К оперативным лебедкам следует относить тяговые и подъемные механизмы, предназначенные для рабочих перемещений земснаряда и грунтозаборного устройства: папильонажные и становые лебедки, рамоподъемные и сваеподъемные лебедки земснарядов, а также механизм подъема всасывающей трубы стационарных грунтонасосных установок (см. введение, рис. В-1, В-2 и В-3).
Папильонажные лебедки
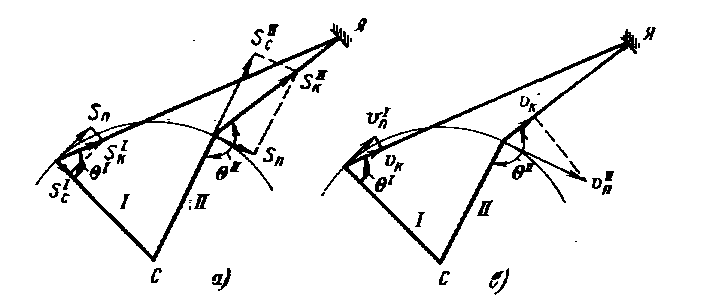
Рис. 8-3. Соотношение усилий (а) и скоростей (б) на тросе и грунтозаборном устройстве при свайном папильонировании землесосного снаряда.
I, II— первое в второе положения папильонажного каната при повороте корпуса снаряда около сваи С; Я —якорь папильонажного каната.
Расчет нагрузок и момента сопротивления папильонажных лебедок не может быть выполнен однозначно. Указанные величины зависят от геометрических соотношений, определяющих взаимное расположение оси корпуса земснаряда и точек заложения тросовых якорей (см. рис. В-3), сопротивления грунта резанию и других факторов. В процессе перемещения земснаряда при любом способе папильонирования эти величины непрерывно изменяются; следователь, но, изменяется также и нагрузка лебедок.
Характер нагрузки папильонажных лебедок можно пояснить на примере следующих общих рассуждений.
На рис. 8-3 показано расположение папильонажных тросов для разных углов поворота земснаряда относительно точки С при свайном папильонировании. В обоих положениях приняты одинаковые значения сопротивления грунта SП (рис. 8-3,а). При этом усилия в канате SIK и SIIК, являющиеся равнодействующими сил Sп и Sc (усилие
на сваю), резко отличаются одно от другого:
![]()
(8-14)
На практике двигатели привода папильонажных лебедок выбираются по наиболее тяжелому режиму на основании опытно-статистических данных, с использованием некоторых расчетных соотношений известных по данным продолжающегося изучения и развития теории разработки грунтов землесосными снарядами.
Режим работы привода папильонажных лебедок характеризуется непостоянством его нагрузки и относится к виду продолжительных непрерывно-циклических режимов.
Особенности режима следующие.
- Опытом установлено, что наивысшая производительность и качество разработки выемок землесосными снарядами достигаются непрерывным папильонированием при низких, так называемых ползучих скоростях, при оптимальной загрузке рыхлителя и грунтового насоса. Например, при общей высоте песчаного забоя до 10 м наивыгоднейшая скорость папильонирования не превышает 0,4—0,5 м/мин. С другой стороны, для папильонажных лебедок предусматриваются маневровые скорости без нагрузки, превышающие рабочую скорость в 15—20 раз. При этих условиях для привода папильонажных лебедок целесообразно применение двигателей с глубоким регулированием скорости D= 12:15.
- Режимом папильонирования предусматривается реверсирование двигателя.
- Привод папильонажных лебедок может испытывать непредвиденное возрастание нагрузок вследствие возможного наличия в забое неперерабатываемых включений: затонувшие стволы деревьев, скальные и другие твердые породы.
Электропривод папильонажных лебедок на большинстве ранее выпущенных землесосных снарядов, работающих в строительстве, выполнен с одно- или многоскоростными асинхронными двигателями с коротко- замкнутым ротором общепромышленных серий.
Вследствие очевидных преимуществ привода с глубоким и плавным регулированием скорости, а также перспективы автоматизации землесосных снарядов, в настоящее время внедряются двигатели постоянного тока, работающие в системах Г—Д, МУ—Д и др.
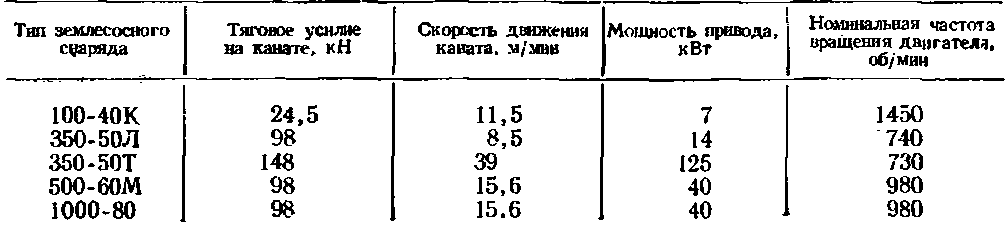
В табл. 8-4 приводятся примерные технические данные, характеризующие привод папильонажных лебедок для землесосных снарядов различных типов.
Таблица 8-4

Примечание. Указанные значения частоты вращения для двигателей постоянного тока являются номинальными; для асинхронных двигателей они соответствуют синхронной частоте вращения.
Становые лебедки
Становые лебедки применяются при тросовом папильонировании (см. рис. В-3,а) и при разработке грунтов траншейным способом (при рабочем перемещении землесосного снаряда вдоль его оси). При этом чаще всего носовая лебедка работает в упор к фронту забоя и несет нагрузку, обусловленную сопротивлением грунта, а кормовая обеспечивает маневровые движения корпуса земснаряда. В исключительных случаях кормовая становая лебедка используется для оттягивания корпуса земснаряда назад, освобождая его всасывающий орган из-под обвалов грунта. По этим соображениям носовая и кормовая лебедки практически выполняются одинаковыми.
Рабочее время нагрузочного цикла становых лебедок непродолжительно, и электропривод этих лебедок работает в повторно-кратковременном режиме.
Для привода становых лебедок обычно применяют асинхронные двигатели с короткозамкнутым ротором.
Рамоподъемные лебедки
Работа рамоподъемной лебедки определяет глубину погружения всасывающего устройства землесосных снарядов (см. рис. В-2), от которой также зависит подача грунтового насоса в каждый данный момент времени.
Нагрузка привода рамоподъемных лебедок зависит от веса рамы и кинематических параметров грузоподъемного устройства, а мощность, кроме того, определяется скоростью подъема рамы.
Режим привода рамоподъемной лебедки характеризуется следующим.
- В обычных условиях привод лебедок работает в повторно-кратковременном режиме. Длительность рабочего времени цикла обусловлена незначительной высотой хода рамы и поэтому невелика.
- При возможном завале рамы грунтом момент сопротивления, обусловленный весом поднимаемого груза, значительно возрастает и привод оказывается в режиме перегрузки.
- Привод, как правило, работает с большой частотой включений.
- Регулирования скорости привода не требуется.
- Для привода лебедок предусматривается реверсирование двигателя.
Электропривод рамоподъемных лебедок выполняется с асинхронными двигателями с короткозамкнутым ротором.
Таблица 8-5
При этом обязательна проверка двигателя по допустимой частоте включений и перегрузочной способности
В табл. 8-5 приводятся данные для рамоподъемных механизмов.
Привод механизма подъема всасывающего пульпопровода грунтонасосных установок (см. рис. В-1) аналогичен приводу рамоподъемных лебедок. Отличие состоит в отсутствии перегрузок, вызываемых завалом трубы грунтом, так как это явление при гидромониторных работах места не имеет.
В качестве двигателя привода применяются асинхронные двигатели с короткозамкнутым ротором мощностью до 10 кВт.
Лебедки механизма свайного хода
Нагрузка свайных лебедок определяется весом свай, а мощность двигателей привода — весом свай и скоростью их подъема.
Режим привода свайных лебедок кратковременный с постоянным значением момента в рабочее время циклов. В момент отрыва свай возможна перегрузка двигателя вследствие всасывания наконечника сваи грунтом. Привод работает с реверсированием.
Двигателями привода свайных лебедок обычно служат асинхронные двигатели с короткозамкнутым ротором. Технические данные привода совпадают с данными для рамоподъемных лебедок, кроме земснаряда 350—50 Т, где мощность двигателя составляет 55 кВт при частоте вращения 740 об/мин.