Глава V.
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
§ 31. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Эксплуатационные свойства электродвигателей определяются их характеристиками, выражающими графическую зависимость между угловой скоростью вращения двигателя, током якоря, моментом, потоком и другими параметрами.
Важнейшими являются механическая и скоростная характеристики. Механическая характеристика выражает зависимость между угловой скоростью вращения ω и создаваемым двигателем моментом М, т. е. зависимость w=f(M).
Скоростная характеристика представляет собой зависимость между угловой скоростью вращения и током якоря w=f(I) при U=const и Iв= const.
Почти у всех электрических двигателей угловая скорость вращения уменьшается с увеличением момента сопротивления. Степень изменения угловой скорости вращения с изменением момента зависит от типа, двигателя и определяется жесткостью характеристики. По степени жесткости различают:
абсолютно жесткую механическую характеристику, при которой угловая скорость вращения остается неизменной и не зависит от величины момента; такую характеристику имеют синхронные двигатели;
жесткую механическую характеристику, при которой угловая скорость вращения с увеличением момента на валу двигателя несколько уменьшается, но в небольших пределах; данную характеристику имеют двигатели постоянного тока с параллельным возбуждением и асинхронные электродвигатели (в пределах рабочей части механической характеристики);
мягкую механическую характеристику, при которой всякое изменение момента вызывает резкое изменение угловой скорости вращения; такие характеристики имеют двигатели постоянного тока с последовательным возбуждением и двигатели со смешанным возбуждением с преобладающей, последовательной обмоткой.
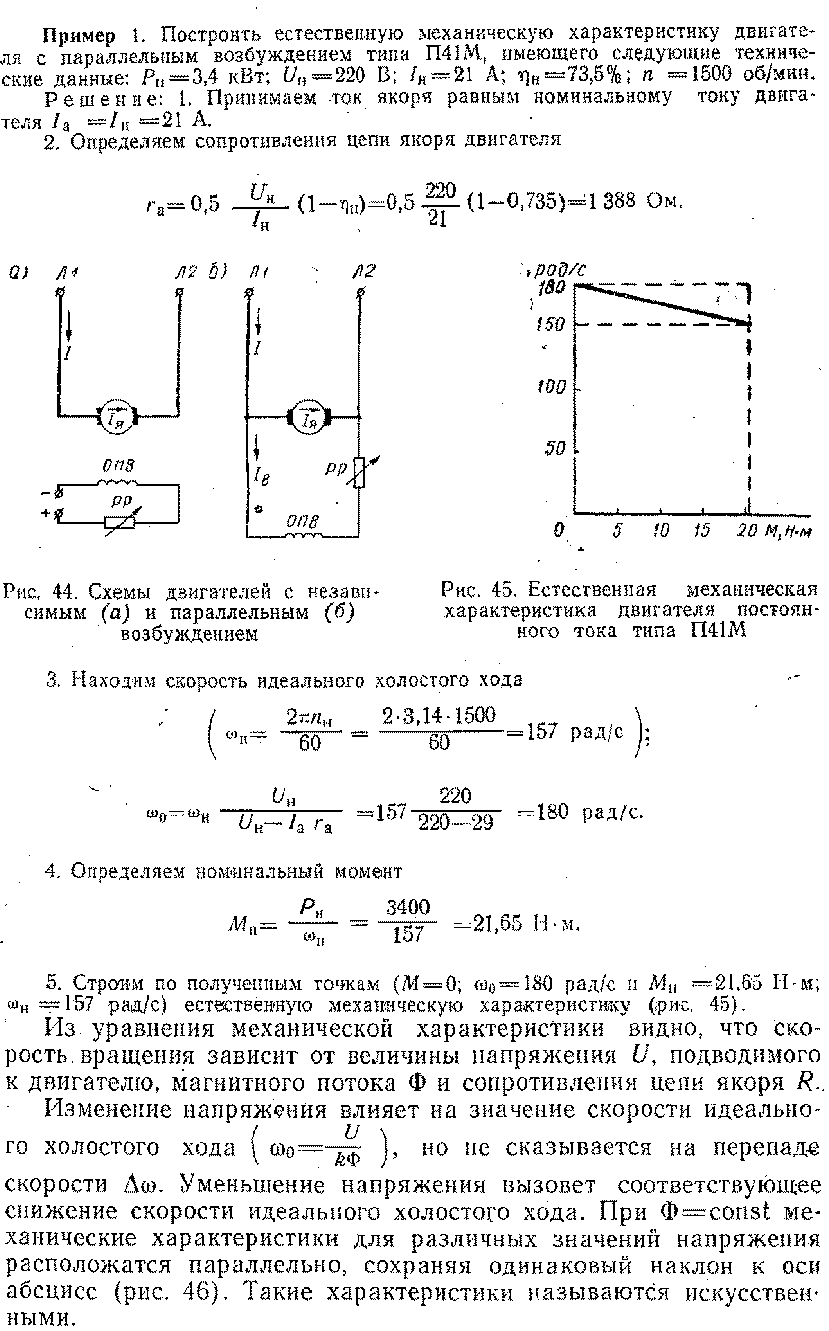
Кроме того, различают механические характеристики естественные и искусственные. Естественную механическую характеристику строят при номинальных значениях напряжения и магнитного потока двигателя и отсутствии в цепи его якоря добавочных сопротивлений.
Искусственную механическую характеристику строят для условий, отличных от номинальных, например, введение в цепь якоря двигателя постоянного тока или в цепи фазного ротора асинхронного двигателя дополнительных сопротивлений, отклонение величины напряжения, подводимого к двигателю, от номинальной, изменение величины тока возбуждения (величины магнитного потока) у двигателей постоянного тока и т. д.
Рассмотрим электромеханические характеристики двигателей постоянного тока. При вращении якоря двигателя в магнитном поле полюсов в его обмотке наводится электродвижущая сила (противоэ.д.с.), величина которой определяется уравнением
Полученное уравнение называется скоростной характеристикой двигателя.
Вращающий момент на валу двигателя определяется уравнением
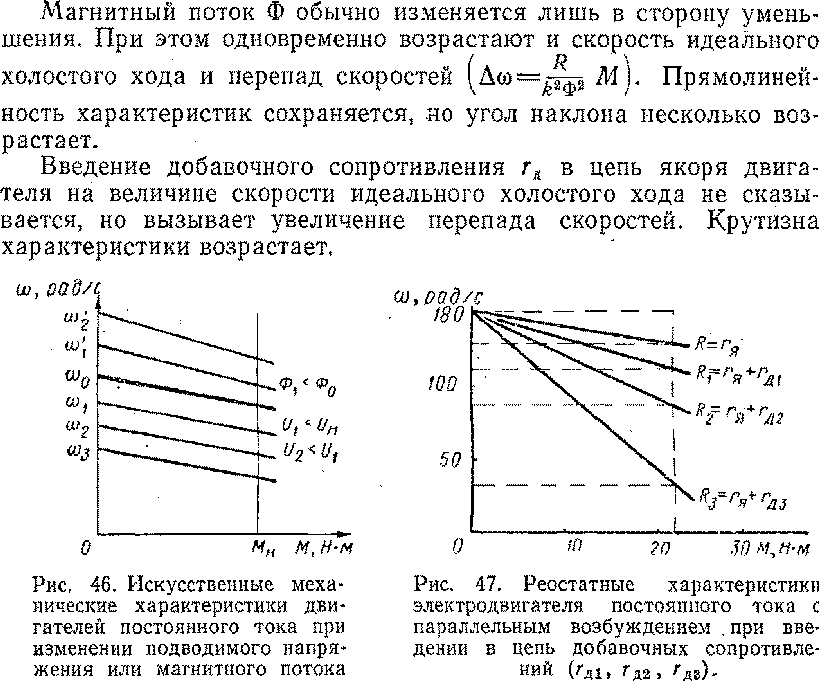
Вводя в цепь якоря различные по величине добавочные сопротивления, можно получить семейство искусственных механических реостатных характеристик с различной степенью жесткости. При этом все характеристики будут проходить через одну общую для них точку на оси ординат, соответствующую скорости идеального холостого хода (рис. 47).
Угловая скорость вращения электродвигателя при введении в цепь его якоря добавочного сопротивления гд может быть вычислена по формуле

Магнитный поток пропорционален квадрату тока якоря. Следовательно, при увеличении тока нагрузки вращающий момент двигателя резко возрастает. В то же время увеличение момента сопротивления на валу двигателя сопровождается сравнительно небольшим ростом тока в цепи якоря.
Введение в цепь якоря двигателя с последовательным возбуждением добавочных сопротивлений приводит к уменьшению скорости двигателя, характеристики смещаются вниз и мягкость их увеличивается (рис. 48,б). Особенностью механических характеристик такого двигателя является отсутствие режима идеального холостого хода.
При нагрузке I=0 магнитный поток Ф≈0 и в соответствии с уравнением скоростной характеристики скорость вращения двигателя стремится к бесконечности. Поэтому двигатель с последовательным возбуждением нельзя пускать на холостом ходу и с нагрузкой менее 25% номинальной.
Способность двигателей с последовательным возбуждением развивать большие вращающие моменты при малых скоростях вращения, и наоборот, большие скорости при малых моментах обусловила их использование в тяговых и подъемно-транспортных механизмах.

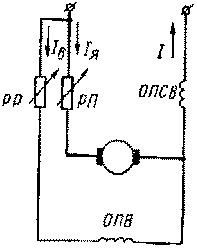
Рис. 49. Схема двигателя со смешанным возбуждением
Двигатели со смешанным возбуждением имеют две обмотки возбуждения — параллельную и последовательную (рис. 49), и их результирующий магнитный поток создается магнитодвижущими силами обеих обмоток.
При согласном включении обмоток результирующий магнитный поток равен![]() , при встречном
, при встречном![]() . Наиболее распространено согласное включение обмоток.
. Наиболее распространено согласное включение обмоток.
Из-за ряда трудно учитываемых факторов для механической характеристики двигателей со смешанным возбуждением аналитического выражения нет. Пользуются универсальными характеристиками, в которых графические зависимости скорости вращения и момента от тока нагрузки выражены в относительных единицах. Зная номинальные данные двигателя, всегда можно построить его механические характеристики на основании универсальных характеристик.