Из машин, применяемых в гидромеханизации, землесосный снаряд представляет собой наиболее сложный комплекс оборудования. Поэтому выводы настоящей главы в отдельных ее частях могут быть отнесены и к другим установкам, в том числе к грунтонасосным установкам для гидромониторных работ, насосным и перекачивающим станциям.
Механизмы землесосного снаряда работают в четком взаимодействии. Приведение в действие и остановка отдельных механизмов должны происходить в определенной последовательности. Так, грунтовой насос может быть введен в работу только после включения насосов вспомогательного водоснабжения, а остановка его производится в обратном порядке. Нарушение этого порядка может повлечь за собой выход из строя уплотнения вала грунтового насоса. В случае, когда при работе машины предусматривается принудительная смазка подшипников, ее пуску должно предшествовать включение насоса циркуляции масла.
Существуют режимы, являющиеся недопустимыми при работе землесосных снарядов, например папильонирование в то время, когда обе сваи опущены в грунт. Нарушение этого требования неизбежно привело бы к аварии.
С точки зрения производительности машин важно, чтобы интервалы между включением отдельных механизмов не превышали необходимого по условиям эксплуатации времени. С другой стороны, эти интервалы не должны быть меньше необходимого. Например, при пуске грунтового насоса с предварительным образованием вакуума и заполнением улитки водой преждевременное включение двигателя повлечет за собой непроизводительную потерю времени, необходимого для повторного набора вакуума. Чрезмерно затянутый период набора вакуума также приведет к потере времени.
Высокая производительность землесосных снарядов обеспечивается работой механизмов при оптимальных параметрах, определяемых глубиной погружения всасывающего устройства, а также скоростями рыхлителя и папильонирования. Поэтому общий режим работы механизмов подлежит непрерывному контролю и корректированию.
При ручном управлении замлесосными снарядами выполнение перечисленных требований осуществляется оператором, воздействующим на каждый из механизмов в отдельности.
Автоматизация землесосных снарядов позволяет установить технологические связи между отдельными механизмами наиболее рационально и эффективно, с наименьшими потерями времени. Контроль за режимом работы механизмов и его корректировка осуществляются с помощью соответствующих датчиков в устройствах автоматического управления. При этом функция оператора ограничивается вводом в работу или остановкой группы механизмов с общим наблюдением за работой землесосного снаряда в целом.
Следует различать следующие три стадии автоматизации землесосных снарядов.
- Блокировка и защита электроприводов, предотвращающие несовместимую работу механизмов .и их перегрузку.
- Поузловая автоматизация, обеспечивающая необходимую последовательность ввода в действие и остановки механизмов.
- Комплексная автоматизация, осуществляемая в виде самонастраивающейся системы, устанавливающей без вмешательства оператора режим наивысшей производительности землесосного снаряда.
Ниже рассматриваются примеры поузловой автоматизации с применением блокировок. Принцип комплексной автоматизации землесосного снаряда рассматривается отдельно.
Автоматическое управление приводами группы механизмов грунтового насоса
Для выявления технологического взаимодействия элементов группы грунтового насоса рассмотрим гидравлическую схему землесосного снаряда.
Гидромеханическая система состоит из грунтового насоса, насосов вспомогательного водоснабжения, задвижек и другой арматуры, связанных между собой трубопроводами (рис. 10-15).
К центробежному насосу / подводятся две магистральные водяные линии: вакуума 11 и отжима 10. Вспомогательное водоснабжение осуществляется двумя насосами 2, один из которых является рабочим, другой — резервным.
Вспомогательные насосы питаются водой из водоёма, в котором работает земснаряд, и присоединены своими напорными патрубками к коллектору 4. На всасывающих линиях вспомогательных насосов установлены ручные задвижки 5. закрываемые при ремонтах и открытые при нормальной работе схемы. Изоляция неработающего насоса от напора в системе осуществляется одним из обратных клапанов 3. Вакуумная и отжимная магистрали подключены к коллектору через задвижки с электроприводом 8 и 9 соответственно, Разрежение в вакуумной магистрали, необходимое для заполнения улитки грунтового насоса водой (через его всасывающую трубу) перед пуском, создается с помощью эжектора 19. Кроме грунтового насоса к вакуумной линии через патрубок 6 присоединяется система осушения трюмов от накапливающейся в них воды вследствие водотечности корпуса. К коллектору присоединяется также система противопожарного водоснабжения 7. Отделение грунтового насоса от вакуумной линии при неработающем эжекторе достигается при помощи обратного клапана 13. Воздушный клапан 15 с обратным клапаном 14 служат для сглаживания вакуумного режима в грунтовом насосе при пуске путем импульсной подачи воздуха во всасывающую линию грунтового насоса («подтравливание»). Действие этого устройства при работе схемы автоматики не рассматривается. Для измерения давления на напорной линии грунтового насоса и коллектора служат манометры 16 и 17. Вакуумметр 18 служит для измерения разрежения в корпусе грунтового насоса. В исправно функционирующей гидравлической схеме при работе грунтового насоса на него непрерывно должна подаваться вода для отжима абразивной гидросмеси из узких областей, разделяющих вращающиеся и неподвижные части насоса. Это необходимо потому, что в этих областях происходит наиболее интенсивный износ металла от абразивного воздействия на него движущейся гидросмеси. Датчиком, контролирующим подачу воды к грунтовому насосу, служит струйное реле 12. В некоторых случаях в качестве такого датчика используют электроконтактный манометр типа ЭКМ.

Рис. 10-15. Гидромеханическая система землесосного снаряда.
Автоматизированное управление грунтовым насосом, обеспечивает необходимую последовательность включения и отключения приводов технологической группы грунтового насоса при его пуске и остановке через заданные интервалы времени.
Пуск грунтового насоса может происходить в различных режимах-
- Пуск с предварительным набором вакуума. В этом случае корпус грунтового насоса предварительно через всасывающую трубу, опущенную в водоем карьера, заполняется водой вследствие разрежения, достигаемого струей воды, направляемой в эжектор. После заполнения корпуса водой включается двигатель привода насоса и отключается эжектор с вакуумной линией.
- Пуск грунтового насоса в ход с одновременным заполнением корпуса водой. В таком режиме образование вакуума с помощью эжектора происходит одновременно с вращением рабочего колеса насоса.
- Неавтоматический пуск, используемый в основном для наладки системы, в процессе которой все приводы, входящие в группу грунтового насоса, могут включаться независимо один от другого.
Схема гидравлической системы предусматривает возможность получения любого из указанных режимов.
На рис. 10-16 представлена упрощенная схема управления грунтовым насосом с приводом от асинхронного двигателя напряжением 6000 В, где в качестве пускового сопротивления использован индукционный реостат.
В силовых цепях схемы установлен разъединитель Р, назначение которого заключается в отсоединении масляного выключателя ВМ и двигателя АД от шин 6000 В, находящихся под напряжением, для осмотра или ремонта.
Пуск и остановка двигателя производится масляным выключателем ВМ с помощью привода П (в данной схеме рассматривается пружинный привод типа ПП-67). Привод оборудован встроенными электромагнитами дистанционного включения ЭВВМ и отключения ЭОВМ, реле прямого действия максимального тока РТВ и минимального напряжения РИВ, а также набором блок-контактов командно-сигнального аппарата КСА.
В двух крайних фазах — желтой (ж) и красной (к) установлены трансформаторы тока: 1TT и 2ТТ, которые служат для присоединения реле максимального тока РТВ, реле контроля пускового тока РПТ и счетчика СЧР, зачитывающего количество пусков и часов работы землесоса под нагрузкой.
Технологическая группа грунтового насоса, как указано выше, включает в себя также насос с задвижки системы вспомогательного водоснабжения.
Схема управления приводами систем вспомогательного водоснабжения показана на рис. 10-17.
В силовых цепях схемы установлены автоматические воздушные выключатели со встроенной токовой защитой IA и 2А. Для управления электродвигателями привода задвижек ДЗЭ и ДЗО применены реверсирующие контакторы ЭО, ЭЗ и ОО, ОЗ. В силовой цепи двигателя вспомогательного насоса установлен нереверсивный контактор НВ.
Управление приводами гидромеханической группы грунтового насоса уясняется из совместного рассмотрения схемы привода грунтового насоса (рис. 10-16) и приводов вспомогательного водоснабжения (рис. 10-17).
Режим управления гидромеханической группой грунтового насоса определяется одним из трех фиксированных положений универсального переключателя 1УП (рис. 10-16,г).
Рассмотрим в отдельности режимы работы системы.
- Автоматический пуск без предварительного набора вакуума. Рассматриваемый режим-автоматического управления грунтовым насосом имеет место, когда переключатель 1УП находится в таком положении, при котором замкнуты его контакты I, II, V и VI.
При нажатии на кнопку Пуск (рис. 10-16) через контакты КСА и кнопки Стоп получает питание катушка реле пуска грунтового насоса РПГ. Контакты кнопки при этом блокируются контактами реле РПГ. Двигатель ДП механизма масляного выключателя получает питание и, вращаясь, растягивает пружины, подготавливая привод к включению выключателя ВМ. Одновременно реле РПГ другой парой контактов
включает катушку реле пуска вспомогательного насоса РПН, которое двумя парами контактов замыкает цепь контактора задвижки открытия эжекторной линии ЭО и катушки контактора насоса (рис. 10-17). Привод вспомогательного насоса включается, и одновременно открывается задвижка на водяной линии эжектора.
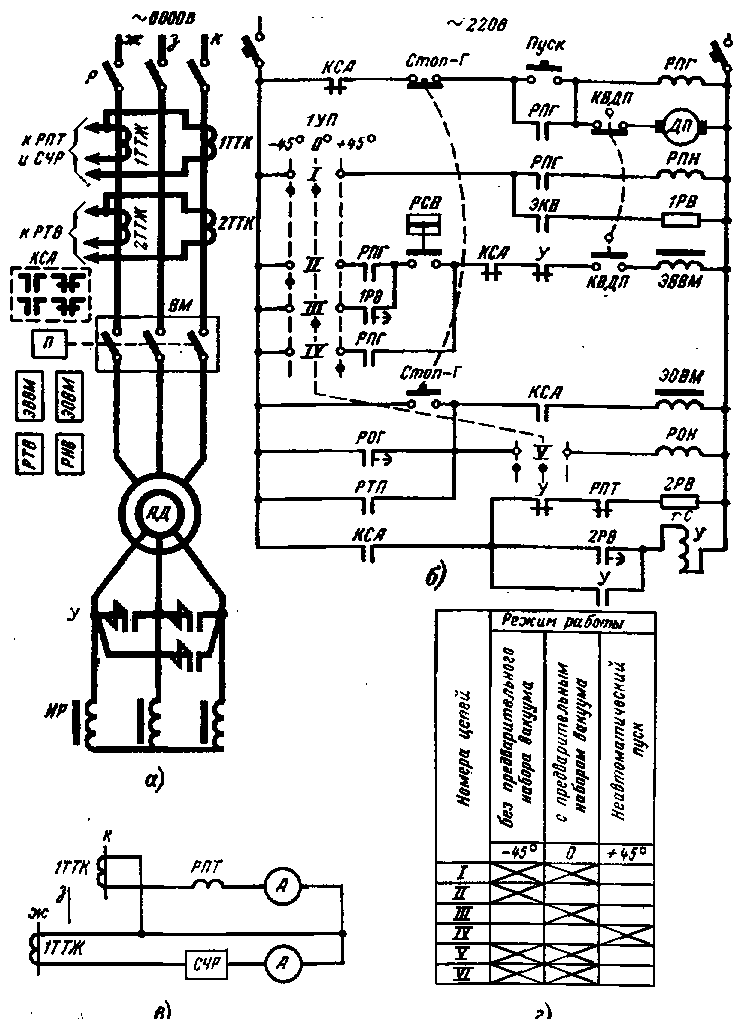
Рис. 10-16. Схема автоматизированного управления асинхронным двигателем привода грунтового насоса.
а — схема силовых целей; б — схема цепей управления; в — схема цепей защиты, измерений и счетчики числа часов работы привода; г — диаграмма переключателя 1УЯ; АД — двигатель главного привода; ДП — двигатель натяжения пружин привода масляного выключателя.
Вращение двигателя эжекторной задвижки ДЗЭ происходит вплоть до размыкания контактов конечного выключателя открытия задвижки КВЭО или контактов муфты максимального момента ВМЭО, разрываемых при перегрузке двигателя. Кроме того, реле РПН через пару контактов включает катушку контактора открытия задвижки отжима ОО.
Таким образом, в данном режиме нажатие кнопки Пуск грунтового насоса приводит в действие систему вспомогательного водоснабжения без выдержки времени.
Двигатель ДП, растягивающий пружину привода, вращается до отключения его выключателем конечного положения механизма привода КВДП, соответствующего необходимому натяжению пружин. Одновременно в том же конечном положении замыкаются размыкающие контакты КВДП, подготавливающие цепь электромагнита ЭВВМ дистанционного включения масляного выключателя. Разрешающий импульс на включение главного двигателя АД привода грунтового насоса подается от струйного реле РСВ, которое устанавливается на линии отжима; его замыкающие контакты в схеме рис. 10-16 замыкаются при подаче воды в соответствующие зоны грунтового насоса.

Рис. 10-17. Схема автоматического управления двигателями привода задвижек и насоса вспомогательного водоснабжения. ДЗЭ — двигатель привода задвижек эжектора; ДЗО — двигатель задвижки отжимной воды: ДНВ — двигатель насоса вспомогательного водоснабжения.
При наличии струи отжимной воды контакты РСВ замыкают цепь электромагнита включения масляного выключателя ЭВВМ, который, воздействуя на расцепитель привода, освобождает энергию растянутых пружин и приводит в движение механизм замыкания контактов ВМ.
Одновременно размыкаются размыкающие контакты КСА, разрывая цепи отработавших элементов схемы.
По завершении процесса пуска грунтового насоса необходимо прекратить непроизводительный расход воды через эжектор. Для этого- следует закрыть задвижку магистрали эжектора, что достигается автоматически следующим образом.
На всасывающей трубе грунтового насоса установлен электроконтактный вакуумметр ЭКВ, контролирующий разрежение в корпусе- грунтового насоса. По достижении определенного значения вакуума, обеспечивающего заполнение корпуса насоса водой, датчик разрежения ЭКВ замыкает свои контакты в цепи реле времени 1РВ (рис. 10-16), последнее с выдержкой времени замыкает контакты в цепи катушки ЭЗ— контактора привода задвижки эжекторной линии (рис. 10-17)Главные контакты контактора ЭЗ замыкаются, и привод получает вращение на закрытие задвижки. Вращение привода продолжается до тех пор, пока конечный выключатель положения или выключатель предельного момента не разорвет цепь контактора ЭЗ.
Выдержка времени необходима для того, чтобы предотвратить ложное срабатывание привода задвижки от колебания показаний вакуумметра при неустойчивом разрежении в процессе пуска.
Вместо датчика вакуума может быть использован датчик давления, устанавливаемый на напорной трубе грунтового насоса. Образование- устойчивого давления в пульпопроводе также служит признаком перехода грунтового насоса к установившемуся гидравлическому режиму.
В конце переходного периода разбега двигателя грунтового насоса должен включиться контактор У, шунтирующий индукционный реостат ИР в цепи ротора. Длительность переходного процесса составляет 6— 8 с, поэтому интервал времени между включениями ВМ масляного выключателя и контактора У не должен превышать 8 с. Необходимая выдержка времени осуществляется при помощи реле времени 2РВ. Отрегулированное на необходимое время срабатывания реле 2РВ замыкает свои контакты в цепи контактора У. Последний, включаясь замыкает свои главные контакты в цепи ротора; при этом его замыкающие контакты шунтируют контакты реле времени. Реле 2РВ отключается размыкающими контактами контактора У.
Время включения контактора У контролируется, кроме того, размыкающими контактами реле тока РПТ, благодаря которым реле 2РВ не включается до тех пор, пока пусковой ток двигателя не спадает до установленного значения.
В цепях первой группы вторичных обмоток трансформаторов тока работают также счетчик числа пусков и часов чистой работы грунтового насоса и амперметры для контроля нагрузки двигателя привода.
Схема управления предусматривает остановку грунтового насоса, намеренную либо автоматическую — при возникновении ненормальных режимов работы.
Намеренная остановка грунтового насоса производится нажатием на кнопку Стоп-Г (Стоп грунтового насоса). При этом подается напряжение на катушку ЭОВМ электромагнита отключения масляного выключателя.
При нажатии на кнопку Стоп-Г одновременно с замыканием контактов в цепи электромагнита ЭОМВ открываются размыкающие контакты кнопки в оперативных цепях пуска, чем обеспечивается взаимная
блокировка цепей включения и отключения. При размыкании главных контактов масляного выключателя блок-контакты КСА восстанавливают исходное состояние схемы управления грунтового насоса, отключая в том числе замыкающий контактор У ротора.
Намеренная остановка грунтового насоса влечет за собой отключение вспомогательного насоса и закрытие задвижки на магистрали отжимной воды; то и другое происходит автоматически при нажатии кнопки Стоп-Г (рис. 10-16 и 10-17). При замыкании контактов Стоп-Г одновременно с катушкой отключающего электромагнита ЭОВМ через контакты Y универсального переключателя 1УП получает питание реле отключения насосов РОИ. При размыкании размыкающих контактов РОИ катушка контактора ИВ теряет питание и двигатель насоса отключается.
Одновременно размыкающие контакты ИВ в цепи катушки 03 включают двигатель ДЗО привода задвижки отжима на ее закрытие. Как показано выше, закрытие эжекторной магистрали уже совершилось ранее, по окончании пуска грунтового насоса; поэтому схема управления системой оказывается полностью приведенной в исходное состояние.
Автоматическая остановка грунтового насоса, так же как и намеренная, происходит при включении электромагнита ЭОВМ. Из рассмотрения схемы видно, что катушка электромагнита отключения может получать питание помимо кнопки Стоп-Г через замыкающие контакты РТП или РОЗ.
РТП — реле контроля температуры подшипников — представляет собой датчик конструкции, подобной описанному в § 4-1. Контакты РТП замыкаются при повышении предельно допустимого значения температуры подшипников. Чувствительный элемент датчика должен находиться в непосредственном контакте с подшипниками, температура которых служит параметром, воздействующим на работу схемы. Датчиков может быть установлено несколько, если контролируются, например, температура подшипников как грунтового насоса, так и двигателя. В этом случае контакты датчиков в схеме управления включаются параллельно.
Замыкание контактов температурного реле РТП, включенных параллельно кнопке Стоп-Г, влечет за собой точно те же переключения в схеме управления, что и при намеренном замыкании контактов кнопки, рассмотренном выше.
Схема предусматривает автоматическую остановку грунтового насоса при прекращении подачи отжимной воды по любым причинам. В схеме рис. 10-17 показана цепь, контролирующая подачу воды отжима, состоящая из размыкающих контактов струйного реле РСВ, катушки реле контроля струи отжима РКС и контактов VI переключателя 1УП. При отсутствии подачи отжимной воды в корпус грунтового насоса контакты РСВ замыкаются и реле контроля РКС получает питание; своими контактами оно с выдержкой времени замыкает цепь катушки реле отключения грунтового насоса РОГ. Последнее, в свою очередь, своими контактами, параллельными кнопке Стоп-Г, замыкает цепь катушки электромагнита отключения ЭОВМ. Дальнейшая работа схемы происходит в последовательности, рассмотренной ранее.
- Автоматический пуск грунтового насоса с предварительным набором вакуума. Такой режим обеспечивается положением переключателя 1УП, при котором замкнуты его контакты I, III, V и VI. Пуск двигателя происходит аналогично режиму без предварительного набора вакуума, с той разницей, что моменты включения вспомогательного насоса и двигателя грунтового насоса разделены интервалом времени, обусловленным длительностью заполнения корпуса насоса водой.
Образование необходимого разрежения в корпусе грунтового насоса (набор вакуума) контролируется электроконтактным вакуумметром ЭКВ, замыкание контактов которого подает напряжение на катушку реле времени IPB. Замыкание контактов IPB с выдержкой времени обусловливает подачу импульса на срабатывание электромагнита эввм.
Из рассмотрения схем управления (рис. 10-16 и 10-17) -видно, что положение переключателя 1УП, определяющее любой из двух режимов автоматического пуска, не влияет на последовательность и порядок срабатывания цепей управления при отключении двигателя АД привода грунтового насоса. Поэтому остановка насоса осуществляется так же, как в предыдущем случае.
- Режим неавтоматического. (ручного) управления в автоматизированных системах предусматривается для наладки схем и испытательных работ. В режиме неавтоматического (ручного) управления могут быть включены и выключены независимо друг от друга все звенья гидромеханической системы: грунтовой насос, насос вспомогательного водоснабжения и задвижка. Этот режим обеспечивается положением переключателя 1УП, когда замкнуты лишь контакты IV. Остальные контакты 1УП разомкнуты, чем нарушается электрическая связь схемы управления грунтовым насосом (рис. 10-16) со схемой управления звеньями вспомогательного водоснабжения (рис. 10-17), осуществляющая автоматику.
В режиме неавтоматического управления исключается работа реле пуска вспомогательных насосов РПН, контроль разрежения ЭКВ и контроль подачи отжимной воды (реле РСВ, РКС и РОГ). Грунтовой насос может быть включен в работу при бездействующем вспомогательном насосе. Приводы каждой из задвижек могут быть включены независимо и отключены своими кнопками управления. В схеме сохраняются элементы защиты главного двигателя от перегрузки, перегрева подшипников и минимального напряжения, осуществляемые соответствующими реле, и токовая защита вспомогательных двигателей автоматами в силовых цепях. Остаются неизменными также электрические блокировки реверсирования задвижек и блокировка их крайних положений (размыкающие контакты ЭЗ и ЭО, ОЗ и ОО, конечные выключатели и выключатели предельного момента задвижек).
Автоматизированное управление электроприводом лебедок грунтозаборного устройства
Грунтозаборное устройство землесосных снарядов с рыхлителем монтируется на поворотной раме (см. рис. В-2). При помощи особой лебедки, путем подъема или опускания рамы, глубина погружения грунтозаборного устройства может изменяться в определенных пределах.
Положение всасывающей трубы определяет величину концентрации гидросмеси. Исходя из всасывающей способности грунтового насоса, последняя может оказаться выше допустимой, что приводит к срыву вакуума и резкой вибрации установки.

Рис. 10-18. Жалюзийный затвор на всасывающей трубе землесосного снаряда.
В качестве меры по предотвращению срыва вакуума служит искусственное изменение соотношения твердой фазы и воды в сторону уменьшения консистенции гидросмеси. Понижение консистенции гидросмеси может быть достигнуто двумя путями — увеличением притока воды через особую жалюзийную решетку, устанавливаемую на вырезе боковой поверхности трубы, либо поднятием всасывающей трубы для удаления ее приемного отверстия от поверхности разрабатываемого грунта.
С точки зрения непрерывности режима, первый способ предпочтительнее; он позволяет в кратчайшее время восстанавливать работу грунтового насоса. Однако в некоторых случаях, дополнительный приток воды через жалюзи не обеспечивает разгрузки всасывающей трубы и приходится прибегать к отрыву наконечника и выводу его из зоны грун- тозабора.
Автоматизированное управление электроприводами грунтозаборного устройства кроме ручного управления опусканием и подъемом всасывающей трубы должно предусматривать независимое от оператора исполнение следующей программы. При повышении консистенции гидросмеси сверх заданного предела автоматически открывается жалюзийный затвор на всасывающей трубе. Если после этого консистенция в пределах заданного времени не убывает, всасывающее устройство автоматически поднимается, выводя отверстие трубы из зоны грунтозабора.
Затвор на всасывающей трубе, работающий по принципу жалюзи (рис. 10-18), состоит из ряда подвижных пластин, одновременно поворачивающихся на некоторый угол при поступательном смещении тяги в ту или другую сторону вдоль своей оси. Приводом жалюзи служит асинхронный двигатель с промежуточным трансмиссионным механизмом, преобразующим вращение двигателя в поступательное движение тяги.
Схема автоматического управления приводами грунтозаборного устройства показана на рис. 10-19.
Двигатель АДР лебедки подъема и опускания рамы, несущей всасывающую трубу грунтового насоса, управляется реверсивными контакторами КРВ (контактор рамы — вверх) и КРН (контактор рамы — вниз). Одновременно с включением двигателя напряжение подается на трехфазный магнит, разжимающий колодки тормоза рамной лебедки. Тормоз необходим для предотвращения саморазворачивания лебедки под действием веса рамы.
Двигатель жалюзи АДЖ также управляется реверсивными контакторами. В зависимости от направления вращения двигателя жалюзи затвора открываются (контактор КЖО) или закрываются (контактор КЖЗ).
Включение силовых цепей привода и их защита осуществляются автоматами А1 и А2.
Схема предусматривает режимы управления: 1) неавтоматический и 2) автоматический.
- Неавтоматическое управление двигателями с помощью выключателей с нефиксируемыми контактами.
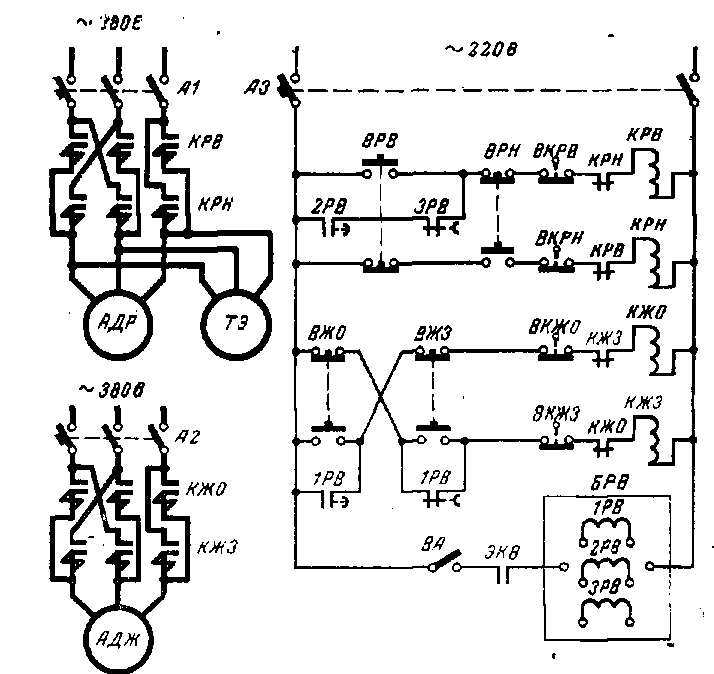
Рис. 10-19. Схема управления приводом рамоподъемной лебедки с автоматизированным действием затвора.
Двигатель лебедки АДР включается педальными выключателями: ВРВ — на подъем и ВРН — на опускание. Длительность работы двигателя АДР определяется продолжительностью нажатия на педали.
Двигатель затвора управляется кнопками ВЖО и ВЖЗ: первая включает контактор открытия жалюзи, вторая — контактор закрытия. Длительность работы двигателя привода жалюзи определяется продолжительностью нажатия кнопки. Блокировка реверса двигателя осуществлена, как обычно, вторыми размыкающими контактами кнопок и выключателей, кроме того, размыкающими контактами реверсивного контактора. Для отключения двигателя АДР в крайних положениях рамы используются конечные выключатели: ВКРВ (верхнее положение) и ВКРН (нижнее положение). Воздействие на конечный выключатель нижнего положения грунтозаборного устройства осуществляется датчиком ослабления троса рамного полиспаста (см. § 4-1).
Конечные выключатели ВКЖО и ВКЖЗ служат для отключения двигателя АДЖ в крайних положениях при открывании и закрывании затвора.
- При автоматическом режиме в схему управления вводится блок реле вакуума БРВ. Последовательно с БРВ включены замыкающие контакты электромагнитного вакуумметра ЭКВ. Автоматика управления грунтозаборным устройством вводится или выводится в действие выключателем автоматики ВА.
Предельное допустимое значение вакуума задается на датчике ЭКВ и фиксируется положением его контактов (см. § 4-1). Когда фактическое значение вакуума достигает заданного контакты ЭКВ замыкаются и включают в работу схемы блок реле БРВ.
Нарушение вакуумного режима грунтового насоса может иметь место только в том случае, когда приемное отверстие всасывающей трубы находится в зоне грунтозабора. Поэтому автоматика поддержания допустимого разрежения начинает функционировать при опущенной раме. В связи с этим схема предусматривает неавтоматическое опускание рамы включением контактора КРН кнопкой ВРН независимо от режима. Действие автоматического управления грунтозаборным устройством рассматривается исходя из того, что рама опущена и приемное отверстие находится в зоне грунтозабора.
Действие реле БРВ основано на принципе последовательной подачи команд при превышении заранее заданного значения вакуума. Блок БРВ состоит из трех реле времени, действующих ступенями в следующем порядке.
а) Реле первой ступени 1РВ срабатывает через 4—8 с после поступления импульса от вакуумметра ЭКВ, реагирующего на превышение заданного вакуума. Своими замыкающими контактами реле 1РВ подает напряжение на контактор открытия жалюзи. Выдержка времени необходима для того, чтобы исключить ложные срабатывания при кратковременных импульсах разрежения.
б) Реле второй ступени 2РВ с выдержкой времени, регулируемой в пределах до 200 с, контролирует разгрузку всасывающей трубы при промывке ее водой, поступающей через открытый затвор.
При восстановлении допустимого вакуума в пределах времени уставки второй ступени блок реле БРВ отключается контактором ЭКВ; при этом размыкающие контакты первой ступени 1РВ включают контактор КЖЭ двигателя жалюзи на закрытие, Если за время уставки второй ступени восстановления допустимого вакуума не произошло, закрываются замыкающие контакты 2РВ и одновременно включается третья ступень блока БРВ. Через замыкающие контакты 2РВ подается напряжение на катушку контактора подъема КРВ, и двигатель поднимает всасывающую трубу, выводя ее приемное отверстие из зоны грунтозабора.
в) Реле третьей ступени 3РВ имеет уставку выдержки времени, определяющую время подъема рамы с всасывающей трубой на нужную высоту; выдержка регулируется на время до 20 с. По отработке времени уставки третья ступень своими размыкающими контактами 3РВ размыкает цепь катушки КРВ и движение рамы вверх прекращается.
Далее цикл открытия жалюзи и подъема рамы на следующий уровень повторяется, если в предыдущем цикле восстановления допустимого значения вакуума не произошло.
Автоматизированное управление электроприводом механизма свайного хода
Одним из способов рабочего перемещения плавучих землесосных снарядов в обводненных карьерах, траншеях и пр. является свайнотросовое папильонирование (см. введение, рис. В-3,б).
Функция механизма свайного хода сводится к попеременному опусканию свай в грунт. Электрический привод свайных лебедок служит для подъема и опускания свай с помощью тросовых полиспастов и особых захватов (рис. 10-20,а). Ограничение хода захватов обеспечивается конечными выключателями верхнего и нижнего положений КВЛВ и КВЛН— для левой сваи; КВПВ и КВПН — для правой.
Для привода лебедок используются асинхронные двигатели с коротко- замкнутым ротором ДЛС (левая свая) и ДПС (правая свая), управляемые реверсирующими контакторами (рис. 10-20,б).
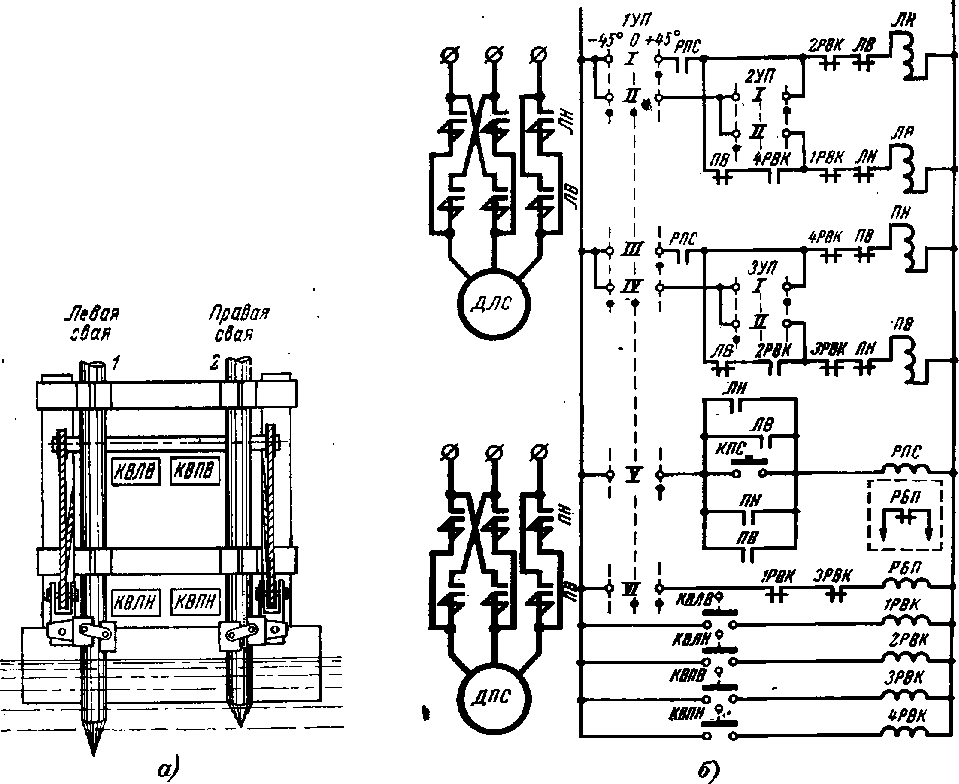
Рис. 10-20. Схема автоматизированного управления приводом лебедок свайного механизма.
а —устройство свайного механизма с расположением конечных выключателей; б —схема управления.
Схема управления предусматривает режимы раздельного управления приводом каждой лебедки, а также автоматику перекладки свай нажатием одной кнопки.
Режимы работы приводов определяются одним из трех положений переключателя режима 1УП.
- Переключатель 1УП установлен в положение «О». Этому положению соответствует режим раздельного управления обеими лебедками. Кроме того, в схему введена блокировка папильонирования при обеих опущенных сваях. Операции подъема и опускания осуществляются переключателями: 2УП для левой сваи и ЗУП — для правой.
- Переключатель повернут в положение +45°. Цепи управления, замыкаемые контактами переключателя в этом положении, определяют режим автоматической перекладки свай, осуществляемой нажатием кнопки КПС. В режиме автоматики также действует блокировка папильонажных движений корпуса землесосного снаряда. Переключатели независимого управления лебедками 2УП, 3УП в данном режиме выводятся из действия.
- В положении переключателя —45° исключается блокировка свайного хода с палильонажными лебедками; при этом сохраняется возможность независимого и раздельного управления сваями. Режим, определяемый данным положением переключателя, отличается от первого (положение «О») лишь отсутствием блокировки папильонажных двигателей, что бывает необходимо при производстве наладочных работ и при некоторых маневровых перемещениях землесосного снаряда.
Действие конечных выключателей одинаково для всех режимов; они имеют по одной паре замыкающих контактов в цепях промежуточных реле 1РВК—4РВК. Назначение промежуточных реле — размножение сигнала датчиков положения (конечных выключателей). Промежуточные реле-размножители имеют замыкающие и размыкающие контакты в цепях управления свайными лебедками и блокировочной цепи свайного хода с палильонажными лебедками плавучего земснаряда.
Работа схемы в неавтоматическом режиме проста и в подробном пояснении не нуждается. В положении «О» переключателя 1УП реле РПС автоматической перекладки свай выведено из действия контактами V переключателя 1УП, и замыкание цепей тока определяется положением переключателей 2УП и 3УП. Взаимная блокировка реверсивных контакторов осуществляется размыкающими блок-контактами. Вертикальное перемещение свай ограничивается конечными выключателями через промежуточные реле.
Для пояснения автоматизированного управления механизмом свайного хода действие схемы рассматривается на конкретном примере.
Пусть корпус землесосного снаряда под действием натяжения троса правой папильонажной лебедки совершает правый (если смотреть со стороны кормы на носовую часть корпуса) поворот. Такой поворот производится вокруг правой сваи, опушенной в грунт. По достижении корпусом земснаряда крайнего правого положения, предусмотренного профилем выемки (или границей разработки карьера), должно происходить перекладывание свай, т. е. в этом положении правую сваю следует поднять и опустить левую, относительно которой земснаряд будет поворачиваться влево под действием натяжения троса левой папильонажной лебедки.
В режиме автоматической перекладки замкнуты контакты I, III, V и VI переключателя 1УП. Переключатели 2УП и 3УП выведены из действия разомкнутыми контактами II и IV переключателя 1УП.
В крайнем правом положении корпуса, в момент, предшествующий перекладке свай, замкнуты контакты конечного выключателя КВПН (правая свая находится в нижнем положении) и катушка реле 4РВК получает питание, вследствие чего замыкаются контакты 4РВК в цепи катушки контактора ЛВ и размыкаются контакты 4РВК в цепи катушки контактора ПН, управляющего движением правой сваи вниз. Замкнуты также контакты конечного выключателя КВЛВ, так как левая свая занимает верхнее положение. Якорь реле 1РВК притянут, и его контакты разомкнуты в цепи катушки ЛВ. Таким образом, реверсивные контакторы обоих двигателей отключены.
Для перекладки свай следует нажать кнопку КПС, что влечет за собой втягивание реле РПС, замыкающего свои контакты в цепях автоматики обеих групп реверсивных контакторов. Если проследить далее по всем четырем цепочкам контакторов лебедок, окажется, что замыкание тока возможно лишь в цепи контактора ЛН. Притягиваясь, последний шунтирует кнопку КПС своими замыкающими контактами, н свая опускается вниз, размыкая цепь КВЛВ. Когда левая свая достигнет нижнего положения, конечный выключатель КВЛН через реле 2РВК замкнет цепь контактора ПВ. Двигатель лебедки правой сваи АДПС включается в направлении подъема, и правая свая поднимается вверх до отключения контактора ПВ конечным выключателем КВПВ. Одновременно произойдет деблокировка кнопки КПС разомкнувшимися контактами контактора ЛВ. На этом цикл перекладки свай в правом крайнем положении корпуса земснаряда завершается.
Все реверсивные контакторы привода лебедок отключены. Включены промежуточные реле 2РВК и 3РВК, что обусловлено новым положением свай и их конечных выключателей.
В крайнем левом положении землесосного снаряда при нажатии на кнопку КПС произойдет перекладка свай в обратной последовательности и т. д.
Блокировка папильонажа осуществляется с помощью реле РБП. Если обе сваи опущены на грунт, т. е. находятся в нижнем положении, тогда одновременно разорваны цепи реле 1PBK и 3РВК. Их контакты в цепи блокировочного реле РБП замыкаются и последнее, втягиваясь, разрывает своими размыкающими контактами оперативную цепь привода палильонажных лебедок.
Блокировка палильонажных лебедок не действует только в положении поворота на —45° переключателя 1УП, когда цепь реле РБП разорвана контактами VI переключателя 1УП.