Глава X.
ПРИБОРЫ УПРАВЛЕНИЯ СУДНОМ
§ 57. СУДОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИННЫЕ ТЕЛЕГРАФЫ
Судовые телеграфы относятся к системам командной связи. В основном их используют для передачи из рулевой рубки в машинное отделение, к постам управления главными двигателями, команд о пуске, остановке, частоте и направлении вращения двигателей (машинный телеграф).
Принцип действия судового электрического машинного телеграфа основан на синхронной передаче угла, под которой понимают одновременное вращение осей, не имеющих между собой механической связи, на равные или пропорциональные угловые величины.
Основными элементами системы являются: датчик-прибор, посредством которого передаются приказания, и приемник-прибор, воспроизводящий переданное приказание. Особенностью машинного телеграфа, как средства передачи обусловленных текстов приказаний, является совмещение в одном посту управления обоих элементов двусторонней связи— датчика и приемника, имеющих одну общую шкалу с текстами команд. Посылка команды осуществляется поворотом рукоятки поста управления в положение, при котором связанная с ней механическая стрелка-указатель установится против соответствующего текста команды.
В приемнике имеется электрическая стрелка-указатель, перемещающаяся синхронно с механической стрелкой датчика.
Получив сигнал и определив по положению электрической стрелки текст переданной команды, вахтенный механик переводит рукоятку своего поста управления в положение, при котором механическая стрелка его датчика совместится с электрической стрелкой приемника. В данном случае электрическая стрелка приемника поста управления в рубке должна синхронно переместиться и совместиться с механической стрелкой датчика. Судоводитель получает подтверждение, что его команда принята правильно.
Чтобы привлечь внимание машинного вахтенного персонала к передаваемой команде, поворот рукоятки поста управления в рубке сопровождается включением звукового и светового сигналов в машинном отделении. Посты управления, помимо рубки, установлены на крыльях ходового мостика. Такие посты имеют с центральным постом в рубке механическую валиковую связь.
§ 58. СУДОВЫЕ ТЕЛЕГРАФЫ И УКАЗАТЕЛИ ПОСТОЯННОГО ТОКА
На судах, где в качестве основного принят постоянный ток, работа машинного телеграфа основана на импульсной системе синхронной связи. При импульсной системе передача перемещений осуществляется отдельными равными импульсами тока, а вращение вала приемника происходит скачкообразно.
Датчик-ключ импульсной системы состоит из коммутатора в виде барабана с контактной поверхностью, охватывающей дугу 132°, трех токосъемных щеток, сдвинутых одна относительно другой на 120° и соприкасающихся с поверхностью барабана, а также латунного контактного цилиндра с токоподводящими контактными пружинами. Коммутатор и контактный цилиндр соединены электрически и жестко укреплены на общем валу.
Приемник телеграфа представляет собой электромагнитный двигатель, состоящий из трех парных электромагнитов, расположенных под углом 120° один по отношению к другому, и системы передачи движения (тяги, кривошип, эксцентрик). Якорьки электромагнитов при попеременном, строго последовательном притягивании к сердечникам катушек, воздействуют с помощью тяг на кривошип, связанный с валом прибора, и вызывают его поворот на 120° при каждом притяжении якорька. При последовательном притяжении всех трех якорьков вал двигателя повернется на 360°. Стрелка-указатель связана с валом через зубчатую передачу и при каждом импульсе поворачивается на одно деление, а при повороте вала на 360° — на три деления.
Принципиальная электрическая схема соединений машинного телеграфа при двусторонней связи показана на рис. 108.
При повороте рукоятки датчика Д1 и вращении командного барабана последовательно замыкаются с расположенным на его поверхности контактным сегментом щетки I, II и III. В результате этого попеременно включаются в цепь питания катушки электромагнитов приемника П1. За каждый полный оборот барабана командная стрелка датчика и исполнительная стрелка приемника переместятся на три деления и в итоге обе установятся против одного и того же деления шкалы с заданным текстом команды. Одновременно с началом поворота датчика Д1 получает питание катушка реле сигнализации РС1.
Последнее замыкает свой контакт в цепи ревуна Рв, звуковой сигнал будет действовать в течение всего времени вращения барабана датчика.
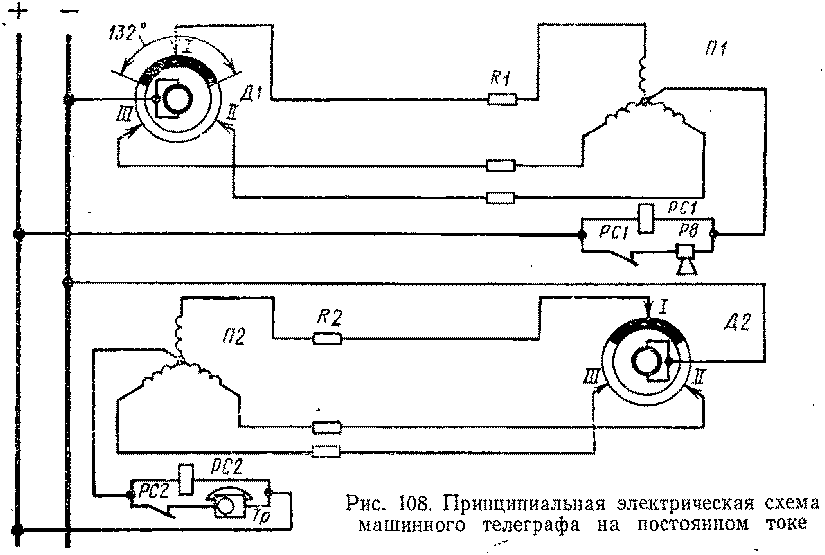
Вахтенный механик, приняв сигнал, поворачивает рукоятку своего датчика-ключа Д2 до совмещения его командной стрелки с исполнительной стрелкой приемника П1. При этом исполнительная стрелка приемника Л2 должна повернуться па тот же угол и совместиться с командной стрелкой датчика-ключа Д1. Одновременно с подачей вахтенным механиком ответа сигнальное реле РС2 включит в рубке звуковой сигнал-трещотку. Судоводитель убедится, что команда принята правильно.
Рулевые указатели на постоянном токе работают также по принципу импульсной синхронной связи.
Приемник рулевого указателя представляет собой такой же электромагнитный двигатель с тремя парами катушек, как и в уже описанной схеме машинного телеграфа. Замыкание контактов коммутатора датчика вызывает попеременное включение под напряжение катушечных пар приемника и в конечном счете круговое движение электрической стрелки по шкале приемника.
Зубчатая передача между баллером руля и барабаном датчика рассчитана так, чтобы при каждом повороте баллера руля на 1° происходило одно замыкание очередной щетки с контактным сегментом на барабане датчика и приемнику посылался один импульс тока. Следовательно, поворот баллера руля на 1° вызывает перемещение стрелки приемника на одно деление.
Коммутатор датчика рулевого указателя, в отличие от коммутатора машинного телеграфа, имеет контактный сектор, разделенный на две части, расположенные на диаметрально, противоположных сторонах барабана и охватывающие по дуге 72° каждая. Вследствие этого за один оборот барабана каждая щетка коммутатора придет в соприкосновение с контактным сегментом два раза, а приемник получит не три, как у машинного телеграфа, а шесть импульсов, и стрелка переместится на шесть делений, что будет соответствовать повороту баллера руля на 6°.
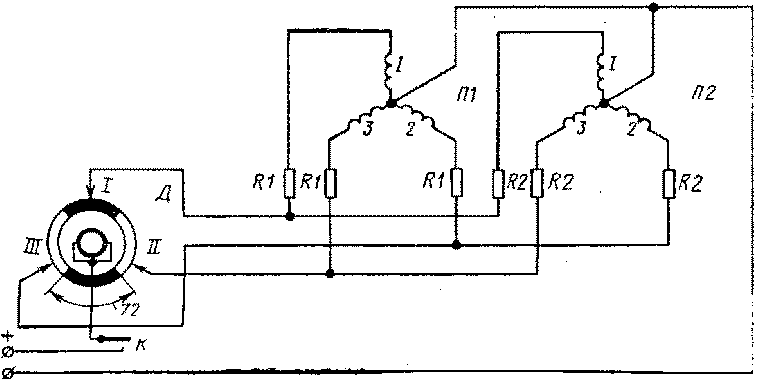
Рис. 109. Принципиальная электрическая схема рулевого указателя на постоянном токе
В цепь питания датчика рулевого указателя включается специальное контактное устройство, размыкающее цепь, когда перо руля проходит диаметральную плоскость судна. Этим производится автоматическое согласование показаний датчика и приемника, так как стрелка приемника рулевого указателя возвращается в нулевое положение при каждом перерыве в питании катушек электромагнитов приемника.
Принципиальная электрическая схема рулевого указателя, состоящего из датчика Д, механически связанного с баллером, и двух приемников П1 и П2, изображена на рис. 109. Контактное устройство К размыкает цепь питания датчика, когда перо руля находится в диаметральной плоскости судна.
Машинные телеграфы и рулевые указатели получают электроэнергию непосредственно от судовой электрической сети напряжением 110 или 220 В, в то время как их катушки рассчитаны на напряжение 55—75 В. Поэтому последовательно с каждой парой катушек в цепь включены добавочные сопротивления.
§ 59. СУДОВЫЕ ТЕЛЕГРАФЫ И УКАЗАТЕЛИ ПЕРЕМЕННОГО ТОКА
При наличии на судне сети переменного тока для приборов управления судном применяют индукционную самосинхронизирующуюся синхронную передачу. Основным элементом такой системы являются сельсины,— индукционные машины по типу однофазных асинхронных двигателей — с однофазной обмоткой возбуждения и трехфазной синхронизирующей обмоткой. Трехфазная обмотка чаще всего располагается на статоре машины и соединяется в звезду, однофазная обмотка возбуждения — на роторе сельсина и подключается к сети переменного тока. Трехфазные обмотки сельсина-приемника и сельсина-датчика соединяются так, чтобы э.д.с. обмоток приемника и датчика были направлены навстречу одна другой и при одинаковом положении роторов были равны по величине (рис. 110).
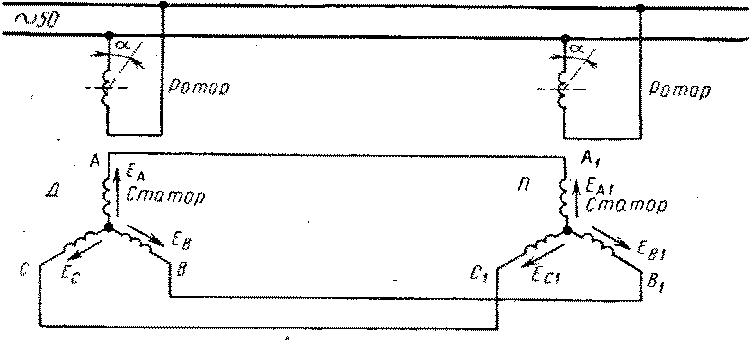
Рис. 110. Принципиальная схема машинного телеграфа па переменном токе
При повороте ротора датчика на некоторый угол равенство э.д.с. фазных обмоток датчика и приемника нарушится, между ними возникнут уравнительные токи и разовьется вращающий момент, под действием которого ротор сельсина-приемника повернется на тот же угол, что и ротор сельсина-датчика.
От одного сельсина-датчика могут питаться несколько сельсинов-приемников, что позволяет иметь ряд контрольных постов управления.
Принципиальная электрическая схема машинного телеграфа с самосинхронизирующейся системой передачи дана на рис. 111.
Основными элементами схемы являются: передатчик-приемник, скомплектованный из сельсина-датчика Д1, сельсина-приемника П2, бленкера БЛ, зуммера ЗМ, понизительного трансформатора Тр и четырех ламп накаливания для освещения шкал; приемник- передатчик, скомплектованный из сельсина-приемника П1 и ответного сельсина-датчика Д2; следящая система с реле сигнализации PC; бленкер БЛ; прибор контроля реверсирования КР, приборы сигнализации: звонок Зв, сигнальная лампа ЛС, ревун Рв.
Следящая система приемника-передатчика служит для автоматического включения сигнальных приборов с момента подачи сигнала и выключения их при подаче ответа.
Команда подается поворотом рукоятки сельсина-датчика в положение, при котором механическая стрелка устанавливается против соответствующего текста приказа. Возникшее рассогласование в системе создает синхронизирующий момент, вследствие чего ротор сельсина-приемника П1 повернется на заданный угол. Одновременно повернется механически связанный с ним диск 1 следящей системы. При этом контактная пружина а, расположенная против выреза диска 1, выходит из выреза и замыкается с контактом б. В результате получает питание электромагнитное реле сигнализации РС, которое замыкает свои контакты PC в цепи приборов сигнализации.
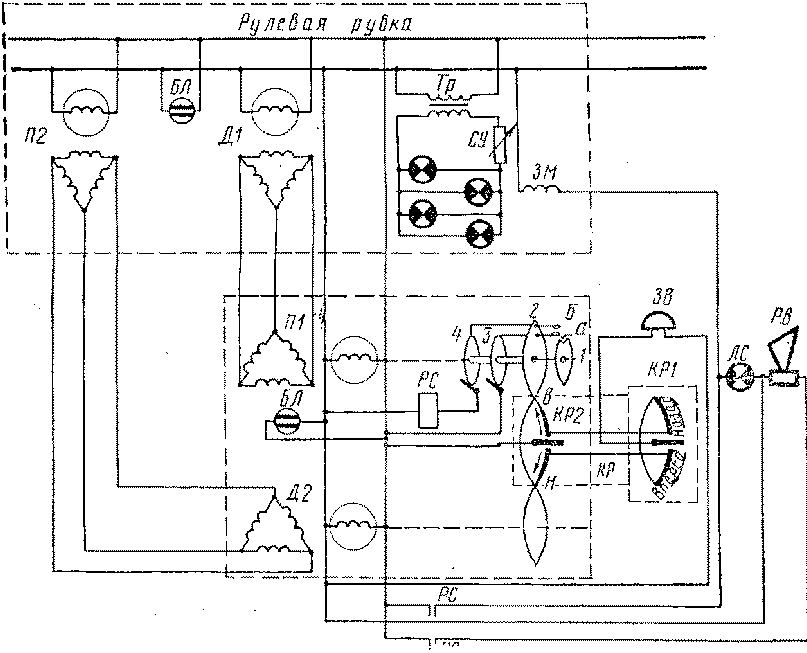
Рис. 111. Принципиальная схема машинного телеграфа с индукционной самосинхронизирующей системой передачи
При ответе одновременно с поворотом ротора сельсина-датчика Д2 через системы шестерен повернутся диск 2 и контактные кольца 3 и 4.
Контактная пружина а вновь установится против выреза диска 1, контакты пружин а и б разомкнутся, реле сигнализации РС лишится питания и действие приборов сигнализации прекратится.
Прибор контроля реверсирования КР состоит из двух контактных систем КР1 и КP2. Контактная система КР1 установлена в пульте управления главными двигателями, КР2 — в корпусе приемника-датчика.

Рис. 112. Принципиальная электрическая схема рулевого указателя самосинхронизирующейся синхронной связью
Контактные устройства представляют собой латунные сегменты, по которым скользит контактная щетка. В системе КР1 контактная щетка механически связана с рычагом реверсирования двигателя. Контактная щетка системы КР2 через шестеренчатую передачу соединена с рукояткой датчика Д2.
При ответе рукоятка датчика Д2 поворачивается в положение, при котором его механическая стрелка устанавливается против электрической стрелки приемника. Контактная щетка системы КР1, следуя за рукояткой датчика, поворачивается и скользит, предположим, по сегменту в. Если рычаг реверсирования при выполнении команды вахтенным механиком повернут в направлении Вперед, контактная щетка системы КР2 будет скользить по сегменту в. Приказ принят правильно, и звонок звонить не будет. Если же приказ выполнен ошибочно и рычаг реверсирования повернут в направлении вращения Назад, контактная, щетка системы КР2 начнет скользить по сегменту Н и цепь питания звонка замкнется. Резкий звонок обратит внимание механика на его ошибку.
Аналогичная описанной принципиальная схема рулевого телеграфа изображена на рис. 112.
Сельсин-датчик Д механически связан с баллером руля. Его синхронизирующая обмотка электрически соединена с синхронизирующими обмотками сельсинов-приемников П1 и П2. Приемник П1 установлен в рулевой рубке, а приемник П2 — в машинном отделении.
Поворот ротора сельсина-датчика на определенный угол нарушает равновесие в системе синхронной связи и вызывает поворот роторов сельсинов-приемников на заданный угол рассогласования. Стрелка на шкалах приемников покажет угол отклонения пера руля.