§ 2. ОСНОВНЫЕ ТИПЫ ЭЛЕКТРОДВИГАТЕЛЕЙ МАШИН И МЕХАНИЗМОВ ДЛЯ ОТКРЫТЫХ ГОРНЫХ РАБОТ
На открытых горных работах в связи с разнообразием технологических процессов широко применяются электродвигатели постоянного и переменного тока.
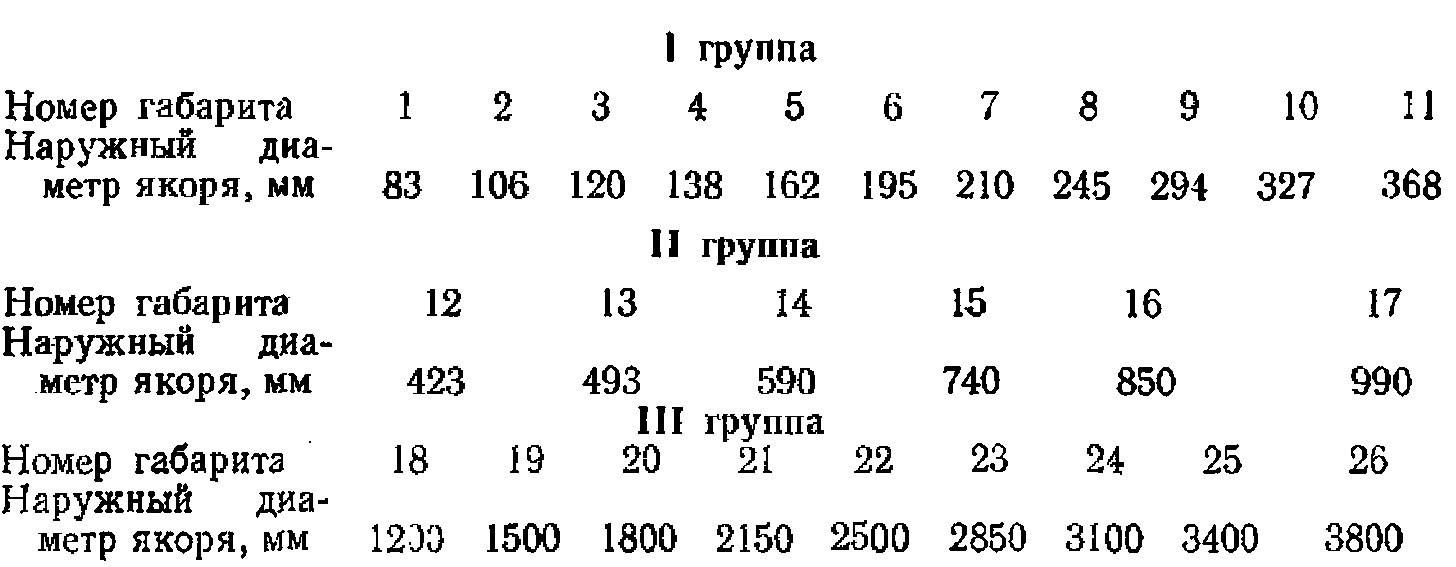
В настоящее время выпускаются двигатели постоянного тока единой серии П, которая включает 26 габаритов (габарит определяется наружным диаметром якоря и обозначается условным номером) и делится но мощности на три группы: 1) от 0,3 до 200 кВт; 2) от 200 до 1400 кВт; 3) свыше 1400 кВт.
Единая серия П включает двигатели общего и специализированного назначения. Двигатели, изготавливаемые для применения на экскаваторах, отличаются повышенной механической прочностью и нестандартным напряжением якорной цепи обмотки возбуждения. Они выпускаются с независимым возбуждением, рассчитанным на длительное включение (ПВ = 100%). В отличие от двигателей основного исполнения катушки обмоток независимого возбуждения соединяют последовательно в одну группу с двумя выводными концами. В обозначении двигателей ставится буква Э (экскаваторный).

Рис. 2. Общий вид двигателя единой серии П
Двигатели I группы имеют по две длины сердечника якоря в каждом габарите, а у II и III групп количество длин сердечников доходит до девяти. Условное обозначение двигателей расшифровывается следующим образом, например: первой группы — ПЭ82 — двигатель единой серии П, экскаваторный, 8 габарита, с сердечником второй длины; второй группы — ПЭ-151-5К — 15 габарита, с сердечником первой длины, пять щеток на каждом бракете, компенсированная; третьей группы — ПЭ-22-125-6К — 22 габарита, с длиной сердечника 125 см. Обозначения могут быть и следующими: МПЭ — электрическая машина (М); ДПЭ — электродвигатель (Д); ДПВ — вертикального исполнения (В). Общий вид двигателей горизонтального и вертикального исполнений показан на рис. 2. Для охлаждения на двигатели устанавливают вентиляторы типа «наездник» или подключают к централизованной вентиляционной сети экскаватора.
Станины двигателей изготавливают из стали сварными, неразъемными или разъемными. Сердечники главных и вспомогательных полюсов набирают из электротехнической стали и скрепляют заклепочными штифтами. Обмотки главных полюсов бескаркасные, двухшайбовые.
Таблица 2
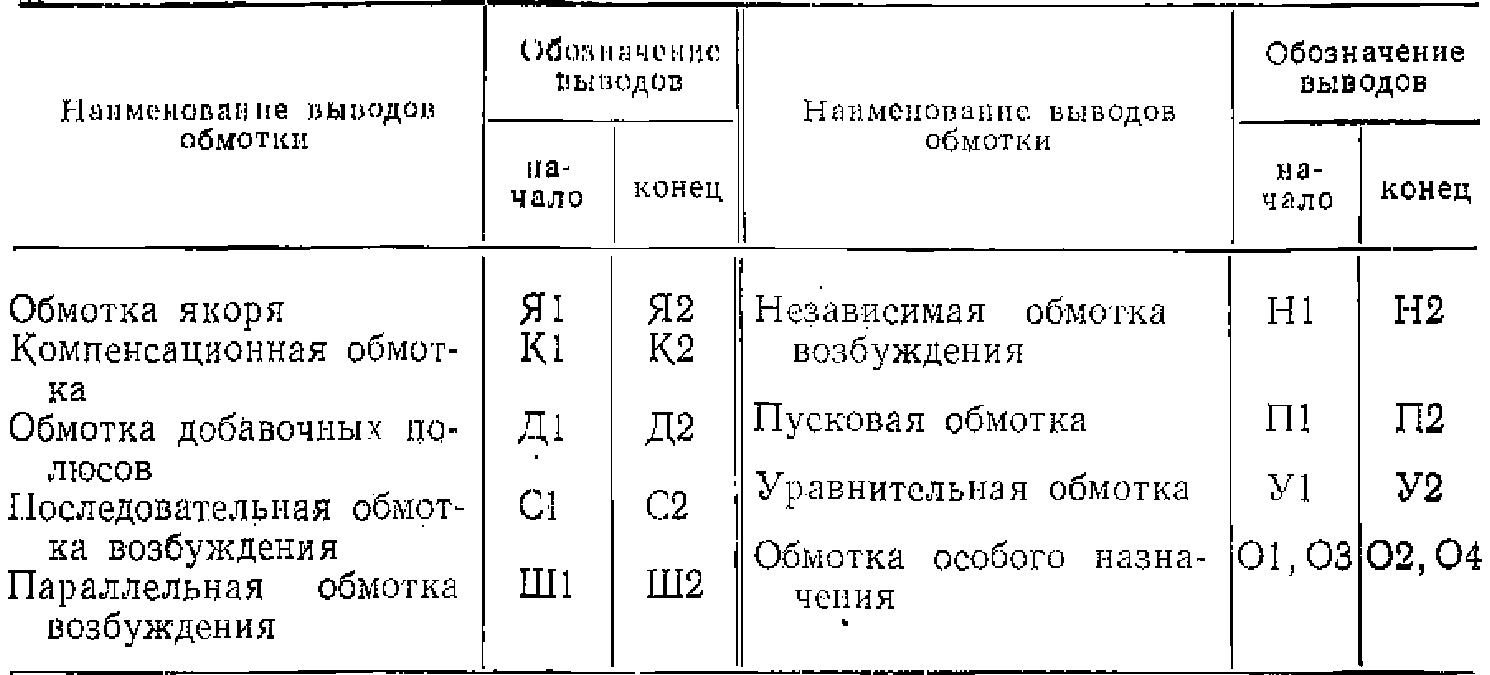
Обмотки добавочных полюсов выполнены в виде катушки из медного неизолированного провода прямоугольного сечения с изоляцией витков друг от друга. Компенсационные обмотки выполняют в виде однослойных катушек или в виде изолированных стержней, вложенных в пазы главных полюсов. Траверсы, несущие литые из чугуна, оцинкованные бракеты для щеткодержателей выполняют из листовой стали в виде кольца или литыми из серого чугуна. Сердечники якоря собирают на сварном корпусе из цельных листов электротехнической стали. Обмотки якоря выполняют секциями, намотанными медным проводом прямоугольного сечения с изоляцией из микаленты и микафолия. Секции закладывают в открытые пазы сердечников якоря. Обмотку крепят в пазовой части гетинаксовыми клиньями, а в лобовых частях — стальными проволочными бандажами. Коллектор состоит из отдельных трапециевидной формы пластин твердотянутой электролитической или кадмиевой меди, разделенных миканитовыми прокладками. Выводы выполняют медным неизолированным проводом прямоугольного сечения, присоединяют к зажимам, установленным на общей панели, и закрывают их крышкой. Обозначения выводов по ГОСТ 183—74 приведены в табл. 2.
Электродвигатели постоянного тока, применяемые в качестве главных приводов экскаваторов, должны удовлетворять специальным требованиям, определяемым характером работы механизма. Например, механизм подъема ковша работает в условиях резко переменной нагрузки, которая может быть настолько велика, что возникает опасность разрушения механической передачи. Поэтому механическая характеристика электропривода подъема и напора ковша должна обладать определенной мягкостью. Электропривод механизма поворота работает в режимах пуска, торможения и реверса. Маховые массы механизма значительно превышают маховые массы двигателя, поэтому электропривод должен обеспечить плавность протекания переходных процессов в минимум времени с ограниченным ускорением, исключающим резкие удары в передачах

Рис. 3. Механические характеристики двигателей главных механизмов экскаваторов:
а — двигателя подъема ПЭ Ι34-4Κ (ЭШ-10/60); 6 — двигателя подъема ПЭ 153-11К (Э1Л-15/90А); в — двигателя тяги ПЭ 153-11К (ЭШ-15/90А); I — режим с полным потопом двигателя; 2 — режим с ослабленным потоком двигателя
.
Основным общим требованием, предъявляемым ко всем электроприводам главных механизмов экскаваторов, является снижение частоты вращения до нуля при предельном увеличении нагрузки. Поэтому механические характеристики главных электроприводов имеют экскаваторную форму, которая обеспечивает максимальную частоту вращения двигателя при рабочих нагрузках и ограничение момента до допустимой величины при стопорении рабочего механизма. Примеры некоторых характеристик даны на рис. 3.
Для привода вспомогательных механизмов экскаваторов и главного привода других машин и механизмов открытых горных разработок широко применяются асинхронные электродвигатели с короткозамкнутым и фазным роторами. Двигатели с короткозамкнутым ротором просты по конструкции, надежны в работе, имеют сравнительно малые габариты и массу, обладают большим пусковым моментом и относительно большой перегрузочной способностью. Недостаток заключается в невозможности автоматического регулирования частоты вращения при изменениях нагрузки на рабочих органах машин. Двигатели с фазным ротором позволяют производить плавный пуск и остановку, а также регулировать частоту вращения.
Распространение получили двигатели единой серии А2 и А02, АК, МТ и МТК и их различные модификации. Но более совершенными явились разработанные в последние годы электродвигатели серии 4А с высотой оси вращения 56—355 мм и мощностью 0,12— 400 кВт.
Двигатели серии 4А по сравнению с двигателями А2 и А02 имеют в среднем на 18% меньшие массу и габариты, что достигнуто применением электротехнической стали е меньшими удельными потерями и большей магнитной проницаемостью; меньшие высоты оси вращения; большие пусковые моменты; меньший уровень воздушного шума и вибраций; их мощности увязаны с установочными размерами, принятыми странами — членами Совета Экономической Взаимопомощи (СЭВ) для новых унифицированных серий.
Кроме основного исполнения, трехфазные двигатели на частоту 50 Гц, предназначенные для общего применения в приводах, не предъявляющих специальных требований в отношении пусковых характеристик и скольжения, могут выпускаться с повышенными пусковым моментом или скольжением, многоскоростные, специализированные по конструкции или по условиям окружающей среды. По степени защиты предусмотрено два исполнения: ΙΡ44 (закрытое) и ΙΡ23. (защищенное).
Условное обозначение типа двигателя расшифровывается следующим образом, например, 4АН200МВ2: 4 — номер серии; А — асинхронный; Н — исполнение ΙΡ23 (для ΙΡ44 обозначение не дается); если имеется вторая буква А, она обозначает алюминиевые станину и щиты (X — алюминиевая станина и чугунные щиты); 200 — высота оси вращения, мм; М (S, L) — установочные размеры по длине корпуса согласно решениям Международной электротехнической комиссии (МЭК); В (А)—Длина сердечника (указывается в том случае, когда на одном установочном размере предусмотрены две мощности); последняя цифра 2 (4, 6, 8) — число полюсов.
Шкала мощностей и частоты вращения двигателей серии 4А. приведены в табл. 3, а номинальные значения кратности пускового и максимального моментов — в табл. 4.
Таблица 3
Электро двига тель | Мощность (кВт) при синхронной частоте вращения, об/мин | Электро | Мощность (кВт) при синхронной частоте вращения, об/мин | |||||||||||||||
3000 | 1600 | 1 000 | 750. | 3000 | 1500 | 1000 | 750 | |||||||||||
| Исполнение ΙΡ44 |
| Исполнение ΙΡ23 | |||||||||||||||
4AI60S | 15 | 15 | 11 | 7,5 | 4AH160S | 22 | 18,5 |
|
| |||||||||
4А160М | 18,5 | 18,5 | 15 | 11 | 4АН160М | 30 | 22 |
|
| |||||||||
4A180S | 22 | 22 | — | — | 4АН180S | 37 | 30 | 18,5 | 15 | |||||||||
4ΑΙ80Μ | 30 | 30 | 18,5 | 15 | 4АН180М | 45 | 37 | 22 | 18,5 | |||||||||
4А200М | 37 | 37 | 22 | 18,5 | 4ΛΗ200Μ | 55 | 45 | 30 | 22 | |||||||||
4A200L | 45 | 45 | 30 | 22 | 4AH200L | 75 | 55 | 37 | 30 | |||||||||
4А225М | 55 | 55 | 37 | 30 | 4АН225М | 90 | 75 | 45 | 37 | |||||||||
4A250S | 75 | 75 | 45 | 37 | 4AH250S | 110 | 90 | 55 | 45 | |||||||||
4А250М | 90 | 90 | 55 | 45 | 4АН250М | 132 | 10 | 75 | 55 | |||||||||
4A280S | 10 | 10 | 75 | 55 | 4АН280Й | 160 | 132 | 90 | 75 | |||||||||
4А280М | 132 | 132 | 90 | 75 | 4АН280М | 200 | 160 | 110 | 90 | |||||||||
4A315S | 160 | 160 | 10 | 90 | 4AH315S | — | 200 | 132 | 10 | |||||||||
4А315М | 200 | 200 | 132 | 10 | 4АН315М | 250 | 250 | 160 | 132 | |||||||||
4A355S | 2Б0 | 250 | 160 | 132 | 4AH355S | 315 | 315 | .200 | 160 | |||||||||
4А355М | 315 | 315 | 200 | 160 | 4АН355М | 400 | 400 | 250 | 200 | |||||||||
Высота оси вращения, мм | Кратность пускового момента при синхронной частоте вращения, об/мин | Высота оси вращения, мм | Кратность максимального момента при синхронной частоте вращения, об/мин | |||||||||||||||
3000 | 1500 | 1000 | 750 | 3000 | 1500 | 1000 | 750 | |||||||||||
56—112 | 2,0 | 2,0 | 2,0 | 1,6 | 56—112 | 2,2 | 2,2 | 2,2 | 1,7 | |||||||||
13.2 | 1.6 | 2,0 | 2,0 | 1,8 | 132 | 2,2 | 2,2 | 2,2 | 2,2 | |||||||||
160 | 1.2 | 1,2 | 1,4 | 1,2 | 160—280 | 2,2 | 2,0 | 1,9 | 1,7 | |||||||||
160—280 | 1,2 | 1,2 | 1,2 | 1,2 | 315, 355 | 1,9 | 1,9 | 1,9 | 1,9 | |||||||||
315, 355 | 0,9 | 0,9 | 1,0 | 1,0 |
|
|
|
|
| |||||||||
Номинальные значения напряжения 380 и 660 В. Для 4-, 6- и. 8-полюсных двигателей кратность пускового тока в пределах 4—6, максимум 7,5.
Общий вид двигателей некоторых типов показан на рис. 4.
Станина и щиты двигателей с высотами оси вращения 56 и 63 мм выполняются из алюминия; 71—100 мм — из алюминия или чугуна; 112—355 мм — из чугуна. Коробки выводов для двигателей с высотой вращения до 250 мм располагаются сверху, а с 280 мм — сбоку станины. Коробки выводов могут выпускаться с доской зажимов или без нее. Двигатели выполнены на подшипниках качения.
Обмотка статора двигателей с высотами оси вращения 56— 250 мм выполняется всыпной из круглого провода; при больших высотах оси вращения — из прямоугольного провода с жесткими секциями. В зависимости от мощности двигателя обмотка статора покрывается изоляцией классов Е, В или F.
Короткозамкнутая клетка ротора выполняется литой из алюминия. Двигатели исполнения ΙΡ44 имеют аксиальную систему вентиляции, исполнения ΙΡ23 — двустороннюю радиальную систему вентиляции, осуществляемую при помощи лопаток на короткозамкнутых кольцах ротора.

Рис. 4. Общий вид асинхронных электродвигателей серии 4Л: а — 4А180М4; 6 — 4Л180М4, фланцевый; в — 4АН225М4