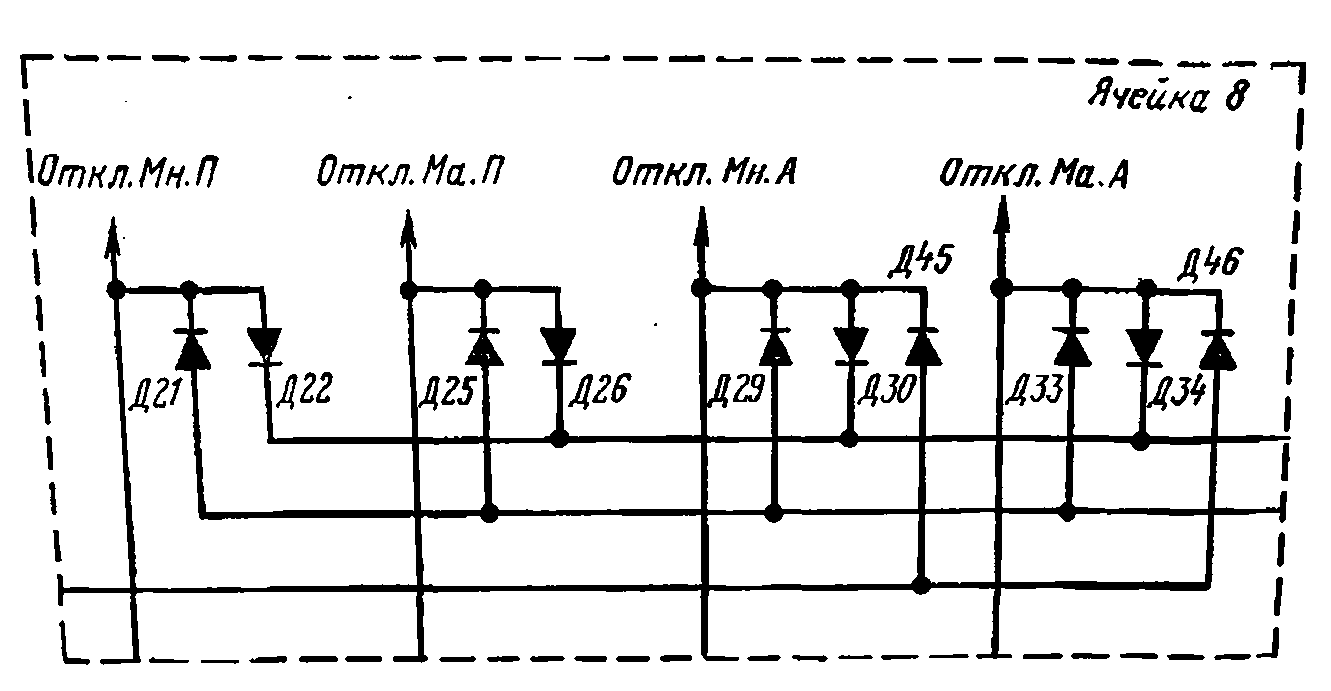
Рис. 6.11. Схема разделения запуска УРО в светозвуковой сигнализации.
При появлении сигнала отклонения либо возврата к нормальному значению двигатель запускается, осуществляются выбор графы, память, возврат каретки и останов двигателя.
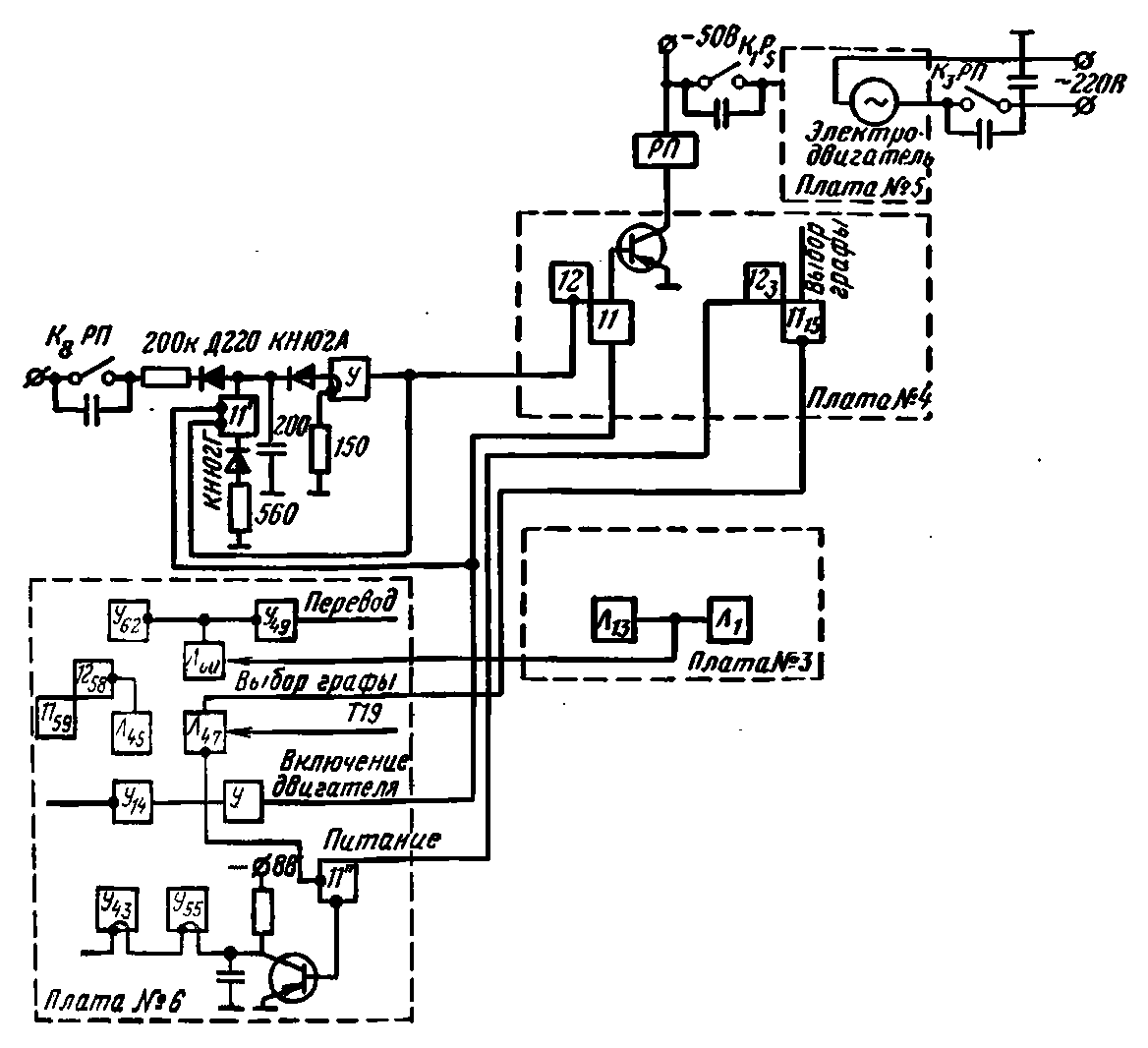
Рис. 6.1·2. Схема управления пуском двигателя УРО.
Схема работает следующим образом:
при появлении сигнала перехода («Отклонение» или «Норма») «1» заносится в модуль Л47, гасится линия задержки отключения двигателя, включается электродвигатель и запрет возврата каретки модуля 11. Модуль Л47 выполняет функцию задержки включения магнита выбора граф. Считывание с модуля Л47 осуществляется тактом ΤΙ9 (начало 9-й группы). Если регистрируется параметр 1 — й группы, то получается минимальная задержка начала регистрации, равная 128 мс плюс время выбора графы. Этого времени достаточно для разгона двигателя. Запрет на модуле 11 необходим для предотвращения одновременной работы схемы по команде «Общий вызов» и от сигнала перехода. Запрет снимается после выбора графы. Гашение линии задержки отключения двигателя исключает останов двигателя при регистрации параметров.
После выбора графы осуществляется перевод строки при регистрации параметров.
После выбора графы осуществляется перевод строки при условии наличия «1» в модуле Л60 и начинается печать параметра.
Перевод строки после выбора графы исключает перегрузку блока питания. По окончании регистрации каретка возвращается в начало строки, и с приходом сигнала «Отклонение» цикл повторяется.
Время линии задержки около 16 с. По истечении 16 с линия задержки отключает двигатель. В связи с увеличением времени на цикл регистрации необходимо увеличить постоянную времени линии задержки возврата каретки.