§ 35. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Вращающий момент асинхронного двигателя пропорционален магнитному потоку, току в обмотке ротора и зависит от косинуса угла сдвига фаз между э.д.с. и током в обмотке ротора
![]()
где k — постоянная машины;
![]()
где s — скольжение.
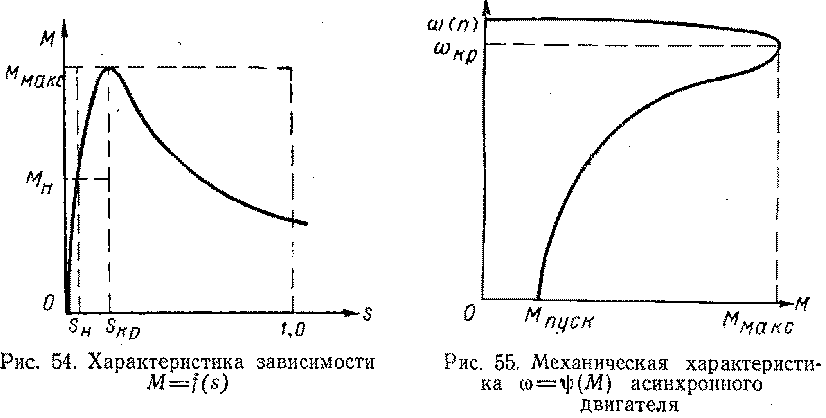
В начале пуска (s≈l) косинус угла сдвига фаз мал, так как индуктивное сопротивление х2 имеет наибольшую величину, поэтому вращающий момент сравнительно невелик, несмотря на то, что пусковой ток больше номинального в 4—7 раз. По мере разгона двигателя индуктивное сопротивление уменьшается и cosφ2 растет. Момент при этом увеличивается, достигая наибольшего значения при так называемом критическом скольжении sкp. Зависимость момента от скольжения M=f(s) представлена на рис. 54. Эта зависимость называется механической характеристикой асинхронного двигателя.
Для построения механической характеристики можно воспользоваться упрощенным уравнением


В пределах рабочей части механическая характеристика асинхронных двигателей довольно жесткая.
При введении в цепь ротора асинхронного двигателя с фазным ротором добавочных сопротивлений Rд1 и Rд2 т. д. можно получить семейство искусственных механических (реостатных) характеристик (рис. 56,а), мягкость (крутизна) которых увеличивается с ростом величины добавочных сопротивлений ![]() . При этом величина максимального момента
. При этом величина максимального момента![]() остается неизменной, а пусковой момент Мпуск увеличивается. При _
остается неизменной, а пусковой момент Мпуск увеличивается. При _![]() пусковой момент становится равным максимальному
пусковой момент становится равным максимальному![]()

Рис. 56. Семейство искусственных характеристик асинхронных двигателей
Изменение величины подводимого к двигателю напряжения вызывает резкое уменьшение максимального момента,который, как известно, пропорционален квадрату напряжения![]() . При этом значение критической скорости ωκρ остается неизменным (рис. 56,б). Происходит значительное снижение пускового момента, вследствие чегo пуск двигателя возможен лишь при небольших нагрузках на валу.
. При этом значение критической скорости ωκρ остается неизменным (рис. 56,б). Происходит значительное снижение пускового момента, вследствие чегo пуск двигателя возможен лишь при небольших нагрузках на валу.
§ 36. УСЛОВИЯ ПУСКА И РЕВЕРСИРОВАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Пуск асинхронных двигателей сопровождается переходным процессом, длящимся от момента включения двигателя в сеть до достижения им установившейся скорости вращения. Процесс характеризуется кратностью пускового тока ![]() и кратностью
и кратностью
пускового момента![]() .
.
В начальный момент пуска асинхронные электродвигатели серий А2 и АО2 развивают пусковой ток, превышающий номинальный в 4—7 раз. Сам по себе этот ток для изоляции обмоток машин по условиям нагрева не опасен ввиду его кратковременности, но вызываемое им падение напряжения в сети может нарушить работу остальных потребителей. В судовых условиях мощность крупных асинхронных двигателей может быть соизмерима с мощностью судовых генераторов, поэтому приходится принимать меры по снижению пусковых токов. Непосредственно можно включать в сеть лишь двигатели небольшой мощности.
Выше отмечалось, что пусковой момент асинхронных двигателей относительно невелик, вследствие низкого значения косинуса угла сдвига фаз между э.д.с. и током ротора. Кратность пускового момента Км у асинхронных двигателей серии А2 и АО2 равна 1,1—1,2 и лишь у двигателей с повышенным пусковым моментом серии АОП2 она повышается до 1,7—1,6.
С целью снижения пусковых токов и отчасти повышения пускового момента двигатели пускаются при пониженном напряжении путем включения на время пуска в цепь статора активных сопротивлений, переключения обмоток статора со звезды на треугольник; включения через автотрансформатор, включения в цепь статора дросселей насыщения, включения в цепь ротора пусковых сопротивлений (для двигателей с фазным ротором).
Пуск асинхронного электродвигателя с введением в цепь статора активного сопротивления основан на снижении подводимого к двигателю напряжения на величину падения напряжения на активном сопротивлении. Величина пускового тока при этом уменьшается, однако одновременно уменьшается и момент двигателя. При снижении напряжения на 20% (0,8 Un) момент сокращается почти до 64%. После разгона двигателя активное сопротивление отключается.
Переключение обмоток статора со звезды (пусковое положение) на треугольник (рабочее положение) может быть применено только для двигателей, работающих при соединении их статорных обмоток в треугольник. В момент пуска, при соединении обмоток в звезду, фазное напряжение уменьшается в √3 раза, а пусковой ток и пусковой момент — в 3 раза.

Рис. 57. Пуск двигателей, с применением автотрансформатора (а) и дросселя насыщения (б)
С помощью автотрансформатора (рис. 57, а) можно производить плавный пуск асинхронных двигателей путем по степенного повышения напряжения до его номинальной величины.
Пуск двигателей с применением дросселей насыщения (рис. 57, б) основан на создании дополнительного падения напряжения на реактивном сопротивлении дросселя. В момент включения двигателя индуктивное сопротивление дросселя велико, в его рабочих обмотках создается значительное падение напряжения и к зажимам двигателя подводится пониженное напряжение. По мере разгона двигателя и уменьшения пускового тока снижается падение напряжения в рабочих обмотках дросселя Др, увеличиваются напряжение, подводимое к двигателю, и ток в управляющей обмотке ОУ дросселя. Возрастает насыщение магнитной системы дросселя, что, в свою очередь, приводит к снижению его индуктивного сопротивления и дальнейшему увеличению напряжения на зажимах двигателя, почти до номинального.
Управляющая обмотка дросселя питается постоянным током через трансформатор Тр и выпрямитель ВС. Величина тока в цепи обмотки управления регулируется подстроечным резистором ПР.
Все описанные способы. пуска асинхронных двигателей применимы только при сравнительно легких условиях пуска на холостом ходу или при нагрузке, не превышающей 25% номинальной.
В электроприводах с тяжелыми условиями пуска для получения более высокого пускового момента следует использовать асинхронные двигатели с повышенным пусковым моментом (АОП2), с повышенным скольжением (АОС2) и специального назначения.
Значительно более благоприятные условия пуска у асинхронных двигателей с фазным ротором. Пуск двигателей производится постепенным, по мере разгона двигателя, выводом из цепи его ротора пусковых сопротивлений.
Включение активных сопротивлений в фазы ротора уменьшает величину пускового тока и способствует повышению пускового момента.
Механические характеристики асинхронного двигателя с фазным ротором в зоне устойчивой работы практически прямолинейны. Поэтому разгон двигателя при пуске и расчет ступеней пускового сопротивления производят так же, как и у двигателей постоянного тока с параллельным возбуждением (см. рис. 50). Так как в каталогах внутреннее сопротивление фазы ротора может отсутствовать, оно может быть вычислено с достаточной для практических целей точностью по формуле


Реверсирование асинхронных двигателей производится переменой местами любых двух фаз питающей сети.
§ 37. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Из уравнения скорости асинхронного двигателя
![]()
видно, что скорость его может регулироваться изменением величины скольжения s, частоты f1 и числа пар полюсов р.
Регулирование скорости вращения искусственным изменением величины скольжения возможно, как это следует из механических характеристик двигателя с фазным ротором, введением в цепь ротора добавочных сопротивлений.
В цепи ротора добавочное сопротивление увеличивает скольжение s, иначе говоря, вызывает уменьшение скорости вращения. Момент остается неизменным. Этот способ регулирования скорости неэкономичен, так как связан со значительными тепловыми потерями. Ориентировочно можно считать, что потери равны подведенной мощности двигателя Р1, умноженной на величину скольжения![]()
Полезная мощность двигателя уменьшается вследствие снижения угловой скорости вращения при постоянном моменте нагрузки![]() . Соответственно уменьшается и к. п. д. двигателя.
. Соответственно уменьшается и к. п. д. двигателя.
Кроме того, пределы регулирования сравнительно невелики 10—20% от номинальной угловой скорости. При больших пределах регулирования работа двигателей становится неустойчивой.
Регулирование скорости вращения изменением частоты представляет известные трудности, так как требует изменения скорости вращения генератора или установки для каждого привода специального преобразователя частоты с достаточно широкими пределами изменения частоты генерируемого им переменного тока.
Чтобы перегрузочная способность двигателя и жесткость его механической характеристики оставались неизменными, необходимо поддерживать постоянным отношение![]()
В дальнейшем, в связи с развитием полупроводниковой техники, регулирова’ние угловой скорости вращения асинхронных двигателей изменением частоты получит большое распространение.
При регулировании скорости вращения изменением числа пар полюсов скорость -уменьшается обратно пропорционально их числу. Однако этот способ приемлем только для асинхронных двигателей с короткозамкнутым ротором.
Для получения различного числа пар полюсов двигатель должен иметь несколько обмоток, соответственно ступеням скорости, или его фазные обмотки должны состоять минимум из двух частей (катушек), которые можно соединять последовательно или параллельно (рис. 59).
При последовательном соединении частей фазной обмотки вращающееся магнитное поле имеет четыре полюса, при параллельном — два. Статорные обмотки переключаются при сохранении постоянного момента с одиночной звезды на двойную или при постоянной мощности с треугольника на двойную звезду.
Когда необходимо получить три или четыре ступени скорости, в статоре двигателя укладываются две независимые обмотки.
К недостаткам описанного способа регулирования скорости вращения асинхронного двигателя относятся:
ступенчатость регулирования 4 : 1 у двухскоростных двигателей;
неизбежные резкие броски тока и момента при переходе от одной скорости к другой, вследствие разрыва цепи статора при переключении;
снижение коэффициента мощности двигателя при работе на более низких скоростях вращения.
Однако такой способ достаточно прост и получил широкое распространение.
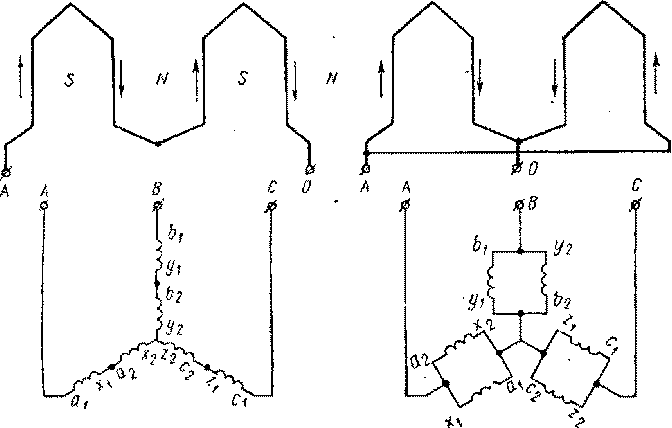
Рис, 59. Переключение фазных обмоток статора для получения разного числа полюсов вращающегося магнитного поля
§ 38. ТОРМОЖЕНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
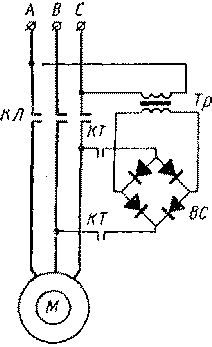
Рис. 60. Динамическое торможение асинхронных двигателей
Способы торможения асинхронных двигателей те же, что и двигателей постоянного тока: электродинамический, с отдачей энергии в сеть (рекуперативный) и противовключением.
При электродинамическом торможении (рис. 60) обмотка статора отключается от сети (размыкаются контакты КЛ линейного контактора) и подключается к источнику постоянного тока (замыкаются контакты КТ тормозного контактора). Постоянный ток получают от полупроводникового выпрямителя ВС, подключенного через понижающий трансформатор Тр к бортовой сети переменного тока.
Проходя по обмотке статора, постоянный ток создает неподвижное магнитное поле, наводящее э. д. с. в обмотке вращающегося ротора.
В цепи ротора протекает ток, который, взаимодействуя с неподвижным магнитным полем статора, создает тормозной момент. У двигателей с фазным ротором обмотка ротора замыкается накоротко или в цепь его включаются сопротивления. При этом возникает максимальный тормозной момент при высоких скоростях. У двигателей с короткозамкнутым ротором этого сделать нельзя и процесс динамического торможения протекает в более тяжелых условиях.
Динамическое торможение сопряжено со значительными потерями энергии, правда, с меньшими, чем при торможении противовключением. Этот вид торможения достаточно широко применяется в судовых электроприводах.
Постоянный ток для питания обмоток статора двигателей при торможении получается путем преобразования с помощью полупроводниковых выпрямителей переменного тока общесудовой электрической сети.
В режиме торможения с отдачей энергии в сеть ротор двигателя под действием внешнего момента вращается в направлении вращения магнитного поля со скоростью, превышающей синхронную. При этом э.д.с. становится больше напряжения. Двигатель начинает работать в генераторном режиме параллельно с сетью, отдавая ей энергию. Машина развивает тормозной момент.
У асинхронных двигателей с фазным ротором генераторный режим может быть создан искусственно введением в цепь ротора активного сопротивления.
Способ генераторного торможения экономичен. Он широко применяется в подъемно-транспортных устройствах при спуске грузов.
Однако при генераторном торможении нельзя осуществить торможение до полной остановки двигателя.
Торможение противовключением производится переменой мест любых двух фаз обмотки статора, т. е. переключением двигателя на обратное вращение. При этом изменяется направление вращения магнитного поля статора. Ротор и поле вращаются в разные стороны, вследствие чего частота и напряжение в обмотке ротора значительно выше их пусковых значений. Для ограничения величины тока и одновременного увеличения тормозного момента у двигателей с фазным ротором в цепь ротора вводится значительное сопротивление. Чтобы двигатель не начал вращаться в обратную сторону, он должен быть своевременно отключен от сети, для чего в схемах управления предусматриваются автоматический контроль скорости и автоматическое отключение двигателя от сети.
У двигателей с короткозамкнутым ротором торможение противовключением применяется в основном в аварийных случаях. Так как в цепь короткозамкнутого ротора нельзя ввести ограничительное сопротивление, процесс торможения протекает в более тяжелых условиях, чем у двигателей с фазным ротором.