Замкнутая система Г—Д с экскаваторной характеристикой
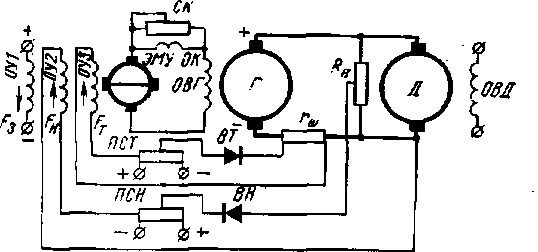
Рис. 10-11. Схема привода Г—Д с ЭМУ и обратными связями по току и напряжению с отсечкой.
На рис. 10-11 представлены основные цепи замкнутой системы управления и регулирования двигателя постоянного тока в системе Г—Д с электромашинным усилителем, обеспечивающей экскаваторную характеристику.
Параметры ЭМУ выбираются так, чтобы м. д. с. задающей обмотки ОУ1 была значительно больше, чем требуется для возбуждения генератора до номинального напряжения.
Отрицательная обратная связь по напряжению вводится в обмотку ОУ2; она создает м. д. с., направленную встречно по отношению к м. д. с. задающей обмотки ОУ1, и компенсирует избыточную м. д. с. задающей обмотки, чем обеспечивается режим возбуждения генератора на уровне номинального. Если в процессе работы привода нагрузка на валу двигателя увеличится, то напряжение обратной связи понизится, и поскольку м. д. с. обмотки ОУ2 вычитается из м. д. с. обмотки ОУ1, результирующая м. д. с. возрастает и напряжение возбуждения генератора повышается, поддерживая тем самым скорость постоянной. Таким путем поддерживается постоянство скорости на рабочей части механической характеристики (участок АВ на рис. 10-8).
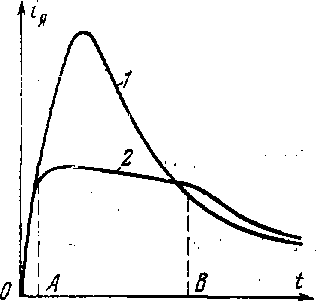
Рис. 10-12. Диаграмма зависимости тока главной цепи Г—Д от времени в переходном процессе.
Взаимодействие м. д, с. задающей обмотки ОУ1 и м. д. с. обмотки обратной связи по напряжению ОУ2, направленное .на поддержание скорости вращения двигателя, имеет место лишь до тех пор, пока напряжение генератора превышает падение напряжения от внешнего источника на потенциометре сравнения ПСН.
При известном значении тока нагрузки напряжение генератора понизится настолько, что напряжение генератора и падение напряжения от внешнего источника на потенциометре сравняются. Несколько опережая этот момент, должна включиться отрицательная обратная связь по току (см. рис. 10-9,а), которая при дальнейшем увеличении тока нагрузки Г—Д вызовет понижение результирующей м. д. с. до полной остановки двигателя (участок ВС на рис. 10-8).
Для рассмотренной системы характерна также благоприятная зависимость тока главной цепи от времени в переходном процессе.
В § 6-6 было указано, что улучшение динамических характеристик привода Г—Д достигается форсировкой переходного процесса. В обычной замкнутой системе, например с обратной связью по скорости; такая форсировка заложена в самом принципе действия системы (ср. рис. 10-2). При пуске двигателя в первый момент напряжение обратной связи по скорости равно нулю и на обмотку возбуждения подается повышенное по сравнению с номинальным, напряжение выхода усилителя, обусловленное напряжением входа на задающей обмотке управления. Для этого момента времени согласно (10-6)![]()
Благодаря применению систем управления электроприводами на постоянном токе с использованием регулируемых усилителей (ЭМУ или МУ) представляется возможным получать статические характеристики требуемой формы, обеспечивая требуемые динамические показатели привода. Однако система, рассмотренная выше, имеет серьезные недостатки, особенно проявляющиеся в схемах реверсивного управления.
Характеристики усилителей таковы, что напряжение выхода на них при разомкнутых обмотках управления может достигать 10—15% номинального. Для компенсации напряжения холостого хода усилителей необходимо вводить сильные обратные связи по напряжению, что снижает коэффициент усиления усилителей. Для получения требуемых значений коэффициента усиления в систему управления вводят дополнительный каскад усиления, в частности, в виде промежуточного магнитного усилителя (ПМУ).
Система МУ—Д с промежуточным магнитным усилителем
Рассматриваемая система ;(рис. 10-13) служит для управления двигателем постоянного тока с реверсированием и регулированием скорости в диапазоне D = 20:1; она предусматривает также отсечку потоку (экскаваторная характеристика). Для стабилизации скорости в схеме применена комбинированная обратная связь по току и напряжению (см. §10-3).
Главными элементами системы являются: силовой магнитный усилитель (дроссель насыщения) с рабочими обмотками ОРД-1—ОРД-3, обмотками управления ОУД-1—ОУД-4 и промежуточный магнитный усилитель ПМУ с рабочими обмотками ОРМ-1—ОРМ-3 и обмотками управления ОУМ-1—ОУМ-6.
Магнитные связи между обмотками на схеме не показаны. Для наглядности, удобочитаемости и компактности чертежа обмотки на схеме располагаются вне зависимости от существующих между ними магнитных связей, с расчетом максимального сокращения графического изображения имеющихся электрических связей.
Питание системы осуществляется от трехфазной сети переменного тока частотой 50 Гц, напряжением 380 В.
При включении автомата А подается напряжение питания на автотрансформатор АТ и трансформатор Т, которые служат для согласования номинальных входных параметров подключаемых к ним элементов системы со стандартным напряжением сети.
Рабочие обмотки дросселя насыщения ОРД-1—ОРД-3 подключаются к обмотке автотрансформатора линейным контактором Л.
Вторичная (трансформаторная) обмотка автотрансформатора АТ через блок выпрямителей В5 служит для питания обмотки возбуждения ОВ двигателя. Реверсирование двигателя осуществляется изменением направления тока в обмотке возбуждения. Узел переключения обмотки возбуждения на схеме не показан1.
1 Для ЭМУ данное обстоятельство обусловлено остаточным магнетизмом, а для МУ — током холостого хода (см. рис. 4-27).
Трансформатор Т служит для питания рабочих обмоток промежуточного магнитного усилителя ΟΡ-1—ОРМ-3 и обмоток управления ДН и ПМУ.
Дроссель насыщения и промежуточный магнитный усилитель имеют внутреннюю обратную связь (см. § 4-4) для обеспечения необходимого коэффициента усиления; обратные связи осуществляются посредством выпрямителей В1 и В2 соответственно.
Выход дросселя насыщения ДН подключен к якорю двигателя, а выход ПМУ— на управляющие обмотки дросселя ОУД-3 и ОУД-4.
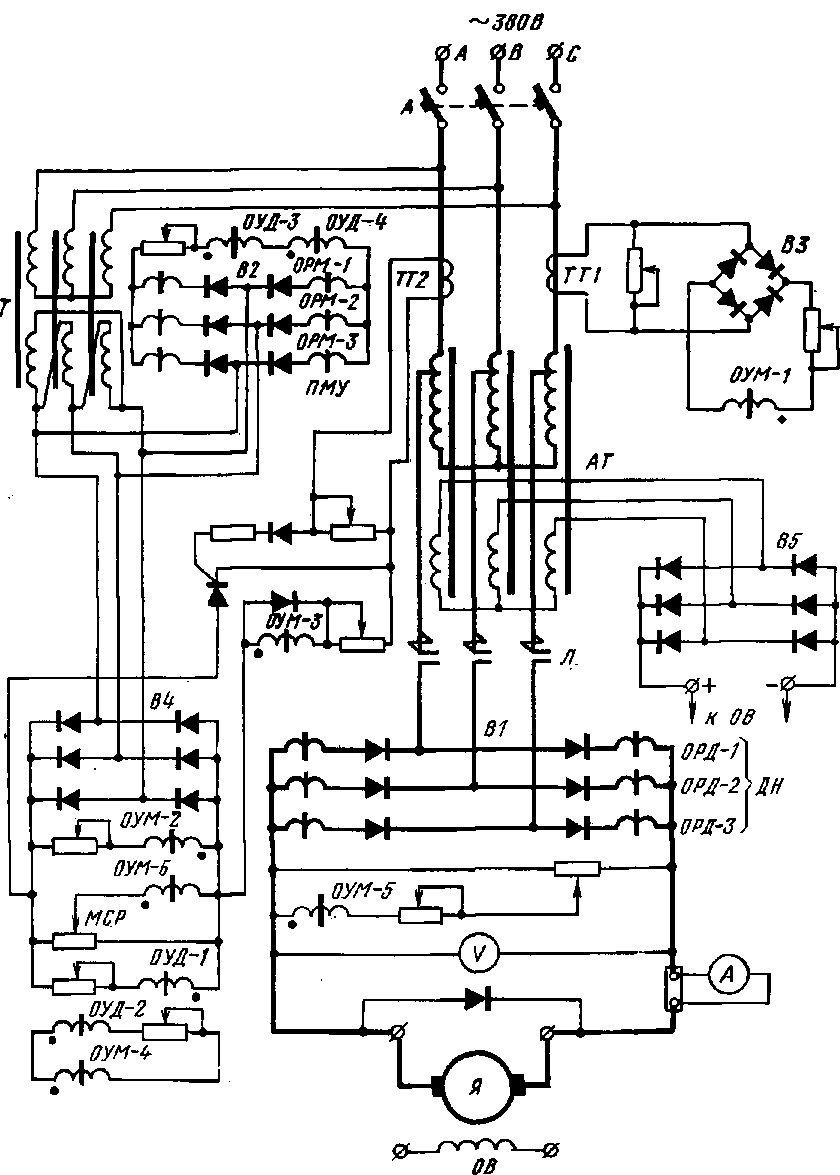
Рис. 10-13. Принципиальная схема дроссельного преобразователя типа ПДК.
Назначение обмоток управления следующее.
Обмотка ОУД-1 используется для смещения характеристик дросселя насыщения (силового магнитного усилителя) ДН (см. § 4-4) и через регулировочное сопротивление включается на выход выпрямителя В4.
Обмотка ОУД-2, включенная последовательно с обмоткой управления ОУМ-4 промежуточного магнитного усилителя, служит для стабилизации работы системы.
Обмотки ОУД-3 и ОУД-4 используются в качестве управляющих обмоток дросселя насыщения.
Обмотка ОУМ-1 промежуточного магнитного усилителя питается через трансформатор тока ТТ-1 и выпрямитель В3; она служит для обратной связи по току нагрузки и является элементом комбинированной обратной связи (см. выше).
Обмотка ОУМ-2 служит для смещения характеристик промежуточного магнитного усилителя и подключена к выходу выпрямителя В4 через регулировочное сопротивление.
Обмотка О УМ-3 обеспечивает отсечку механической характеристики привода по току нагрузки (см. рис. 10-10).
Обмотка ОУМ-4 совместно с ОУД-2 способствует стабилизации работы системы.
Обмотка ОУМ-5 осуществляет обратную связь по напряжению, являющуюся вторым элементом комбинированной обратной связи.
Обмотка ОУМ-6 служит для управления системой — плавным регулированием скорости двигателя посредством потенциометра МСР.
Рассмотренная система с небольшими изменениями применяется для регулируемого привода папильонажных лебедок землесосных снарядов.
Промышленность изготовляет блоки дроссельных преобразователей серии ПДК, выполненные по схеме, показанной на рис. 10-13, типов ПДК-7, ПДК-10 и ПДК-20 на токи нагрузки соответственно 22,5; 38 и 68 А.
В качестве основного регулятора скорости, воздействующего на обмотку управления системой ОУМ-6, может служить бесконтактный сельсинный регулятор, включаемый в сеть переменного тока через выпрямитель.
Схема управления электроприводом на переменном токе с индукторной муфтой скольжения
Рассматриваемая схема позволяет получить семейство жестких характеристик привода с отсечкой по заданному максимальному значению передаваемого момента.
Как показано на схеме (рис. 10-14), привод механизма М осуществляется от двигателя Д, вращающегося с постоянной скоростью, через индукторную муфту скольжения ИМС. Регулирование скорости производится путем изменения тока, протекающего в обмотке возбуждения индукторной муфты ОВИМС. Последняя включена на выходе дросселя насыщения ДН.
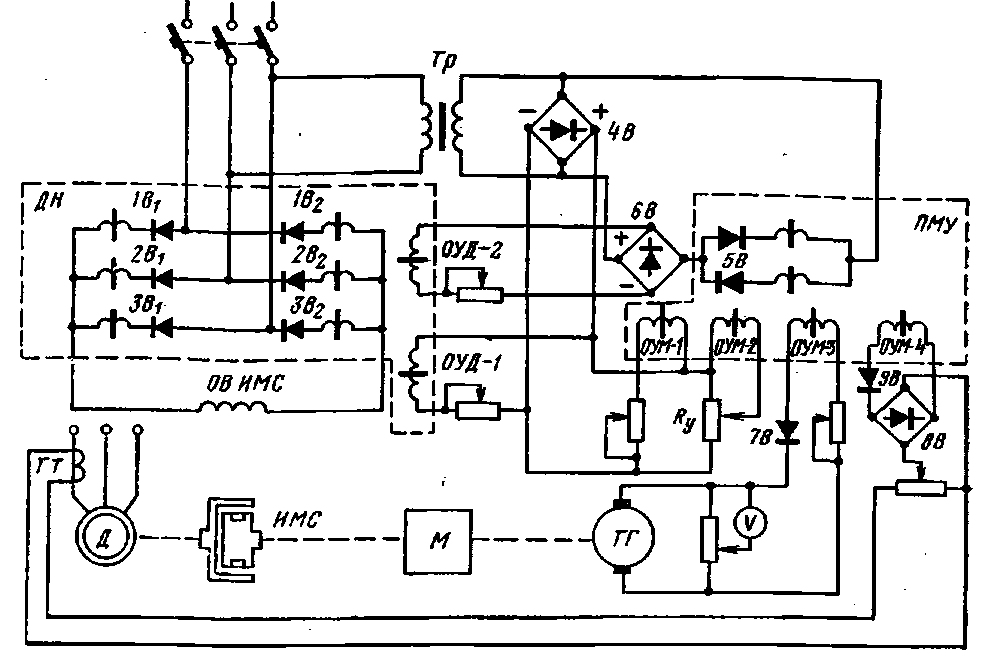
Рис. 10-14. Принципиальная схема системы регулирования электропривода с ИМС.
Необходимое значение коэффициента усиления дросселя обеспечивается внутренней положительной обратной связью с помощью вентилей 1B, 2В, 3В.
Режим работы дросселя насыщения определяется значениями м. д. с. его управляющих обмоток ОУД-1 и ОУД-2. Обмотка ОУД-1 служит для смещения характеристик дросселя; она через регулировочное сопротивление включена на выход выпрямителя 4В. Обмотка ОУД-2 является задающей; ее м. д. с. определяет значения тока на выходе дросселя насыщения, а следовательно, на обмотке возбуждения ИМС. Ток управления дросселем подается на обмотку ОУД-2 от рабочих обмоток промежуточного магнитного усилителя ПМУ через выпрямитель 6В.
Промежуточный магнитный усилитель совместно с дросселем насыщения позволяет получить высокий коэффициент усиления по мощности и, следовательно, значительно снизить ток управления приводом. Кроме того, на управляющих обмотках ПМУ осуществляется сравнение задающей м, д. с. с м. д. с. обратной связи по скорости и м. д. с. обмотки, обеспечивающей отсечку по заданному моменту.
Управляющие обмотки имеют следующее назначение:
обмотка ОУМ-t служит для смещения характеристик ПМУ;
обмотка ОУМ-2 является задающей. С помощью регулируемого сопротивления Rу производится уставка необходимой скорости вращения привода;
обмотка ОУМ-3 служит для отрицательной обратной связи по скорости. Разность м. д. с. задающей обмотки и отрицательной обратной
связи по скорости определяет выходкой ток ПМУ, т. е., в конечном счете, ток в обмотке возбуждения ИМС, обеспечивающий стабилизацию скорости привода (см. § 10-2);
обмотка ОУМ-4 обеспечивает экскаваторную характеристику привода (отсечку по максимальному моменту). Эта обмотка включена в цепь трансформатора тока ТТ через выпрямитель 8В; ее м. д. с. направлена встречно по отношению к м. д. с. задающей обмотки ОУМ-2.
Последовательно с обмоткой ОУМА включены вентили 9В. В схеме использована нелинейность сопротивлений этих вентилей в проводящем направлении. Набором нужного числа вентилей регулируется напряжение, при котором в обмотке ОУМ-4 будет протекать ток.
Рассмотренная схема применяется в гидромеханизации для привода фрез рыхлителей плавучих землесосных снарядов.