§ 45. ЭЛЕКТРОПРИВОДЫ ШПИЛЯ И БРАШПИЛЯ И ИХ СИСТЕМЫ УПРАВЛЕНИЯ
Якорно-швартовные механизмы (брашпили и шпили) предназначены для постановки судна на якорь и снятия его с якоря, а также для выполнения швартовных операций.
Брашпили имеют горизонтальный вал, на котором свободно посажены два кулачковых барабана — цепные звездочки, служащие для подъема якорей и соединенные через кулачковые муфты с приводом. Кулачковые барабаны могут работать раздельно, каждый на свой якорь, и одновременно, что позволяет выбирать сразу якоря обоих бортов. На концах промежуточного вала брашпиля обычно устанавливают швартовные барабаны (турачки) для выполнения швартовных операций.
В качестве исполнительных двигателей применяют двигатели постоянного тока серий ПНЗ, ПБ, ДПМ, а также многоскоростные асинхронные двигатели типа МАП.
Различают брашпили с одним двигателем и с двумя двигателями, работающими на один вал.
Брашпили комплектно со всем оборудованием, к ним относящимся, находятся на палубе в носовой части судна.
Шпиль имеет вертикальный вал и состоит из швартовного барабана и кулачкового барабана-звездочки, установленных на баллере. Последний через зубчатую муфту соединен с грузовым колесом редуктора, который в свою очередь через эластичную фрикционную муфту связан с исполнительным двигателем.
На палубе устанавливают лишь якорно-швартовный барабан шпиля и тумбу управления; все остальное оборудование размещается в подпалубных помещениях.
Электроприводы якорно-швартовных устройств должны удовлетворять следующим требованиям:
надежность и безопасность в работе;
возможность использования при любой погоде;
возможность пуска при полной нагрузке и максимальном моменте сопротивления;
обеспечение соответствующих скоростей при подъеме якоря и подходе его к клюзу;
обеспечение необходимой скорости выбирания швартовного каната;
возможность кратковременной стоянки под током (30—60 с) при ограниченном вращающем моменте;
наличие соответствующего устройства для торможения и удержания якоря па весу при прекращении подачи напряжения к двигателю привода;
удобство и простота управления.
Моменты, возникающие на валу электродвигателя на различных стадиях выбирания якоря, изменяются в широких пределах.
При стоянке судна на якоре якорная цепь вытравлена. Часть ее лежит на грунте, часть свободно провисает и при снятии судна с якоря должна быть предварительно выбрана.
Весь процесс снятия судна с якоря может быть условно подразделен на отдельные стадии:
приведение судна на канат при постоянном моменте Μ1 на валу двигателя; на данной стадии происходит выбирание лежащей на грунте части цепи с равномерным подтягиванием судна к месту залегания якоря, при этом форма кривой свободного провисания цепи сохраняется неизменной, так как количество звеньев цепи, втянутых в клюз, равно их количеству, поднятому с грунта;
приведение судна па канат при переменном моменте м2 па валу двигателя; происходит выбирание свободно провисающей части цепи; момент постепенно возрастает от![]()
![]()
отрыв якоря от грунта при максимальном тяговом усилии у клюза; момент м3, отнесенный к валу двигателя, принимается равным![]() ;
;
подъем якоря и свободно висящей части цени; момент Mt, отнесенный к валу двигателя, резко уменьшается и, по существу, определяется усилием, создаваемым весом якоря и цепи, погруженными в воду; условно принимается, что в начале четвертой стадии момент![]() , а в конце стадии
, а в конце стадии![]()
![]()
втягивание якоря в клюз; иа этой стадии момент М5 на валу двигателя незначительно увеличивается, скорость вращения двигателя резко снижается во избежание повреждения обшивки судна при подходе якоря к клюзу.
В соответствии с механической характеристикой якорношвартовных приводов условиям их работы лучше всего удовлетворяют электродвигатели с мягкой естественной характеристикой: при постоянном токе — двигатели постоянного тока со смешанным (с легкой параллельной обмоткой) и с последовательным возбуждением, при переменном токе — асинхронные электродвигатели с короткозамкнутым ротором, многоскоростные (двух- и трехскоростные) и асинхронные электродвигатели с фазным ротором.
На судах внутреннего плавания широко применяют контроллерные и контакторные системы управления электрическими приводами швартовно-якорных устройств.
К достоинствам контроллерных схем относятся их простота и надежность. Однако эти схемы не обеспечивают автоматического ограничения момента в случае возрастания нагрузки при отрыве якоря от грунта, контроллеры имеют большую массу и для управления ими необходимы значительные усилия. Кроме того, к контроллерам подводятся цепи главного тока, что усложняет управление электроприводами на расстоянии.
Контакторные схемы управления отличаются большой сложностью соединений, громоздки и стоят дорого. Распространенная на речных судах схема контроллерного управления, применяемая в электроприводах брашпилей и шпилей на грузовых теплоходах грузоподъемностью 2000 т, на буксирных теплоходах мощностью 600 л. с., на речных дизель-электрических ледоколах, на танкерах грузоподъемностью 3300 т и других судах, показана на рис. 86, а.
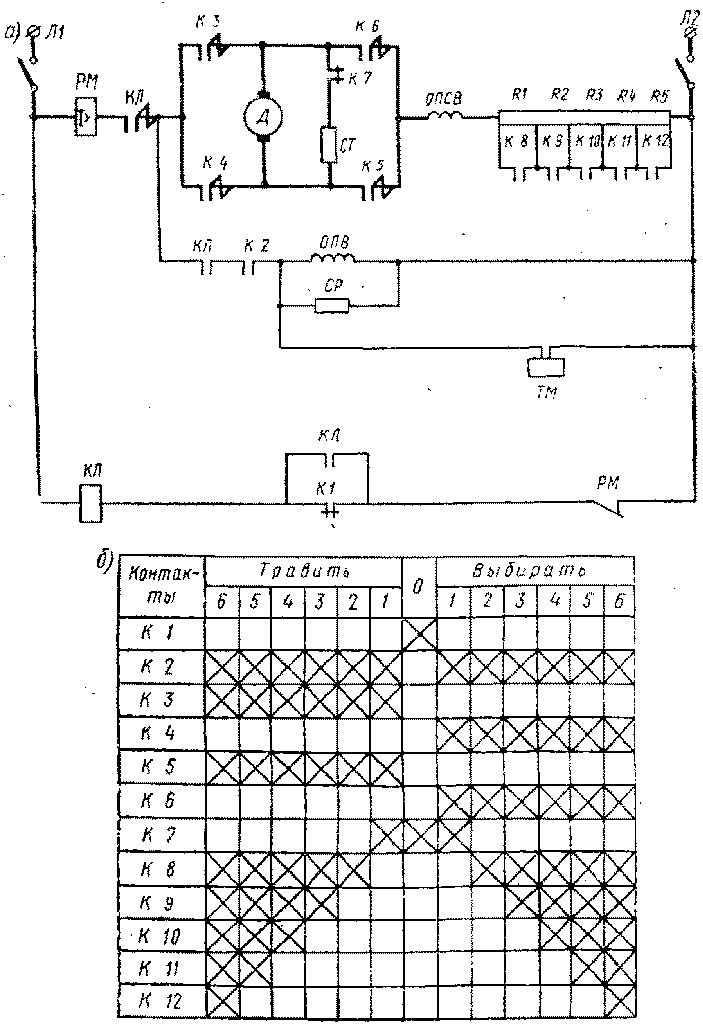
Рис. 86. Контроллерная схема управления брашпильного привода (а) и таблица замыкания контактов контроллера (б)
Основные элементы схемы: электродвигатель постоянного тока со смешанным возбуждением, контроллер кулачкового типа водозащищенного исполнения с шестью рабочими положениями в каждую сторону и встроенными в него линейным контактором КЛ и максимальным реле РМ, тормозной электромагнит с параллельной втягивающей катушкой ТМ и встроенным разрядным резистором СР, ящик с пускорегулировочными резисторами R1—R5.
Пуск двигателя производится последовательным шунтированием секций пускорегулировочного реостата. Особенность схемы заключается в том, что в положении 1 рукоятки контроллера параллельно якорю включен тормозной резистор СТ, выполняющий функцию шунтирующего сопротивления. Это позволяет снизить скорость, развиваемую двигателем, в 3—4 раза и обеспечивает постепенное втягивание якоря в клюз.
Схема работает так. При включении цепи управления под напряжение получает питание катушка линейного контактора КЛ, контактор замыкает главный контакт КЛ в цепи якоря двигателя, блок-контакт КЛ в цепи параллельной обмотки ОПВ двигателя и блок-контакт КЛ, закорачивающий контакт К1 контроллера. Контакт К1 замкнут в нулевом положении контроллера и разомкнут во всех остальных (см. таблицу замыкания контактов контроллера, рис. 86,б). Схема к пуску готова.
При повороте маховичка контроллера в положение 1, например Выбирать, замыкаются контакты К4 и К6 контроллера в цепи главного тока и контакт К2 в цепи параллельной обмотки ОПВ двигателя и катушки электромагнитного тормоза ТМ. Обмотка возбуждения включается под полное напряжение сети, одновременно двигатель растормаживается. Якорь электродвигателя подключается к сети через все пускорегулировочные резисторы. Кроме того, его шунтирует резистор СТ, так как контакт К7 контроллера в положении 1 остается закрытым. Якорь электродвигателя приходит во вращение.
В положении 2 маховичка контроллера замыкается контакт К8, закорачивающий первую ступень пускорегулировочного реостата. Одновременно размыкается контакт К7 и резистор СТ отключается. Двигатель увеличивает скорость вращения.
При повороте маховичка в положения 3, 4, 5 и 6 последовательно замыкаются контакты К9, К10, К11, К12 контроллера и постепенно закорачиваются вторая, третья, четвертая и пятая ступени пускорегулировочного реостата. В положении 6 маховичка все ступени пускорегулировочного реостата закорочены и двигатель переходит на работу по естественной характеристике.
В положении 1 Травить маховичка контроллера замкнутся контакты К3 контроллера и К5 в цепи якоря двигателя, а также контакт К2 в цепи его возбуждения. В результате замыкания контактов К3 и К6 (вместо контактов К4 и К6 в положении Выбирать) изменяется направление тока в цепи якоря и двигатель начинает вращаться в обратном направлении. В остальных положениях маховичка контроллера происходит последовательное шунтирование пускорегулировочных ступеней реостата. Пускорегулировочные резисторы рассчитаны на длительное нахождение под током и используются для регулировки скорости вращения двигателя. Так, при выполнении операции «Отрыв якоря от грунта» маховичок контроллера ставят в положение 3. При этом в цепь якоря двигателя вводятся три. ступени пускорегулировочного реостата, ограничивая этим ток якоря до 1,8Iн. Момент, развиваемый двигателем, будет около 2Мн.
Если момент сопротивления со стороны механизма больше момента вращения, развиваемого двигателем, то двигатель останавливается, находясь во включенном, состоянии (стоянка под током). Время стоянки под током не должно превышать 1 мин.
Операция «Втягивание якоря в клюз» выполняется в положении 1 маховичка контроллера. При этом в цепь якоря введен весь пускорегулировочный реостат и якорь зашунтирован резистором СТ. Двигатель развивает скорость порядка 0,25 номинальной и момент около 0,8Мн (ток в сети около 1,2Iн).
Для защиты двигателя от больших перегрузок предназначено реле максимального тока РМ с уставкой тока 2,3I. Минимальная защита и нулевая блокировка осуществляются линейным контактором КЛ, размыкающим при снижении напряжения сети на 50% номинального свои контакты и таким образом отключающим двигатель от сети.
В схеме управления, наряду с торможением, производимым электромагнитным тормозом, предусмотрено электродинамическое торможение, при котором в нулевом положении контроллера якорь замкнут на тормозной резистор СТ.
Схема электропривода шпиля подобна описанной схеме управления электропривода брашпиля. Различие в этих схемах заключается в том, что в схеме управления электропривода шпиля пускорегулировочный резистор имеет меньшее число ступеней, соответственно меньшее число фиксированных положений в обе стороны будет и у контроллера.
Схема контакторного управления электропривода брашпиля показана на рис. 87. Она подобна рассмотренным выше системам контакторного управления рулевых электроприводов.
Двигателем управляют с помощью командоконтроллера, имеющего по четыре положения в обе стороны от нулевого. Пуск двигателя производится в функции времени. Выдержка времени создается контакторами с выдержкой времени, шунтирующими последовательно две ступени пускового реостата.
Основные элементы схемы: двигатель постоянного тока со смешанным возбуждением, пускорегулировочные R1 и R2, тормозной СТ, дополнительный СД и разрядный СР резисторы, линейный контактор КЛ, реверсивные двусторонние контакторы направления с параллельными катушками КВ, КН и последовательными катушками КВ1, КН1, контактор торможения КТ, два контактора ускорения с удерживающими ТУ1, ТУ2 и втягивающими ТВ1, ТВ2 катушками, реле напряжения РВ, грузовое реле РГ, реле максимального тока РМ.

Рис. 87. Контакторная схема управления брашпильного электропривода в функции времени
Подготовка схемы к работе производится включением коммутационного прибора. Рукоятка командоконтроллера устанавливается в среднее положение (нулевое). При включении цепи управления под напряжение получают питание обмотка параллельного возбуждения ОПВ двигателя, удерживающая катушка контактора ТУ1 первой ступени ускорения, которая разомкнет контакт ТУ1 в цепи втягивающей катушки ТВ1 и замкнет контакт ТУ1 в цепи удерживающей катушки ТУ2 контактора второй ступени, реле напряжения PH, которое своим замыкающим контактом PH зашунтирует контакт К1 командоконтроллера.
Пуск и управление двигателем осуществляются постепенным переводом рукоятки командоконтроллера в положения 1—4. Если рукоятка командоконтроллера будет без задержки в промежуточных положениях сразу переведена в последнее положение, пуск двигателя все равно производится контакторами с заданной выдержкой времени. Это предотвращает возможные ошибки при излишне поспешном переводе рукоятки управления из одного положения в другое.
При переводе рукоятки командоконтроллера в положение 1 Выбирать замкнутся контакты К2, К4 и получат питание удерживающая катушка ТУ2 контактора ускорения второй ступени, который разомкнет контакт ТУ2 в цепи своей втягивающей катушки ТВ2, и параллельная катушка контактора направления КВ. Последний один свой силовой контакт КВ в главной цепи замкнет, другой разомкнет, что подготовит вращение двигателя в определенном направлении, замкнет блок-контакт КВ и этим включит под напряжение линейный контактор КЛ и разомкнет блок-контакт КВ в цепи контактора направления КН (электрическая блокировка).
Линейный контактор, включенный под напряжение, замкнет главный контакт КЛ в цепи главного тока, в результате чего двигатель начнет разгон по искусственной характеристике с включенным параллельно его якорю резистором СТ, замкнет блок-контакт КЛ, зашунтирующий добавочный резистор СД в цепи обмотки возбуждения ОПВ, разомкнет контакт КЛ в цепи удерживающей катушки ТУ1. Удерживающая катушка контактора с заданной выдержкой времени, после ослабления ее магнитного потока, отпустит якорь и закроется контакт ТУ1 в цепи втягивающей катушки ТВ1.
При переводе рукоятки командоконтроллера в положение 2 замкнется дополнительно контакт К3 и получит питание контактор торможения КТ, который разомкнет контакт КТ и отключит резистор СТ. Двигатель перейдет на работу по второй искусственной характеристике.
Перевод рукоятки контроллера в положение 3 вызовет замыкание контакта К6 в дополнение к уже замкнутым контактам. Получит питание втягивающая катушка ТВ1 контактора и закроет контакт ТВ1, шунтирующий резистор R2 в цепи якоря двигателя. Двигатель переходит на работу по третьей искусственной характеристике. Одновременно разомкнется контакт ТУ1 в цепи удерживающей катушки ТУ2. Катушка лишится питания. Ее магнитное поле с заданной выдержкой времени исчезнет и замкнется контакт ТУ2 в цепи втягивающей катушки ТВ2 контактора второй ступени ускорения.
Теперь, при переводе рукоятки командоконтроллера в положение 4 и замыкании контакта К7 получит питание втягивающая катушка ТВ2, которая замкнет контакт ТВ2 и таким образом выведет из цепи якоря двигателя резистор R1. Двигатель перейдет на работу по естественной характеристике.
Для реверсирования двигателя рукоятку командоконтроллера сначала возвращают в нулевое положение, а затем последовательно переводят в положения 1—4. В положении 1 Травить вместо контакта К4 замыкается контакт К5 и под напряжение включается параллельная (втягивающая) катушка КН контактора направления Травить. Однако контактор может сработать лишь после того, как рабочий и тормозной токи в цепи якоря- двигателя снизятся до нуля и двигатель остановится. До этого последовательная (удерживающая) катушка КН1 контактора, находящаяся в тормозном контуре якоря двигателя, не дает втягивающей катушке притянуть якорь прибора к своему сердечнику и вызвать замыкание одних и размыкание других контактов контактора.
После остановки двигателя контактор срабатывает и дальнейший пуск двигателя происходит в уже описанном порядке.
В схеме предусмотрена защита двигателя от перегрузки. При токе в цепи якоря, равном 21 а, срабатывает грузовое реле РГ и размыкает свой контакт РГ в цепи втягивающих катушек ТВ1, ТВ2. Лишившись питания, катушки размыкают контакты ТВ1 и ТВ2, шунтирующие пускорегулировочные резисторы R1 и R2. В цепь якоря двигателя вводятся сопротивления, и ток в цепи уменьшается.
При исчезновении перегрузки реле РГ вновь замыкает контакт РГ. Втягивающие катушки контакторов получают питание и, замыкая контакты ТВ1, ТВ2, шунтируют резисторы R1 и R2.
Ввод якоря в клюз производится при минимальной скорости вращения двигателя. Рукоятка командоконтроллера устанавливается при этом в положение 1. В данном положении двигатель работает на первой реостатной характеристике с. введенными в цепь якоря обоими пускорегулировочными резисторами и включенным, параллельно обмотке якоря резистором СТ.
Максимальная защита осуществляется реле максимального тока РМ, настраиваемым на ток срабатывания (2,5—3)Iн.
Для минимальной защиты и нулевой блокировки предназначено реле PH.
На переменном, токе в электроприводах брашпилей и шпилей широко используются двухскоростные двигатели с контроллерным и контакторным пуском. Принципиальная схема контроллерного управления электропривода брашпиля с двухскоростным асинхронным двигателем, примененная на грузовых теплоходах типа «Волго-Дон», изображена на рис. 88.
Основные элементы схемы: двухскоростной двигатель с короткозамкнутым ротором, кулачковый контроллер на два положения в обе стороны, линейный контактор КЛ, тепловые реле РТ1, РТ2, РТ3 и РТ4, электромагнитный тормоз ТМ, сигнальная лампа ЛБ, аварийная кнопка АК, выключатель ВК.
Схема работает следующим образом. При повороте пакетного выключателя получает питание катушка линейного контактора КЛ, контактор замыкает главные контакты КЛ в цепи статора двигателя и блок-контакт КЛ, шунтирующий контакт К1 контроллера. Схема подготовлена к пуску. Загорается сигнальная лампа ЛБ.
При повороте рукоятки (маховика) контроллера в положение 1, например Выбирать, размыкается контакт К1 и замыкаются контакты К2, К5, К6, К7, К8 контроллера. Двигатель подключается к сети и начинает вращаться в режиме Выбирать с малой скоростью.

Рис. 88. Принципиальная схема контроллерного управления электропривода брашпиля с двухскоростным электродвигателем
В положении 2 рукоятки (маховика) останутся замкнутыми контакты К2, К5, в то же время разомкнутся контакты К6, К7, К8 и замкнутся контакты К9, К10, К11 контроллера. В результате произойдет переключение фаз статорной обмотки со схемы малой скорости на схему большой скорости.
Для перемены направления вращения двигателя и перехода на режим Травить рукоятка контроллера поворачивается в обратном по отношению к нулевому положению направлении. В этом случае вместо контактов К2 и К5 замкнутся контакты К3 и К4. Произойдет переключение фаз (фазы А на фазу С, фазы С на фазу А), и двигатель изменит направление вращения.
Переключение скоростей (числа пар полюсов) производится в описанном порядке — в положении 1 рукоятки контроллера замкнутся контакты К6, К7, К8 и обмотка статора будет включена по схеме малой скорости, в положении 2 рукоятки контроллера замкнутся контакты К9, К10, К11 и фазы обмотки статора будут включены по схеме большой скорости.
В схеме предусмотрена защита от перегрузок с помощью тепловых реле и нулевая защита (от повторного включения) посредством линейного контактора.
Схема контакторного управления электропривода брашпиля показана на рис. 89.

Рис. 89. Принципиальная схема контакторного управления двухскоростным двигателем брашпильного электропривода
Основные элементы схемы: двухскоростной асинхронный двигатель с короткозамкнутым ротором и встроенным дисковым тормозом, магнитная станция с контакторами направления КВ и КН, контакторами скорости — малой КМ и большой КВ, контактором тормоза КТ, реле напряжения PH и тепловыми реле РТ1— РТ4 с самовозвратом.
Схема работает так. В положении 0 при включении выключателя управления ВУ получает питание катушка реле напряжения PH. Последнее замкнет свой контакт PH, шунтирующий контакт K1 командоконтроллера. Таким образом будет включена нулевая защита схемы.
При повороте рукоятки командоконтроллера в положение 1, например Травить, замкнутся контакты К3 и К4. Под напряжением окажутся катушки контактора направления КН и контактора скорости КМ. Контактор КН замкнет свои главные контакты КН в цепи статора двигателя и разомкнет блок-контакт КН в цепи контактора КВ. Хотя между контакторами направления КН и КВ имеется механическая блокировка, исключающая возможность их одновременного включения, в схеме предусмотрена также электрическая блокировка, для чего в цепь катушки контактора КН включен размыкающий блок-контакт КВ контактора направления КВ, а в цепь катушки контактора направления КВ — размыкающий блок-контакт КН контактора направления КН.
Одновременно с контактором направления сработает контактор скорости КМ, который замкнет свои главные контакты КМ в цепи статора двигателя, включив таким образом его в сеть. Кроме того, контактор КМ замкнет свой блок-контакт КМ в цепи тормозного контактора КТ и разомкнет блок-контакт КМ в цепи контактора скорости КБ.
Контактор КТ замкнет свои контакты КТ в цепи катушки электромагнитного тормоза, двигатель растормозится и разовьет скорость вращения, соответствующую малой скорости.,
Для перевода двигателя на большую скорость рукоятку командоконтроллера перемещают в положение 2. При этом замыкается его контакт К6 и размыкается контакт К4. Контакт К3 остается замкнутым. В результате размыкания контакта К4 отключается катушка контактора малой скорости КМ. Контактор размыкает свои главные контакты КМ в цепи статора двигателя, замыкает блок-контакт КМ в цепи контактора скорости КБ и размыкает блок-контакт КМ в цепи тормозного контактора.
Одновременно контактор скорости КБ, оказавшись под напряжением, замыкает свои главные контакты КБ в цепи статора двигателя и блок-контакт КБ в цепи тормозного контактора КТ и размыкает блок-контакт КБ в цепи контактора скорости КМ.
Для изменения направления вращения двигателя рукоятку командоконтроллера переводят в положение Выбирать. При этом замыкаются контакты К2, К4 командоконтроллера и включается катушка контактора направления КВ, а катушка контактора направления КН отключается. Далее порядок работы схемы подобен описанному.
Выключатель управления ВУ предназначен для экстренного отключения двигателя, а также для выключения схемы управления привода в нерабочем положении.
В схеме предусмотрена минимальная и тепловая защита. Минимальная защита осуществляется нулевым реле PH, защита от перегрузки — тепловыми реле с самовозвратом, контакты которых РТ1—РТ4 включены в цепь катушки нулевого реле. Возврат контактов тепловых реле в исходное положение производится специальными электромагнитами.
При аварийном режиме, когда двигатель останавливать нельзя, во избежание срабатывания тепловых реле их контакты могут быть закорочены аварийной кнопкой АК.