Глава VII.
ЭЛЕКТРОПРИВОДЫ СУДОВЫХ МЕХАНИЗМОВ И ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
§ 44. РУЛЕВОЙ ЭЛЕКТРОПРИВОД И ЕГО СИСТЕМЫ УПРАВЛЕНИЯ
Для удержания судна на заданном курсе, а также для изменения направления его движения служит рулевое устройство. Оно состоит из руля с вращающим его баллером, передаточного механизма, исполнительного двигателя, системы управления и контролирующего устройства (рулевого указателя) — аксиометра, регистрирующего положение пера руля относительно диаметральной плоскости судна. Рулевой привод — ответственнейший орган судна, обеспечивающий его маневренные качества. Потеря управляемости судном может привести к серьезной аварии.
К рулевому электроприводу предъявляются следующие требования:
надежность, долговечность и безотказность действия во всех эксплуатационных режимах;
живучесть, способность обеспечивать управляемость при частичном повреждении рулевого устройства;
изменение вращающего момента на валу двигателя в широких пределах (от 0 до 200%);
ограничение момента двигателя при перегрузке или заклинивании руля вплоть до его полной остановки;
обеспечение требуемого Правилами Речного Регистра угла и скорости перекладки руля, времени перекладки руля с борта на борт, которое не должно превышать нормируемое;
возможность дистанционного управления электроприводом с нескольких мест, а также быстрого перехода с основного управления на вспомогательное (аварийное).
Различают рулевые электроприводы:
с механической передачей (секторной, штуртросной, винтовой), у которых электродвигатель непосредственно соединяется с механизмом передачи движения на баллер руля;
с гидравлической передачей, у которых баллер руля приводится в движение от гидравлической системы.
По характеру действия рулевые электроприводы делятся на приводы:
простого действия, у которых положение рукоятки поста управления не связано с положением пера руля;
следящего действия, у которых угол поворота рукоятки поста управления в точности соответствует углу поворота пера руля; перо руля как бы следит за всеми изменениями положения рукоятки управления;
автоматического действия (авторулевые), обеспечивающие автоматическую перекладку руля при всяком отклонении судна от заданного курса на угол, необходимый для возвращения его на прежний курс.
Момент сопротивления, действующий на баллере руля, прямо пропорционален площади руля и квадрату скорости движения судна и зависит от угла перекладки а, т. е. угла поворота плоскости пера руля относительно диаметральной плоскости судна.
Чем значительнее угол перекладки, тем больше сила давления воды и момент сопротивления на баллере. Максимального значения момент сопротивления достигает при угле перекладки амакс , который, в свою очередь, зависит от профиля пера руля судов внутреннего плавания. Угол перекладки для пластинчатых рулей принимается равным 45° и для обтекаемых 35°.
Характерные графики зависимости момента Mб на баллере руля от угла перекладки а при переднем ходе судна показаны на рис. 78.
При этом следует иметь в виду, что углы отклонения пера руля от диаметральной плоскости судна вправо или влево считаются положительными, а углы, соответствующие обратному ходу пера руля к диаметральной плоскости, — отрицательными.

Рис. 78. График зависимости момента от угла перекладки руля: 1 — для простого руля; 2 — для балансирного руля
Максимальный момент на валу электродвигателя рулевого привода определяют по формуле


Электрические двигатели рулевых электроприводов работают в повторно-кратковременном режиме с большим числом включений (до 350) в течение одного часа.
Для обеспечения соответствующей величины резко переменных вращающих моментов, режима стоянки под током в течение 1 мин, надлежащей скорости перекладки руля исполнительный электродвигатель должен иметь мягкую характеристику.
При непосредственном питании от сети в рулевых электроприводах чаще всего применяют:
при постоянном токе — двигатели постоянного тока с последовательным или смешанным возбуждением, имеющие мягкие естественные характеристики, двигатели постоянного тока с параллельным возбуждением (в рулевых электроприводах небольшой мощности — до 3—4 кВт), имеющие жесткую естественную характеристику. Для смягчения характеристики в цепь якоря этих двигателей вводится невыключаемое сопротивление;
при переменном токе — асинхронные одно- и двухскоростные двигатели с короткозамкнутым ротором; односкоростные асинхронные двигатели чаще используют с повышенным скольжением; асинхронные двигатели с контактными кольцами, имеющие жесткую естественную механическую характеристику, для смягчения которой в цепь ротора вводится активное сопротивление.
В рулевых электроприводах с управлением по системе Г—Д применяют генераторы постоянного тока со смешанным возбуждением (обмотками независимого и последовательного возбуждения), трехобмоточные генераторы, электромашинные усилители и исполнительные двигатели постоянного тока с независимым возбуждением.
Тип приводного двигателя зависит от рода тока судовой электрической сети. При переменном токе используют асинхронный двигатель с короткозамкнутым ротором.
В рулевых электроприводах наибольшее распространение получили системы управления: контакторная, генератор — двигатель, следящая.
Основными элементами простейшей схемы контакторного управления рулевого электропривода небольшой мощности (рис. 80) являются: двигатель постоянного тока со смешанным возбуждением, линейный контактор КЛ, контакторы направления КВ и КН, кнопки управления «Лево», «Право», путевой выключатель с главными ВП1, ВП2 и вспомогательными ВП3, ВП4, ВП5 контактами, резисторы — невыключаемые СТ и СП, разрядный СР и добавочный СД, сигнальные лампы ЛЗ, ЛБ и ЛК.
Двигатель запускается нажатием кнопки «Лево» или «Право» в зависимости от того, на какой борт перекладывается руль.
Предположим, что нажимается и удерживается в нажатом положении кнопка «Право». Получают питание катушки линейного контактора КЛ и контактора направления КВ.

Рис. 80. Контакторное управление электропривода руля
Контакторы, притягивая к сердечникам свои якоря, замыкают в главной цепи контакты КЛ и один из контактов КВ, второй контакт КВ размыкается. Якорь двигателя подключается к питающей сети и начинает вращаться. Одновременно размыкается контакт ВП4 и замыкается контакт ВП3 путевого выключателя. Гаснет белая лампа и загорается зеленая, сигнализирующая о том, что руль переложен на правый борт.
Когда руль переместится на заданный угол, пусковую кнопку отпускают, контакторы лишаются питания и отключают якорь двигателя от сети. Двигатель включается на электродинамическое торможение.
Аналогично производится пуск двигателя в обратном направлении, только при этом нажимается кнопка «Лево» и получают питание катушки контактора линейного КЛ и направления КН.
Для защиты электропривода от перегрузок и токов короткого замыкания имеется установочный автоматический выключатель АВ.
На грузовых теплоходах типов «Большая Волга», «Красное Сормово» и других в рулевых электроприводах применено контакторное управление с использованием контакторов с выдержкой времени (рис. 81).
Элементы схемы: двигатель постоянного тока со смешанным возбуждением, пускорегулировочные R1, R2 и R3 и тормозной R4 резисторы, магнитная станция, укомплектованная четырьмя контакторами направления КВ1, КВ2, КН1, КН2, тремя контакторами с выдержкой времени, имеющими удерживающие ТУ1, ТУ2, ТУ3 и втягивающие ТВ1, ТВ2, ТВ3 катушки, тормозным контактором КТ, тормозным реле РТ, реле максимального тока РМ, грузовым реле РГ, постом управлений ПУ, резисторами — добавочным СД, разрядным СР, сигнальными лампами ЛЗ, ЛБ, ЛК, амперметром, предохранителями.

Рис. 81. Контакторное управление электропривода руля с контакторами с выдержкой времени
Приведенная схема позволяет производить пуск электродвигателя в функции времени, его реверсирование, торможение и остановку. Пуск двигателя выполняется вручную, постепенным переводом рукоятки поста управления (командоконтроллера) из одного фиксированного положения в другое. При переводе рывком рукоятки поста управления из нулевого в одно из крайних положений пуск двигателя будет происходить автоматически, с соблюдением заданных выдержек времени.
Контакторы ускорения настроены на строго определенную выдержку времени, необходимую для разгона двигателя на каждой искусственной характеристике (для первой ступени—1 с, второй — 0,8 с, третьей — 0,5 с). В соответствии с заданной выдержкой времени и будет происходить автоматический пуск двигателя с постепенным выводом из цепи якоря отдельных ступеней пускового сопротивления.
При пуске двигателя скорость перевода рукоятки поста управления из одного фиксированного положения в другое должна быть но времени не меньше уставок времени контакторов; тогда к моменту перевода рукоятки контактора в следующее положение он уже выполнит необходимые переключения в схеме.
Работает схема следующим образом. Предварительной операцией, предшествующей пуску электродвигателя, является включение схемы под напряжение пакетным выключателем. При этом получают питание обмотка параллельного возбуждения ОПВ двигателя (через добавочный резистор СД) и удерживающая катушка ТУ1 контактора ускорения первой ступени. Контактор размыкает свой контакт в цепи втягивающей катушки ТВ1 и замыкает контакт ТУ1 в цепи удерживающей катушки ТУ2 второго контактора. Загорается одна из сигнальных ламп, определяющих положение пера относительно диаметральной плоскости судна.
Пуск двигателя производится постепенным переводом рукоятки управления из нулевого в одно из крайних (четвертое) положений. При переводе рукоятки в положение 7, например Право, получают питание катушки контакторов направления КВ1, КВ2 и удерживающая катушка ТУ2 контактора ускорения второй ступени. Контакторы направления Вперед КВ1, КВ2 замыкают свои силовые контакты, определяющие направление тока в цепи якоря двигателя и размыкают соответствующие контакты в цепи тормозного реле РТ и резистора R4. Электродвигатель подключается к сети через полностью введенный в цепь якоря пускорегулировочный реостат и начинает разгон по третьей искусственной характеристике. Одновременно контакторы КВ1, КВ2 размыкают свои блок-контакты в цепи удерживающей катушки ТУ1 и в цепи контакторов направления ΚΗ1, КН2 (электрическая блокировка), а контактор КВ2 замыкает свой блок-контакт, шунтирующий резистор СД в цепи возбуждения двигателя. Контактор ускорения второй ступени размыкает контакт ТУ2 в цепи своей втягивающей катушки ТВ2 и замыкает контакт ТУ2 в цепи удерживающей катушки контактора ТУ3. Контактор ускорения третьей ступени размыкает контакт ТУЗ в цепи своей втягивающей катушки ТВ3.
Так как при замыкании контакта КВ1 удерживающая катушка ТУ1 первого контактора лишилась питания, она с заданной выдержкой времени замкнет контакт ТУ1 в цепи своей втягивающей катушки ТВ1. Теперь рукоятка поста управления может быть переведена в положение 2, в котором замкнутся контакты КЗ. При этом включится цепь питания втягивающей катушки ТВ1. Якорь притягивается к сердечнику катушки, в результате замыкаются контакт ТВ1, шунтирующий первую ступень пускорегулировочного реостата, блок-контакт ТУ1 в цепи втягивающих катушек ТВ2, ТВЗ и разомкнется блок-контакт ТУ1 в цепи удерживающей катушки ТУ2. Двигатель продолжит разгон уже по второй искусственной характеристике.
Удерживающая катушка контактора второй ступени, лишившись питания, с заданной выдержкой времени замкнет контакт ТУ2 в цепи своей втягивающей катушки ТВ2. Теперь, при переводе рукоятки поста управления в положение 3 и замыкании контактов К4, под напряжение включается втягивающая катушка ТВ2 контактора ускорения второй ступени. Контактор замыкает контакт ТВ2 и из цепи якоря двигателя выводится вторая ступень R2 пускорегулировочного реостата. Разгон двигателя продолжается уже по первой реостатной характеристике. Одновременно размыкается контакт ТУ2 в цепи удерживающей катушки ТУ3 и замыкается контакт ТУ2 в цепи втягивающей катушки ТВ3. Удерживающая катушка ТУ3 с заданной выдержкой времени замыкает контакт ТУЗ в цепи втягивающей катушки ТВ3.
Перевод рукоятки поста управления в положение 4 и замыкание контактов К5 вызывает срабатывание контактора третьей ступени ускорения. Его контакт ТВ3 шунтирует третью, последнюю, ступень R3 пускорегулировочного реостата. Разгон двигателя завершается по естественной характеристике.
Торможение двигателя производится по принципу динамического торможения; кроме того, предусмотрена возможность реверсирования его противотоком.
При возвращении рукоятки поста управления в нулевое положение отключается цепь управления и все аппараты возвращаются в исходное положение. Контакторы направления отключают якорь двигателя от сети и замыкают его на тормозной резистор R4. Обмотка параллельного возбуждения остается под напряжением с несколько уменьшенным магнитным потоком вследствие наличия в цепи возбуждения резистора СД.
Параллельно резистору R4 включено реле торможения РТ, которое в режиме динамического торможения срабатывает и своим контактом РТ включает под напряжение контактор КТ. Последний замыкает свой контакт и подключает к сети через пускорегулировочные резисторы R1, R2 и R3 обмотку последовательного возбуждения ОПСВ двигателя. Магнитные потоки обеих обмоток возбуждения направлены согласно, суммируются и обеспечивают интенсивное торможение.
В схеме предусмотрена максимальная, минимальная и грузовая защита.
Максимальная защита осуществляется реле максимального тока РМ. При срабатывании реле размыкается его контакт в цепи контакторов направления КВ1 и КВ2, КН1 и КН2, отключающих двигатель от сети. Минимальная защита обеспечивается контакторами направления, отключающими при понижении напряжения сети на 50% двигатель от сети.
После восстановления напряжения пуск двигателя производится в уже описанном порядке.
Для защиты от перегрузок предназначено грузовое реле РГ, имеющее выдержку времени при возврате в начальное положение.
Грузовое реле РГ при перегрузке 200%Iн размыкает свой контакт РГ в цепи втягивающих катушек ТВ2 и ТВ3 контакторов ускорения. В результате в цепь якоря двигателя вводятся две ступени R3 и R2 пускорегулировочного реостата. Двигатель переводится на работу по второй реостатной характеристике. Вращающий момент уменьшается и скорость вращения может снизиться до кратковременной (до 1 мин) стоянки под током.
При уменьшении момента и соответственно тока до 1,5-кратной величины поминального тока грузовое реле вновь замыкает свой контакт РГ в цепи втягивающих катушек ТВ2 и ТВ3. Контакторы в свою очередь замыкают контакты ТВ2, ТВ3 и выводят из цепи якоря двигателя ступени R2 и R3 пускорегулировочного реостата, переводя двигатель па работу по естественной характеристике.
Защита цепи управления от токов короткого замыкания производится плавкими предохранителями Пр.
В рулевых электроприводах широко применяется управление по системе Г—Д.
Принципиальная схема управления электропривода рулевого устройства, получившая распространение на грузовых и грузопассажирских речных судах и буксирах-толкачах, показана па рис. 82.
Основные элементы схемы: преобразователь, состоящий из приводного асинхронного двигателя ДП, генератора Г постоянного тока с независимым возбуждением ОНГ и размагничивающей обмоткой ОР и возбудителя В; двигатель-исполнитель ДИ постоянного тока с обмоткой независимого возбуждения ОНД, пост управления с командоконтроллером и регулировочными резисторами R1, R2, R3 в цепи возбуждения генератора; магнитный пускатель с линейным контактором КЛ и тепловыми реле РТ; резисторы — разрядный СР и дополнительные СД1—СД4; путевые выключатели с контактами ВП1—ВП5, регулятор возбуждения в цепи возбуждения возбудителя РВ; сигнальные лампы ЛБ, ЛЗ и ЛК.
Схема работает следующим образом. Пуск приводного двигателя ДП производится магнитным пускателем. При нажатии кнопки «Пуск» срабатывает линейный контактор КЛ и включает двигатель в сеть. Двигатель ДП приводит во вращение генератор Г. Управляют рулевым двигателем изменением направления и величины тока в обмотке независимого возбуждения генератора ОНГ с помощью регулировочных резисторов R1, R3.
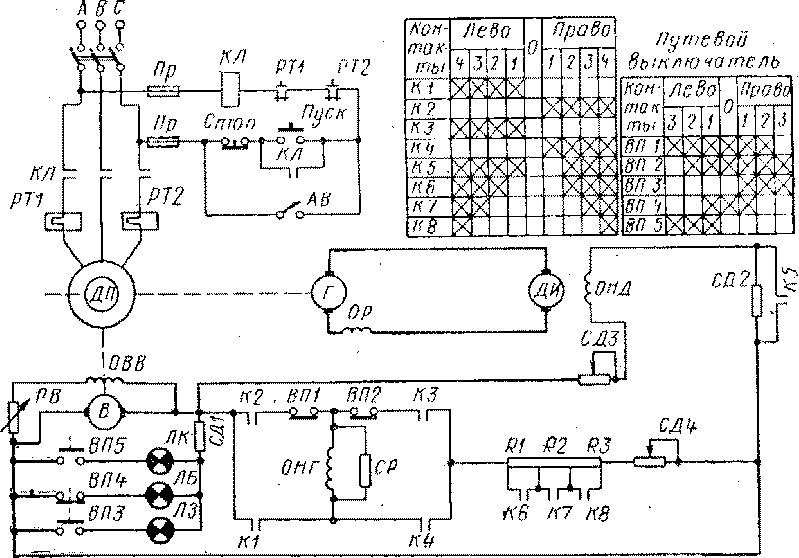
Рис. 82. Принципиальная схема управления электропривода руля по системе Г—Д
Отдельные секции регулировочного резистора вводятся в цепь обмотки независимого возбуждения генератора или выводятся из нее командоконтроллером. Питание независимых обмоток возбуждения генератора и рулевого двигателя производится от возбудителя В. Напряжение возбудителя может быть подрегулировано регулятором возбуждения РВ.
Положение пера руля фиксируется тремя сигнальными лампами.: ЛК, ЛБ и ЛЗ, включаемыми контактами путевых выключателей ВП5, ВП4, ВП3.
Путевые выключатели ВП1 и ВП2 ограничивают пределы перекладки руля, выключая цепь возбуждения генератора в крайних правом и левом положениях.
Схема Г—Д обеспечивает автоматическое ограничение тока и момента, а также автоматическое снижение скорости при перегрузке.
В цепи питания приводного асинхронного двигателя предусмотрены тепловые реле РТ1, РТ2, срабатывающие при 3-кратном номинальном токе и разрывающие цепь питания линейного контактора КЛ магнитного пускателя. Контактор КЛ размыкает свои контакты КЛ и отключает двигатель от сети. Минимальная защита обеспечивается линейным контактором.
На современных речных судах, имеющих значительное водоизмещение, большие ширину и длину корпуса, для повышения их маневренных качеств рулевые устройства выполняют в виде поворотных насадок. Такими насадками оборудуются крупнотоннажные суда и буксиры-толкачи, что значительно улучшает их управляемость.

Рис. 83. Принципиальная схема управления электропривода поворотных насадок
В электроприводах поворотных насадок чаще всего применяют электродвигатели постоянного тока со смешанным возбуждением. Управляют электроприводами по системе Г—Д или с применением контакторной системы.
Схема управления электропривода поворотных насадок дизель-электрического толкача типа «Шлюзовой» приведена на рис. 83. Она мало отличается от рассмотренных схем с управлением по системе Г—Д. Некоторая особенность ее заключается в том, что возбудитель снабжен автоматическим регулятором напряжения типа РУН, предназначенным для поддержания номинального напряжения на зажимах генератора в случае уменьшения скорости вращения приводного двигателя. Последнее возможно при изменении частоты тока в бортовой электрической сети, которая в ходовом режиме судна питается от валогенератора.
Основные элементы схемы: трехмашинный агрегат, состоящий из приводного асинхронного двигателя ДП с короткозамкнутым ротором, генератора Г постоянного тока с обмоткой независимого возбуждения ОВГ и последовательной размагничивающей обмоткой ОР, возбудителя В; исполнительный двигатель ДИ; автоматический угольный регулятор напряжения РУН; регулятор возбуждения РВ; резисторы регулировочные R1, R2, R3, установочные СУ1 и СУ2, разрядные СР, добавочные СД; путевые выключатели с тремя размыкающими ВП1, ВП2, ВП4 и двумя замыкающими ВИЗ, ВП5 контактами; пост управления ПУ на четыре фиксированных положения в обе стороны от нулевого; пакетный выключатель; сигнальные лампы ЛК, ЛБ, ЛЗ; предохранители.
Схема работает следующим образом. Пуск приводного двигателя ДП трехмашинного агрегата производится непосредственным включением его в сеть пакетным выключателем. После пуска трехмашинного агрегата возбуждается возбудитель. При этом через добавочный резистор СД получает питание обмотка независимого возбуждения ОНД исполнительного двигателя. На этом подготовка к работе системы управления заканчивается.
В работу система включается поворотом рукоятки поста управления ПУ вправо и влево в зависимости от желаемого направления вращения исполнительного двигателя ДИ. В положениях 1, 2, 3, 4 рукоятки поста управления из цепи возбуждения генератора последовательно выводятся одно за другим регулировочные резисторы R1, R2, R3. При переводе рукоятки поста управления из положения 4 в положение 1 регулировочные резисторы постепенно вводятся в цепь независимого возбуждения генератора. Этим регулируются величины э.д.с., развиваемые генератором, подводимое к исполнительному двигателю напряжение и, в конечном счете, угловая скорость вращения исполнительного двигателя.
В схеме имеется защита от токов короткого замыкания, осуществляемая плавкими предохранителями.
Ограничение тока генератора и исполнительного двигателя при избыточных моментах на баллере руля и кратковременной остановке исполнительного двигателя под током основано на размагничивающем действии последовательной обмотки генератора.
Для улучшения маневренных качеств суда, имеющие значительную длину, снабжаются подруливающими устройствами.
Водометные подруливающие устройства устанавливают в подводной носовой, а иногда и кормовой части судна.
Конструктивно подруливающее устройство представляет собой трубопровод, расположенный перпендикулярно диаметральной плоскости судна и соединяющий ниже ватерлинии забортные пространства обоих бортов. Сильным реверсивным насосом пропеллерного типа с приводом от электродвигателя через трубопровод прогоняется забортная вода с одного борта на другой. Поворот судна происходит за счет реактивного действия струй воды, выбрасываемых из трубопровода и создающих на выходе гидравлический упор.

Подруливающие устройства оборудованы на пассажирских дизель-электрических судах типа «Ленин» и «Советский Союз», пассажирских теплоходах типа «Родина» и «Октябрьская революция», на грузовых теплоходах типа «Волго-Дон» и др.
Схема управления электропривода подруливающего устройства грузового теплохода грузоподъемностью 5000 т типа «Волго- Дон» приведена на рис. 84. Пост управления подруливающего устройства установлен в ходовой рубке и смонтирован на пульте дистанционного управления главными двигателями.
Основные элементы схемы: асинхронный электродвигатель трехфазного переменного тока с короткозамкнутым ротором, пусковые резисторы СП, включаемые при пуске в цепь обмотки статора двигателя, контакторы направления КВ (Вправо) и КН (Влево), магнитная станция, система световой сигнализации.
Магнитная станция состоит из контакторов ускорения КУ1, КУ2, реле управления РУ1, РУ.2 (времени), промежуточных РП1, РП2, РП3, РП4 и блокировочного ΡΒ1, тепловых реле РТ1, РТ2 (на двух фазах), полупроводникового выпрямителя ВС, добавочных резисторов СД, кнопок управления «Пуск» и «Стоп».
Мощность электродвигателя подруливающего устройства соизмерима с единичной мощностью генераторов судовой электростанции. Поэтому предварительной операцией при подготовке к пуску подруливающего устройства является включение на параллельную работу обоих стояночных дизель-генераторов, При этом срабатывает подключенное к автоматическим выключателям генераторов блокировочное реле РБ1, замыкающее один свой контакт в цепи промежуточных реле РП1, РП2, подготовляя их включение, и второй контакт в цепи сигнальной лампы ЛБ1, горение в рубке сигнальной лампы ЛБ1 свидетельствует о том, что подруливающее устройство включено. Одновременно на пульте управления в отсеке подруливающего устройства загорается лампа ЛЖ, это значит, что питание на станцию подано.
Кроме того, через выпрямитель ВС под напряжение включается реле времени РУ1, которое замкнет свои контакты в цепи катушек реле РП3 и РП2, подготовляя их включение, и разомкнет контакт в цепи катушки реле РП4, предотвращая включение этого реле одновременно с реле РП3.
Схема работает следующим образом. Для уменьшения величины пускового тока при пуске в цепь статора двигателя вводится активное сопротивление. Направление вращения двигателя задается поворотом рукоятки универсального переключателя УП в положения Вправо или Влево.
При повороте рукоятки универсального переключателя в положение, например, Вправо, получает питание промежуточное реле РП1, замыкающее свои контакты в цепи катушек контактора направления КВ и реле РП3.
Контактор КВ, получив питание, замыкает главные контакты в цепи статора двигателя и блок-контакт в цепи сигнальной лампы ЛК1 («Работа вправо»).
Реле РП3 замыкает соответствующие контакты в цепи контактора ускорения КУ1 и реле времени РУ2. Последнее замыкает контакт РУ2 в цепи реле РП4, подготовляя его включение.
Контактор КУ1 своими главными контактами включает электродвигатель подруливающего устройства в сеть через пусковые резисторы СП. Двигатель начинает разгон по искусственной характеристике.
Кроме того, контактор ускорения КУ1 размыкает свой блок- контакт в цепи реле времени РУ1, отключает его от сети и замыкает блок-контакт КУ1 в цепи промежуточных реле РП3 и в соответствии с уставкой реле времени РУ1 размыкает свои контакты в цепях катушек реле РУ2, РП3 и замыкает контакт в цепи реле РП4.
При размыкании контакта РУ1 реле времени РУ2 отпускает якорь не сразу, а с заданной выдержкой времени, необходимой для разгона двигателя. Поэтому реле РП3 и контактор ускорения КУ1 отключаются не сразу, а еще некоторое время остаются под напряжением сети.
Получив питание, промежуточное реле РП4 замыкает контакты: один, шунтирующий контакты КУ1 и РУ1, и другой, включающий под напряжение контактор ускорения КУ2. Одновременно размыкается третий его контакт, отключающий от сети выпрямитель ВС и цепь реле времени РУ1, РУ2.
При получении питания. контактор КУ2 замыкает главные контакты· КУ2, выводящие из цепи статора пусковые резисторы СП. Двигатель переходит на работу по естественной характеристике. Одновременно замыкается его блок-контакт КУ2 в цепи сигнальных ламп ЛБ2, ЛК1, ЛК2, сигнализирующих о том, что электродвигатель включен, и размыкаются блок-контакты: один в цепи промежуточного реле РПЗ и второй в цепи сигнальной лампы ЛЖ. Промежуточное реле РПЗ размыкает свои контакты в цепи контактора ускорения КУ1 и в цепи реле управления РУ2.
Переводом рукоятки универсального переключателя в нулевое положение электродвигатель и его система управления отключаются от сети.
Для Вращения двигателя в обратном направлении рукоятку переключателя УП ставят в положение Влево. При этом получает питание промежуточное реле РП2, замыкающее свои контакты в цепи катушек контактора направления КН, и реле РП3, и таким образом, включает их под напряжение. Контактор КН замыкает главные контакты КН в цепи статора электродвигателя и блок-контакт КН в цепи сигнальной лампы ЛК2 («Работа влево»). В остальном пуск двигателя происходит в уже описанном порядке.
Защита двигателя от перегрузок осуществляется тепловыми реле РТ1 и РТ2.
Схема допускает ручной пуск двигателя подруливающего устройства в машинном отделении судна нажатием кнопки «Пуск».
В рулевых электроприводах применяют также системы следящего действия. Принципиальная схема бесконтактного управления следящего действия электропривода руля показана на рис. 85.
Основными элементами схемы являются: трехмашинный преобразователь с использованием в качестве возбудителя электро- машинного усилителя ЭМУ (ДП—Г—ЭМУ), двигатель-исполнитель ДИ, магнитные усилители 1МУ и 2МУ, бесконтактные сельсины СД и СП, полупроводниковые выпрямители Bl, В2, В3 и В4, трансформатор ТП. Выпрямители В1 и В2 вместе со вторичными обмотками трансформатора ТП и однофазной обмоткой сельсина-приемника СП образуют фазочувствительный: выпрямительный мост.
Магнитные усилители 1МУ и 2МУ имеют выходные обмотки 1w1 и 1w2, 2w1 и 2w2, подмагничивающие обмотки 1w3 и 2w3, обмотки дополнительного подмагничивания 1w4 и 2w4. Подмагничивающие обмотки получают питание от фазочувствительного выпрямительного моста. Обмотки дополнительного подмагничивания включены в цепь обратной связи по напряжению.

Рис. 85. Принципиальная схема рулевого электропривода следящего действия
Электромашинный усилитель имеет две управляющие обмотки 1ОУ и 2ОУ, подключенные к выходным обмоткам 1w1 и 1w2, 2w1 и 2w2 магнитных усилителей. Магнитные потоки управляющих обмоток 1ОУ и 2ОУ направлены встречно.
При отсутствии сигнала рассогласования токи в обмотках 4ОУ и 2ОУ равны, но противоположно направлены. Электромагнитный усилитель возбуждаться не будет.
Трехфазные обмотки сельсина-датчика и сельсина-приемника соединены между собой. Однофазная обмотка сельсина-датчика СД получает питание от бортовой сети (или от специальной обмотки трансформатора ТП). У сельсина-приемника СП однофазная обмотка включена в фазочувствительный выпрямительный мост.
Ротор сельсина-датчика соединен с постом управления ПУ, а ротор сельсина-приемника — с баллером руля. При повороте штурвала (рукоятки) поста управления электрическое равновесие в цепи трехфазных обмоток сельсинов СД и СП нарушается, в ней появляются уравнительные токи и в систему фазочувствительного выпрямителя поступает сигнал рассогласования. В результате, в зависимости от величины и направления сигнала, в одной обмотке управления ЭМУ ток возрастает, в другой — уменьшается. Электромагнитный усилитель и генератор возбуждаются, и к двигателю-исполнителю ДИ подается напряжение. Двигатель приходит во вращение и перекладывает руль. При повороте руля поворачивается и связанный с его баллером ротор сельсина-приемника. Вращение двигателя продолжается до тех пор, пока ротор сельсина-приемника не займет в пространстве такое же угловое положение, как и ротор сельсина-датчика.
Для сглаживания колебаний напряжения в системе применена обратная связь по напряжению, цепь которой состоит из моста, образованного сопротивлением обмотки якоря двигателя ДИ, резисторами R1, R2, R3. В диагональ моста включены обмотки дополнительного подмагничивания 1w4 и 2w4 магнитного усилителя, разделительный конденсатор С. При равенстве сопротивлений плеч моста (R2-Ra=R3-R1) напряжение обратной связи пропорционально угловой скорости вращения двигателя.
В зависимости от направления вращения ротора сельсина-датчика меняется фаза напряжения сельсина-приемника, что приводит в конечном счете к смене полярности напряжения на выходе ЭМУ и повороту руля в обратную сторону.
Выше были рассмотрены системы управления электромеханических рулевых приводов. На речных судах имеются рулевые установки с гидравлическим управлением. В электрогидравлических рулевых приводах применяют гидравлические машины с насосами постоянной и переменной производительности.
В установках с насосами постоянной производительности руль перекладывается только во время работы насоса, приводимого во вращение двигателем. Изменение направления и скорости перекладки руля достигается реверсированием и регулированием скорости вращения приводного двигателя насоса. Управление двигателем производится по контакторной системе.
В электрогидравлических приводах с насосами переменной производительности применяется специальное золотниковое устройство. Непрерывно работающий насос подает постоянное количество масла, которое почти без давления циркулирует по замкнутой перепускной системе. Для перекладки руля воздействуют на золотник, открывающий путь маслу в один из цилиндров гидравлической машины.
Направление перекладки руля зависит от того, в какой цилиндр нагнетается масло. В данной системе приводной двигатель насоса вращается непрерывно с постоянной скоростью, поэтому могут быть выбраны нерегулируемые электродвигатели с жесткой механической характеристикой, при постоянном токе — двигатель с параллельным возбуждением, при переменном токе — асинхронный двигатель с короткозамкнутым ротором. Коэффициент полезного действия электрогидравлического привода значительно выше электромеханического, что объясняется отсутствием самотормозящего устройства. Он достигает 0,7—0,85.