§ 46. ЭЛЕКТРОПРИВОДЫ ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ И СИСТЕМЫ ИХ УПРАВЛЕНИЯ
Для перемещения груза в вертикальной и горизонтальной плоскостях на судах применяют различные электрифицированные грузоподъемные механизмы и лебедки: грузовые лебедки и краны, шлюпочные лебедки, грузовые и пассажирские подъемники (лифты), трюмные перегружатели и т. д.
Большинство грузоподъемных механизмов работает в повторно-кратковременном режиме с большим числом включений в час, часть (шлюпочные лебедки) — в кратковременном режиме. Управление электродвигателями должно допускать широкое регулирование скорости. Для повышения производительности механизмов -скорость подъема грузов принимается достаточно большой (до 30-35 м/мин), но при их спуске должны обеспечиваться пониженные («посадочные») скорости.
К судовым грузоподъемным устройствам предъявляются следующие требования:
надежность и безопасность работы;
способность работать в повторно-кратковременном режиме с ПВ=25—40% и большим числом включений в час;
допускать достаточно широкую и плавную регулировку скорости вращения;
развивать высокий пусковой момент, работать при переменных нагрузках, изменяющихся от холостого хода до полной, выдерживать значительные перегрузки;
обеспечивать надежное электрическое торможение при спуске полного груза, в случае рекуперативного торможения иметь устройства для снижения рекуперативного тока.
Этим требованиям наиболее полно удовлетворяют двигатели с мягкой'механической характеристикой.
Скорость чаще всего регулируют введением добавочных сопротивлений в цепь якоря двигателя и его шунтированием.
В электроприводах лебедок и кранов применяют двигатели постоянного тока с последовательным и смешанным возбуждением (с легкой параллельной обмоткой), а также многоскоростные асинхронные двигатели.
Наибольшее распространение получили системы контроллерного и контакторного управления и, реже, управление по системе Г-Д.
Принципиальная схема контроллерного управления электропривода лебедки грузоподъемностью 1,5 т изображена на рис. 90.
Основные элементы схемы: двигатель постоянного тока со смешанным возбуждением, контроллер кулачкового типа, резисторы: пусковые R1—R5, регулировочные R6—R10, тормозной СТ, разрядные СР, добавочные СД, линейный контактор КЛ, реле скорости PC, реле напряжения PH, реле максимального тока РМ, катушка электромагнитного тормоза ТМ, кнопка «Стоп», коммутационный прибор (на ГРЩ).
Для облегчения чтения схемы на рис. 91 даны развертки схемы главной цепи и цепи возбуждения для основных положений операций Подъем и Спуск.
Схема работает следующим образом. В положении 0 рукоятки контроллера замкнуты контакты К1, К7 и К10 (см. рис. 90, таблицу замыкания контактов). При включении на ГРЩ коммутационного прибора получает питание нулевое реле PH. Оно срабатывает и контактом PH закорачивает контакт К1 контроллера.
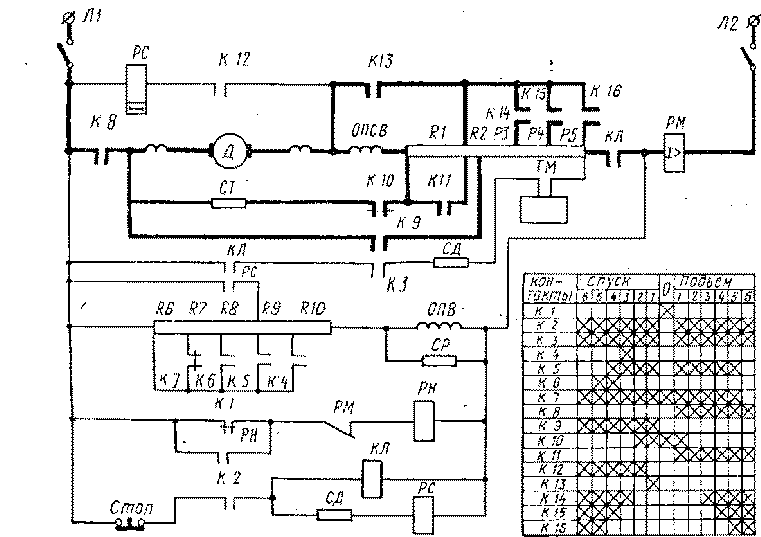
Рис. 90. Принципиальная схема контроллерного управления электропривода лебедки грузоподъемностью 1,5 т.
Кроме того, через регулировочные резисторы R7—R10 получает питание обмотка параллельного возбуждения ОПВ двигателя. Первая ступень регулировочного резистора R6 зашунтирована контактом К7 контроллера.
В положении 1 Подъем рукоятки контроллера замыкаются контакты К2, К3, К5, К8, К11, а контакт К1 размыкается. Через контакт К2 получает питание линейный контактор КЛ и замыкает свой главный контакт КЛ в цепи якоря двигателя и блок- контакт КЛ в цепи катушки тормозного электромагнита ТМ. Через контакт К3 контроллера включается под напряжение катушка электромагнитного тормоза, и двигатель растормаживается. Контакт К3 закорачивает часть регулировочного резистора R7—R8 в цепи обмотки параллельного возбуждения ОПВ. При этом обеспечивается нормальное возбуждение машины.

Рис. 91. Развертки к принципиальной схеме управления электропривода
При замыкании контактов К8 и К11 включается в сеть цепь якоря двигателя. Путь тока: Л1 — контакт К8 — якорь двигателя—обмотка возбуждения ОПСВ — контакт КП — пусковые резисторы R2, R3, R4 и R5 — контакт КЛ — реле ΡМ—Л2 — цепь, параллельная с обмоткой якоря и обмоткой возбуждения ОПСВ, — контакт К8 — тормозной резистор СТ — контакт К10 — контакт КП.
Якорь двигателя начинает вращаться. Вследствие наличия резистора СТ, включенного параллельно обмотке якоря, скорость вращения двигателя будет небольшой — около 50% номинальной.
В положении 2 рукоятки контроллера размыкается контакт К10, остальные контакты остаются замкнутыми. При размыкании контакта К10 отключается резистор СТ, шунтирующий якорь двигателя, скорость вращения увеличивается. В положениях 3—5 рукоятки контроллера последовательно замыкаются контакты К14, К15 и К10, выводящие из цепи якоря двигателя одно за другим пусковые резисторы R2, R3, R4 и R5. Двигатель переходит на работу по естественной характеристике.
В положении 6 рукоятки контроллера (на рис. 91 не показано) размыкаются контакты К5 и К7. При этом в цепь параллельной обмотки возбуждения дополнительно вводятся регулировочные резисторы R6, R7 и R8, вследствие чего поток возбуждения уменьшается, а скорость вращения двигателя увеличивается. В положении 6 производится подъем легких грузов.
При опускании груза в положении 1 рукоятки контроллера (см. рис. 90 и 91) замыкаются контакты К2, К3, К5, К9, К13 и остаются замкнутыми контакты К7, К10. Замыкание контактов К2, К3, как и при подъеме груза, вызывает срабатывание контактора КЛ и замыкание его контактов в цепи электромагнитного тормоза. Двигатель растормаживается. Замыкание контакта К5 вызывает закорачивание регулировочных резисторов R6—R8, в результате чего параллельная обмотка возбуждения ОПВ обеспечивает нормальное возбуждение машины. При этом, однако, цепь якоря двигателя в сеть еще не включается.
Замыкание контактов К9 и К13 приводит к созданию схемы электродинамического торможения двигателя. Опускание тяжелого груза под действием собственного веса вызывает вращение якоря двигателя, который, работая в режиме генератора, развивает тормозной момент.
В положении 2 рукоятки контроллера размыкается контакт К13 и замыкается контакт К12. Двигатель включается в сеть по искусственной схеме. Данная схема при опускании тяжелых грузов обеспечивает работу двигателя в тормозном режиме с рекуперацией электроэнергии в сеть, а при опускании легких грузов — в двигательном режиме. При этом направление тока в якоре двигателя изменяется на обратное, что видно из развертки (см. рис. 91).
Перевод рукоятки контроллера в положения 3—5 изменяет скорость опускания грузов. Так, в положении 3 рукоятки контроллера дополнительно замыкаются контакты К4, К14 и размыкается контакт К10.
Контакт К4 закорачивает ступень регулировочного резистора R9, в результате чего поток возбуждения машины возрастает. В то же время контакт К14 закорачивает ступени пусковых резисторов R2 и R3. Контакт К10, размыкаясь, отключает тормозной резистор СТ. В итоге скорость двигателя повышается.
В положении 4 (на рис. 91 не показано) рукоятки контроллера дополнительно замыкаются контакты Кб, К15 и размыкается контакт К4. При этом в цепи якоря шунтируется еще один пусковой резистор R4, а в цепь возбуждения вводится регулировочный резистор R9; скорость опускания груза увеличивается.
В положении 5 рукоятки контроллера замыкается контакт К16, закорачивающий последний пусковой резистор R5 в цепи якоря, и размыкается контакт К5, в результате чего в цепь возбуждения вводится регулировочный резистор R8. Рост скорости опускания груза продолжается.
В положении 6 (на рис. 91 не показано) рукоятки контроллера размыкается контакт К6 и в цепь возбуждения вводится регулировочный резистор R7. В этом случае скорость опускания груза будет наибольшей.
Реле скорости PC (см. рис. 90) имеет две катушки, из которых последовательная включается только при работе лебедки на спуск. Последовательная катушка включена навстречу параллельной. Когда двигатель переводится в тормозной режим с рекуперацией электроэнергии в сеть, магнитные потоки параллельной и последовательной катушек реле складываются. При значительном весе груза и чрезмерно большой скорости его опускания ток в последовательной катушке реле PC превысит ток уставки, реле сработает и замкнет контакт PC, закорачивая этим пускорегулировочные резисторы R6—R8 в цепи обмотки возбуждения ΟПΒ. Поток возрастает, тормозной момент увеличивается и скорость опускания груза уменьшается.
Перевод рукоятки контроллера в положение 0 вызывает замыкание контактов К1, К7, К10, а всех остальных — размыкание. Якорь двигателя оказывается замкнутым на тормозной резистор (динамическое торможение) и быстро останавливается.
Особенностью электроприводов грузо-пассажирских и пассажирских лифтов является наличие специальных дверных выключателей, точно фиксирующих остановку их на заданной высоте, а также дверной блокировки, при которой двигатель не может быть включен в сеть, пока не будет закрыта дверь кабины лифта.
Принципиальная электрическая схема электропривода ресторанного лифта на переменном токе дана на рис. 92.
Основные элементы схемы: асинхронный двигатель с короткозамкнутым ротором, электромагнитный тормоз ЭТ, контакторы направлений КВ и КН, кнопочный пост управления, выключатели дверные с контактами ДВК1 и ДВК2 и конечные выключатели с контактами ВК1—ВК4, понизительный трансформатор Тр, реле максимального тока РМ, сигнальные лампы ЛК и ЛЗ, коммутационные приборы и предохранители.
Пуск двигателя производится нажатием кнопки «Подъем» или «Спуск» в зависимости от положения лифта. При нажатии кнопки «Подъем» в сеть включается катушка контактора направления КВ, который, замыкая свои силовые контакты КВ, включает двигатель в сеть. Путь тока: фаза С — автоматический выключатель А В — катушка контактора КВ — блок-контакт КН — контакт верхнего конечного выключателя ВК2 — кнопка «Подъем» — контакты дверных выключателей ДВК1 и ДВК2 — контакт реле РМ — автоматический выключатель АВ — фаза В.

Рис. 92. Принципиальная электрическая схема контакторного управления электропривода лифта
Остан а вливается кабина автоматически конечным выключателем ВК2, разрывающим цепь питания катушки контактора КВ. Спуск кабины производится нажатием кнопки «Спуск», в результате чего включается контактор направления КН и замыкает контакты КН в цепи питания двигателя. Останавливается кабина при размыкании контакта ВК1 конечного выключателя.
Блок-контакты КВ и КН контакторов направления шунтируют кнопки «Подъем» или «Спуск», обеспечивая питанием катушки контакторов КВ и КН после того, как кнопки будут отпущены. Контакты конечных выключателей ВК3 и ВК4 включают сигнальные лампы при движении лифта вверх или вниз.
Для защиты привода от перегрузок предназначены реле максимального тока РМ, размыкающие при перегрузках цепь питания контакторов направления.
Защиту от резкого снижения напряжения и повторного включения обеспечивают контакторы направления.