Для машин и механизмов, входящих в состав угледобывающего комплекса, предусмотрено дистанционное управление с применением в качестве пускозащитной аппаратуры магнитных станций управления.
Электрическая схема станции СУВ-350 позволяет управлять угледобывающими комплексами КМ87 и его модификациями, комплексами с крепью «Донбасс», КД70 и другими. Схема предусматривает работу совместно с аппаратурой АУПС. Рассмотрим принципиальную схему управления комплексом КМ87Э, приведенную на рис. 52 и 53. Схемы рассматривают совместно.
Электрическая схема обеспечивает:
дистанционное управление с центрального пульта (ЦПУ) всеми электродвигателями комплекса за исключением электродвигателя комбайна, управление которым предусмотрено с блока управления комбайна;
останов конвейера с блока управления комбайна;
снятие напряжения с магнитной станции при помощи аварийной кнопки «Стоп» с воздействием последней на аварийный выключатель станции.
При подготовке к пуску включают разъединитель Р и подают напряжение на трансформатор Тр2. Получает питание промежуточное реле дистанционного отключения ΡΟΙ и его контакт включает катушку расцепителя нулевого напряжения РНН, питающуюся от выпрямительного моста ВМ9 (рис. 52). Кроме контакта) РЮ1 в цепи питания РНН находятся размыкающие контакты блоков защиты Б31—£37. Затем включают аварийный выключатель АВ1, и на трансформатор Тр1, а также стабилизаторы СТ блоков управления всех фидеров подается напряжение. При установленных в нулевое положение рукоятках универсальных переключателей УП1—УП4 контакторы фидеров 1—7 подготовлены к включению, Для подачи напряжения на трансформатор Тр-3 и подготовки к работе фидеров сети 127 В включают выключатель АВ2.
В таком состоянии схема подготовлена для управления комплексом.
Перед включением комбайна подают звуковой предупредительный сигнал путем замыкания контактов кнопки «Сигнал». Включается промежуточное реле РП8, затем контактор К8, что приводит к включению сирен. Кроме этого, контактор К8 своим контактом замкнет цепь питания электронного реле времени ЭРВ. Срабатывает контактор К1.1 реле ЭРВ и своим контактом ЭРВ] шунтирует кнопку «Сигнал», блокируя во включенном положении реле РП8 и обеспечивая определенную длительность звучания сирен. Через 8 с срабатывают реле K2J и КЗ.], что приводят к прекращению сигнала.
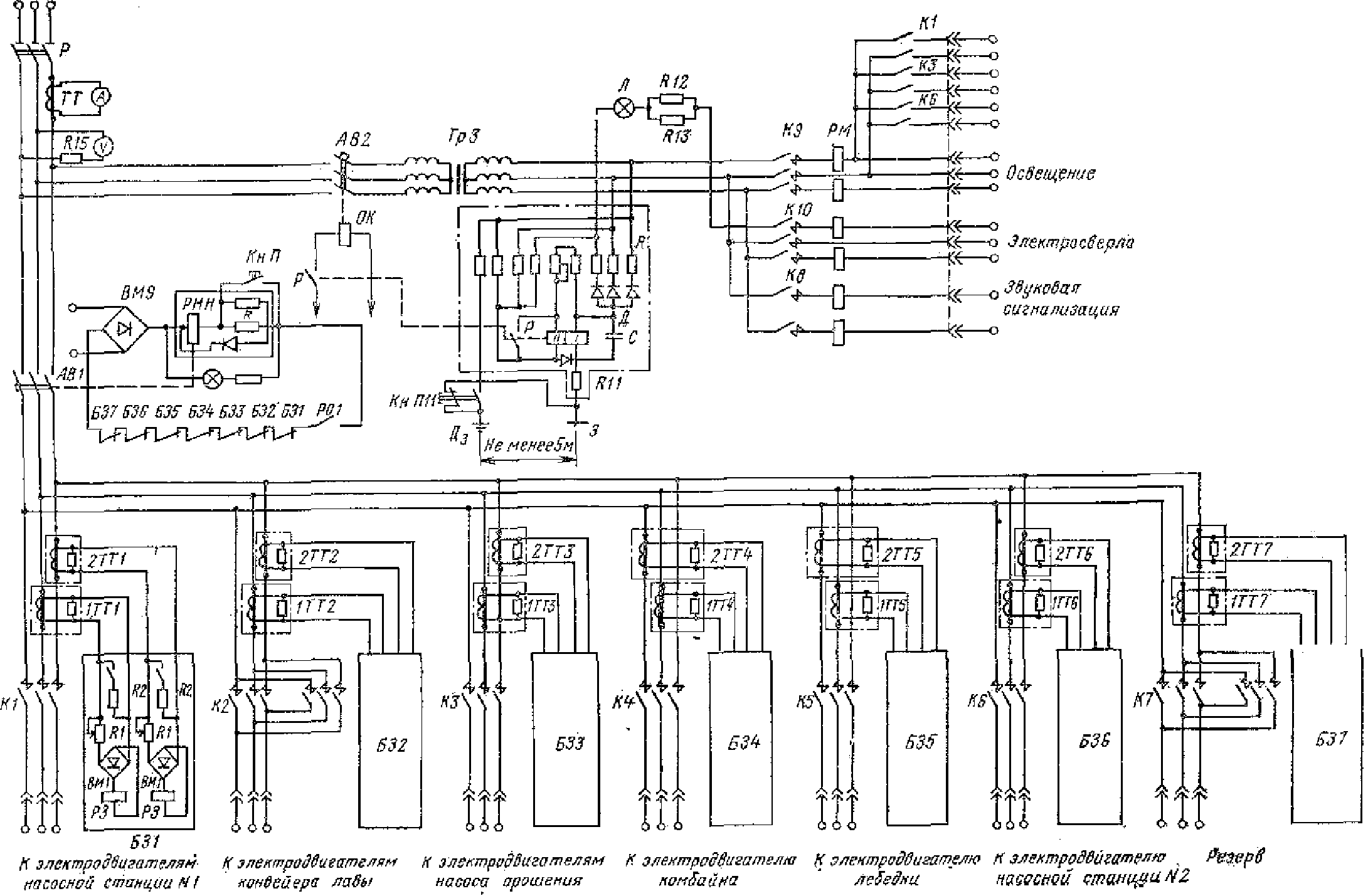
Рис. 52. Схема силовых целей приводов угледобывающего комплекса КМ87Э

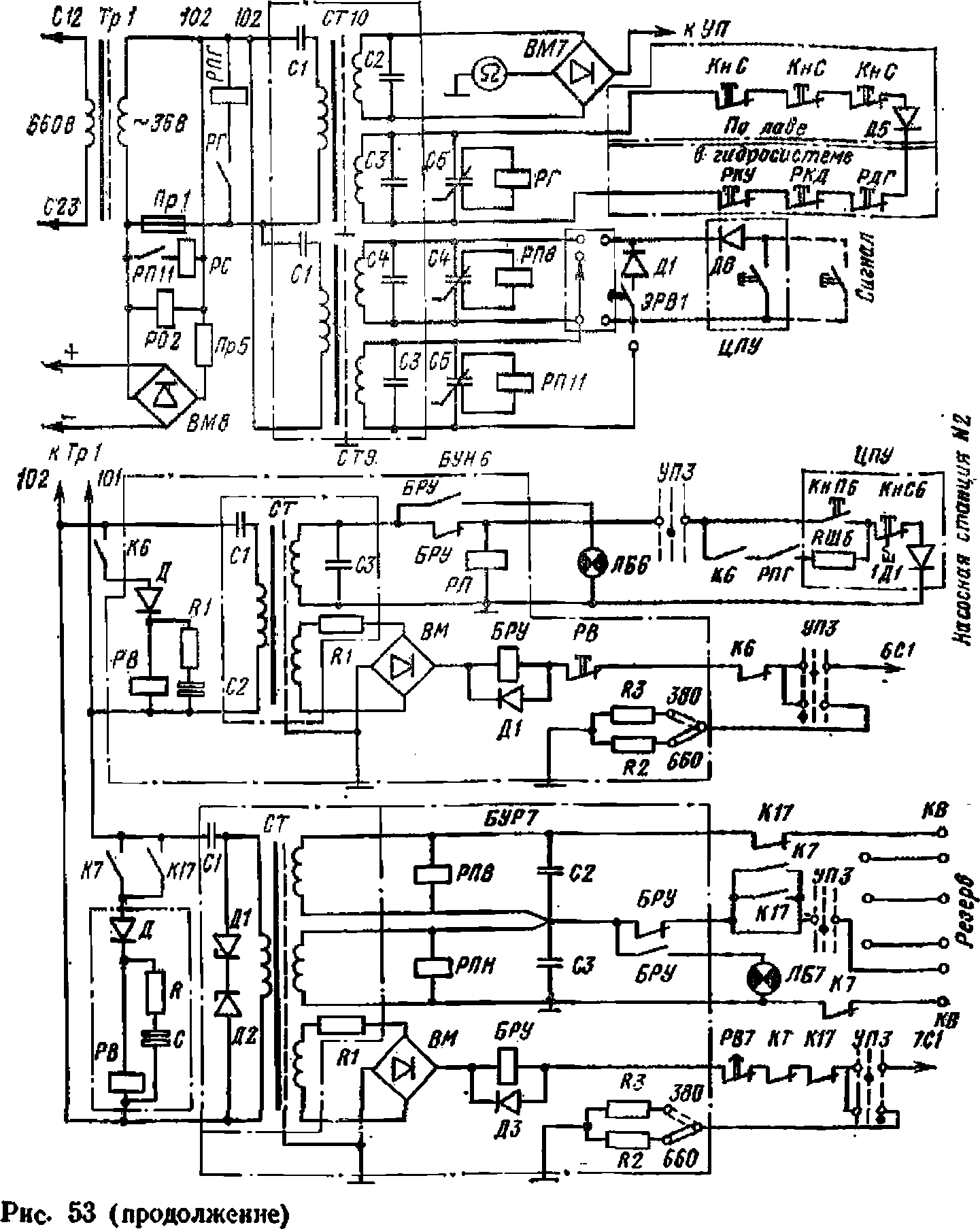
Рис. 53. Схема дистанционного управления угледобывающим комплексом КМ87Э
В цепи управления комбайном в течение 6 с будет замкнут контакт ЭРВ2, и если за это время двигатель комбайна не включится, то вновь подается предупредительный сигнал. Для включения двигателя комбайна используют кнопку КнП4, контакты которой замыкают цепь питания реле РП в блоке БУН4. Реле PH своими контактами создает цепь питания контакторной катушки К4, что приводит к замыканию силовых контактов К4 и включению двигателя комбайна. Затем автоматически включается двигатель насоса орошения, так как в его цепи управления находится замыкающий блок-контакт К4 (блок БУНЗ). При создании нормального давления в оросительной системе замкнется контакт реле давления РД, шунтирующий кнопку К,нП4, после чего можно прекратить ее нажатие. Блок-контакт К4 в блоке БУН4 шунтирует контакт ЭРВ2, поэтому питание реле РП становится независимым от состояния реле ЭР В. Через 13 с после подачи предупредительного сигнала контакт ЭРВ2 размыкается, и реле ЭРВ вновь готово к работе.
Для управления конвейером лавы можно использовать кнопочный пост на комбайне или на ЦПУ. Перед включением конвейера подается предупредительный сигнал кнопкой «Сигнал» и повторяются операции, описанные для комбайна.
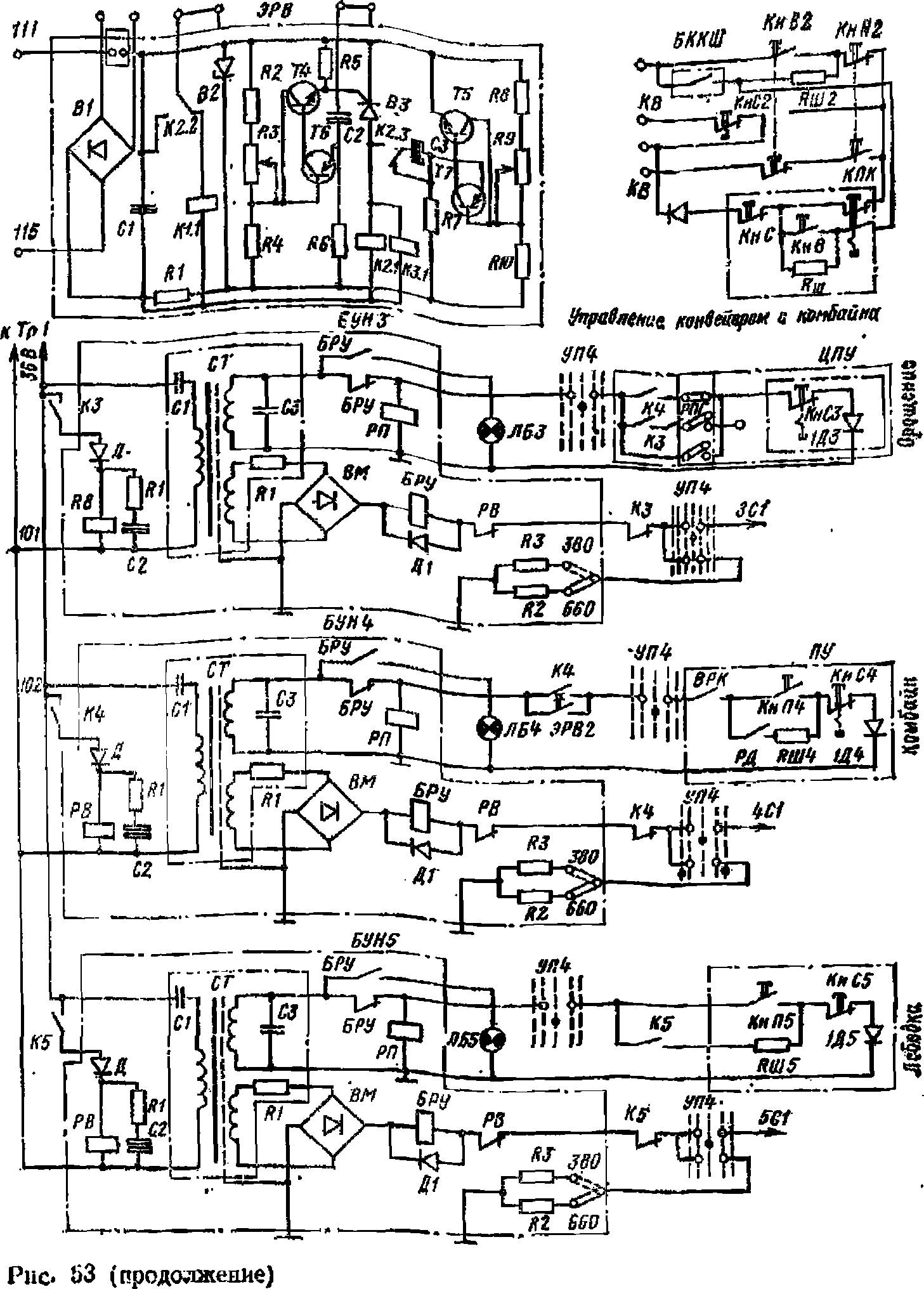
Управление конвейером е ЦПУ производится с помощью кнопки КнВ2, а при ремонтных операциях для реверсирования движения цепи конвейера используют кнопку КнН2.
Нажатие на кнопку КнВ2 приводит к срабатыванию реле РПВ а затем контактора К2. и включению двигателей конвейера. Если при включенном конвейере лавы конвейер штрека прекратил работу, то его блок-контакт БККШ размыкает цепь питания реле РПВ, и конвейер лавы останавливается.
Перед управлением конвейером с пульта управления комбайна нажимают на кнопку КпК, установленную в ЦПУ, и оставляют ее в фиксированном положении, а в коробке выводов производят переключение перемычек. Если кнопка КпК не нажата, то управление конвейером производится только в ЦПУ.
При подводке к комбайну одного семижильного кабеля марки ГРШЭ для управления конвейером на комбайне используют только кнопку «Стоп» КнС12. При этом вновь производят перестановку перемычек в коробке выводов станции. Останов конвейера возможен при размыкании цепи питания РПВ любым кнопочным постом «Стоп» (КнС2, КнС12) включенным в цепь управления конвейером, а также кнопками КнСЮ, КнСП, установленными на верхней и нижней головках конвейера. Эти кнопки разомкнут цепь питания реле РП12, контакт РП12 в цепи дистанционного управления конвейером разомкнется и отключит конвейер. Для защиты двигателей в случае тепловой перегрузки установлены температурные реле ДТР-ЗМ. Их размыкающие контакты введены в цепь реле РП12, что при срабатывании защиты также приводит к отключению двигателя конвейера.
Насосные станции № 1 и № 2 включаются кнопками КнП1 и КнПб с ЦПУ, а отключить их можно кнопками КнС1, КнСб и кнопками КнС, установленными вдоль лавы. Кнопки КнП1 и КнПб держат нажатыми до тех пор, пока не включится реле РГ, что может произойти, если будут замкнуты следующие контакты: реле давления РДГ, контролирующего обрыв шланга; реле контроля уровня РКУ, контролирующего нижний уровень масла в баке станции; реле контроля давления (верхний предел) РКД в насосной станции. В этой же цепи находятся включенными кнопки ДнС, установленные вдоль лавы. Срабатывание реле РГ приводит к замыканию цепи РПГ, контакты которого совместно с блок-контактами контакторов К1 и Кб шунтируют кнопки КнП1 и КнПб.
Включают лебедку, которая может быть предохранительной для комбайна или служит для передвижки энергопоезда, кнопкой КнПб, а отключают ее кнопкой КнСб.
Резервный фидер с блоком БУР7 можно использовать для управления как реверсивным, так и нереверсивным двигателем.
Светильники лавы, сирены звуковой сигнализации и ручные электросверла питаются от трансформатора ТрЗ. Промежуточное реле РП9, предназначенное для включения контактора освещения К9, подключено к высокоомной искробезопасной обмотке стабилизирующего трансформатора СТ8. Срабатывание реле РП9 происходит при подаче напряжения на СУВ-350 и включенных разъединителе Р и выключателе АВ2. Аналогично подключено промежуточное реле РП10, которое включает контактор КМ, подающий питание в цепь ручного сверла.
Защита от т. к. з. осуществляется реле защиты РЗ, встроенными в блоки Б31—Б37, а в сети 127 В максимальными реле РМ. Выдержка времени при повторном срабатывании производится, а счет установки реле времени РВ, а для блокировки цепи при снижении сопротивления изоляции ниже нормы установлены блокировочные реле утечки БРУ. В сети 127 В для защиты при утечках тока на землю установлено реле утечки У АКИ-127.