§ 21. ОСНОВНЫЕ ПРИНЦИПЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Скорость вращения электродвигателя можно регулировать по системе генератор — двигатель, при помощи ионного электропривода, электромашинного усилителя, магнитного усилителя, электрического вала и др.
Схема регулирования скорости вращения электродвигателей по системе генератор — двигатель (ГД) в упрощенном виде показана на рис. 104. Система ГД позволяет осуществить плавное регулирование скорости в широком диапазоне и ее часто применяют в электроприводе крупных станков и других агрегатов. Система состоит из трехфазного двигателя ДП, генератора постоянного тока ГПТ и возбудителя В, находящихся на одном валу. Приводной электродвигатель постоянного тока с параллельным возбуждением ДПТ питается от генератора ГПТ; возбудитель В — общий для питания обмоток возбуждения генератора ГПТ и электродвигателя ДПТ.
Пускают в ход электродвигатель ДПТ до номинального числа оборотов постепенным повышением напряжения на генераторе ГПТ при помощи реостата Р2. Превышение номинальной скорости вращения электродвигателя ДПТ достигается уменьшением его тока возбуждения реостатом Р1 при неизменном напряжении на генераторе ГПТ. В системе ГД максимальная скорость может превышать минимальную в 20—30 раз.

Рис. 104. Схема регулирования скорости электродвигателя параллельного возбуждения по системе генератор — двигатель
Переключатель П изменяет направление тока в обмотке возбуждения генератора ГПТ, что вызывает соответственное изменение направления тока в якоре электродвигателя ДПТ и изменяет направление его вращения на обратное.
Для привода механизмов с резкими колебаниями (толчками) нагрузки, например для прокатных станов, применяют систему ГД с маховиком, посаженным на вал агрегата ГД. При резком повышении нагрузки скорость вращения агрегата, питающего электродвигатель ДПТ, падает; в этот момент большая масса маховика, накопившая запас кинетической энергии, удерживает прежнюю скорость вращения и производит сглаживающее действие. При снижении нагрузки скорость вращения питающего агрегата повышается, вместе с этим увеличивается скорость вращения маховика, который вновь накапливает запас энергии.
Схему ионного электропривода применяют для регулирования скорости вращения приводного электродвигателя (рис. 105). Треханодный управляемый ртутный выпрямитель УРВ с сеточным регулированием напряжения питает якорь электродвигателя постоянного тока Д с независимым возбуждением ОВД.
В зависимости от включения каждой пары контакторов В («Вперед») или Н («Назад») изменяется направление тока в якоре электродвигателя Д (на схеме показано стрелками) и двигатель работает либо в двигательном режиме, либо в. режиме торможения, при котором число оборотов снижается. При этом направление тока через ртутный выпрямитель УРВ остается неизменным от анода к катоду, что нетрудно проследить по схеме.

Рис. 105. Схема ионного электропривода

Рис. 106. Принципиальная схема электромашинного усилителя с поперечным полем
В цепи ртутного выпрямителя включен дроссель Др, назначение которого — сгладить пульсации выпрямленного тока. Трансформатор Т, питающий ртутный выпрямитель УРВ, во вторичной обмотке включен по схеме «зигзаг», часто применяемой в схемах питания ртутных выпрямителей для сглаживания пульсирующих потоков рассеяния в трансформаторе.
Электрические усилители, применяемые в схемах регулирования скорости вращения электродвигателя, позволяют осуществить управление в электрических цепях большой мощности посредством маломощной аппаратуры. В настоящее время в промышленности находят применение, главным образом, электромашинные и магнитные усилители.
Электромашинный усилитель (ЭМУ) представляет собой небольшой агрегат, состоящий из спаренных на одном валу электродвигателя переменного тока и генератора постоянного тока, который имеет две пары щеток, сдвинутых под углом 90°, причем одна пара щеток соединена накоротко.
На рис. 106 показана принципиальная схема наиболее распространенного ЭМУ с поперечным полем. Обмотка возбуждения ОУ, называемая обмоткой управления, создает магнитный поток Ф1.
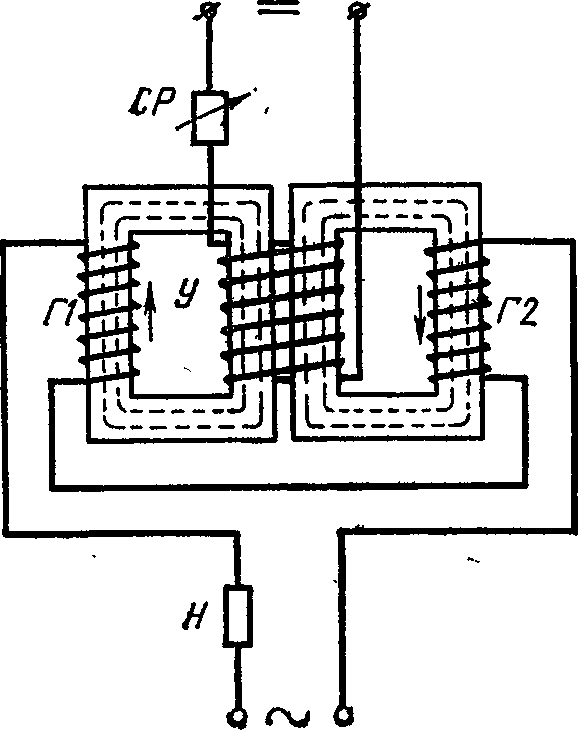
Рис. 107. Принцип действия магнитного усилителя
Поскольку якорь, вращаясь, пересекает поток Ф1, в его проводниках возникает ток, направление которого показано крестиками (от нас) и точками в кружках (к нам).
В свою очередь, ток в обмотке якоря создает магнитный поток Ф2, перпендикулярный к потоку Ф1 и называемый поперечным потоком реакции якоря. Направление поперечного потока остается неизменным, а так как проводники якоря его непрерывно пересекают, в них возникает э. д. с., направление которой показано крестиками и точками без кружков. Эту э. д. с. можно снять через вторую пару щеток (на схеме вертикальную) и питать внешнюю нагрузку. Регулируя небольшую величину тока возбуждения в обмотке ОУ, можно получить соответственные изменения значительно большей величины тока в цепи внешней нагрузки ЭМУ. Кроме потоков Ф1 и Ф2 в якоре ЭМУ от нагрузочного тока создается еще продольный поток реакции Ф3, направленный навстречу потоку Ф1 и ослабляющий его. Для компенсации потока Ф3 служит компенсационная обмотка КО. Следует отметить, что ЭМУ обычно имеют несколько обмоток управления, взаимодействующих в сложных схемах.
Магнитные усилители с помощью постоянного тока малой мощности позволяют регулировать переменный ток значительно большей мощности. Достоинством магнитных усилителей является отсутствие в них движущихся частей, поэтому они получили широкое применение в системах автоматического управлений. Принцип действия магнитного усилителя показан на рис. 107.
Два стальных сердечника из высококачественной никелевой стали (пермаллоя) имеют две обмотки; управляющую У постоянного тока и главную переменного тока, состоящую из двух последовательно соединенных обмоток Г1 и Г2. Направление тока главных обмоток Г1 и Г2 таково, что создаваемые ими магнитные потоки по отношению к управляющей обмотке направлены навстречу друг другу (на рисунке показано стрелками) и, таким образом, не наводят В управляющей обмотке переменной э. д. с. Если в управляющей обмотке У нет постоянного тока, магнитный усилитель представляет собой, по существу, дроссель с большим индуктивным сопротивлением, включенным в цепь переменного тока последовательно с нагрузкой; при этом величина переменного тока, питающего нагрузку Н, незначительна.
Подавая в управляющую обмотку У постоянный ток небольшой мощности, подмагничивают сердечник, при этом индуктивное сопротивление обмоток Г1 и Г2 падает и соответственно возрастает ток. в цепи нагрузки переменного тока Н.
Рассмотрим два примера применения электромашинных и магнитных усилителей в схемах регулирования скорости электродвигателей.
На рис. 108 показана принципиальная схема управления электродвигателем по системе ГД с применением усилителя ЭМУ, который здесь выполняет роль возбудителя генератора Г, питая постоянным током его обмотку возбуждения ОВГ. Усилитель ЭМУ в данной схеме имеет две обмотки управления 1УО и 2УО. Обмотка 1УО присоединена через реостат R к цепи постоянного тока от вспомогательного источника, а обмотка 2УО подключена к тахогенератору ТГ.

Рис. 108. Схема управления электродвигателем постоянного тока, работающим по системе ГД с применением электромашинного усилителя

Рис. 109. Применение магнитного усилителя для смягчения пуска короткозамкнутого асинхронного двигателя
Тахогенератор представляет собой маленький генератор постоянного тока, находящийся на одном валу с электродвигателем Д. Обмотка возбуждения тахогенератора ОВТГ имеет независимое питание от основного возбудителя ОВД.
Действие обмоток 1УО и 2УО взаимно противоположно. Скорость вращения электродвигателя Д устанавливается реостатом R. Если в процессе работу нагрузка электродвигателя Д уменьшится и, следовательно, его скорость станет возрастать, это вызовет повышение напряжения на тахогенераторе ТГ и усилится размагничивающее действие обмотки 2УО. При неизменившемся токе в обмотке 1УО произойдет понижение напряжения на зажимах усилителя ЭМУ и на генераторе Г; скорость вращения электродвигателя Д уменьшится до ранее установленной реостатом R. Таким образом, при колебаниях нагрузки на электродвигателе Д заданная его реостатом R скорость автоматически поддерживается постоянной.
Магнитный усилитель может быть применен для смягчения пуска асинхронного короткозамкнутого двигателя Д (рис. 109). В каждую из фаз обмотки статора электродвигателя Д включен магнитный усилитель МУ. Все три усилителя соединены последовательно, и их обмотка управления У питается через реостат R от сухого выпрямителя ПВ, присоединенного к двум фазам между статором и магнитным усилителем.
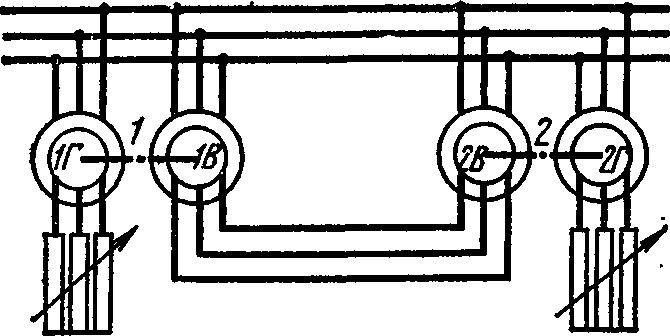
Рис. 110. Схема электрического вала с вспомогательными асинхронными двигателями
В момент включения электродвигателя в сеть, поскольку выпрямитель ПВ не дает питания в обмотку У, главные обмотки переменного тока магнитного усилителя работают как дроссель. На статор поступает пониженное напряжение, при котором электродвигатель начинает набирать скорость. Пусковой ток быстро падает, в связи с чем уменьшается падение напряжения на магнитном усилителе и повышается напряжение на обмотке статора электродвигателя. Одновременно растет ток в обмотках У от выпрямителя ПВ, уменьшается индуктивное сопротивление главных обмоток МУ и происходит дальнейшее увеличение напряжения на обмотке статора электродвигателя до номинальной величины напряжения сети.
Устанавливая с помощью реостата R определенный ток подмагничивания, можно регулировать скорость вращения электродвигателя изменением напряжения, подаваемого на его статорную обмотку.
Электрический вал представляет собой систему двух (или большего числа) механизмов, электродвигатели которых, не будучи связаны между собой механически, имеют такую электрическую связь, при которой скорость их вращения автоматически поддерживается одинаковой (синхронной).
Существуют различные схемы электрического вала. Одна из них, наиболее простая, показана на рис. 110. Механизмы 1 и 2, не связанные между собой механическим валом, имеют приводные электродвигатели 1Г и 2Г. Вместе с этими электродвигателями на одном валу с каждым из них вращаются вспомогательные асинхронные двигатели 1В и 2В. Роторы вспомогательных асинхронных двигателей, имеющие фазную обмотку с кольцами, электрически соединены между собой, а их статоры присоединены к одной и той же сети.
При увеличении нагрузки на вал электродвигателя 1Г скорость его уменьшается относительно скорости электродвигателя 2Г. При одинаковой скорости электродвигателей 1Г а 2Г в роторах электродвигателей 1В и 2В нет тока, так как э. д. с. обоих роторов одинаковы и направлены навстречу друг другу. Если же скорость электродвигателя 1Г по отношению к скорости электродвигателя 2Г понизится, в цепи роторов появится уравнительный ток, обусловленный разностью э. д. с. Ток пойдет в направлении от ротора 2В к ротору 1В и несколько повысит нагрузку на машину 2В (генераторный режим), вследствие чего скорость ее уменьшится. У машины 1В скорость, наоборот, несколько увеличится, поскольку ее режим становится двигательным. Таким образом происходит выравнивание скоростей электродвигателей 1Г и 2Г.
Электрический вал применяют для электропривода тяжелых станков, ворот, шлюзов, т. е. там, где приводные электродвигатели, работающие со (строго одинаковой скоростью, расположены на значительном расстоянии друг от друга и не могут быть соединены общим механическим валом.