ЭЛЕКТРОПРИВОД УСТАНОВОК ГИДРОМЕХАНИЗАЦИИ И СИСТЕМЫ УПРАВЛЕНИЯ
Глава восьмая
ХАРАКТЕРИСТИКА НАГРУЗОК И ПРИВОДА УСТАНОВОК ГИДРОМЕХАНИЗАЦИИ
3-1. ОБЩИЕ СВЕДЕНИЯ О РАБОТЕ ПРИВОДА В ГИДРОМЕХАНИЗАЦИИ
Во введении были изложены вопросы использования гидромеханизации при производстве различных работ. Любая установка гидромеханизации представляет собой совокупность нескольких механизмов, выполняющих различные функции.
Соответственно назначению любого из механизмов к его приводу предъявляются особые требования, обусловленные различными режимами работы каждого из них.
Приводы гидромеханизации различаются по мощности и напряжению электродвигателей. Режим работы привода также различен для разных механизмов; он может быть длительным, кратковременным или повторно-кратковременным. Одни электроприводы по технологическим особенностям работы отдельных механизмов требуют реверсирования и регулирования скорости; другие работают при неизменном направлении вращения и не требуют регулирования скорости.
К важнейшим механизмам, участвующим в производстве гидромеханизированных работ, относятся водяные и грунтовые насосы, тяговые и подъемные лебедки, устройства механического рыхления грунта, дистанционно управляемые гидромониторы и задвижки.
Ниже дается характеристика работы перечисленных механизмов с точки зрения требований, предъявляемых к их приводу.
2. НАСОСЫ
Насос любого назначения представляет собой гидравлическую машину, служащую для преобразования энергии, подводимой к нему от внешнего источника (двигателя), в энергию движения жидкости.
Согласно принятой терминологии, насосами называют машины, используемые для перекачивания однородных жидкостей (воды, масла и др.). Грунтовые насосы предназначены для перекачивания водогрунтовой смеси — пульпы.
В гидромеханизации применяются исключительно центробежные лопастные насосы. Последующее изложение относится к насосам именно этого вида.
Пересчет характеристик производится по формулам (8-4). Построение механических характеристик ω=f(M) производится приближенно по формулам (8-1) и (8-5).
Для практического расчета потерь при транспортировании гидросмеси по трубам пользуются эмпирическими формулами, экспериментальными кривыми, номограммами и таблицами.
Примерный вид кривых Q—H для труб показан на рис. 8-1 (кривые 4, 5, 6) при транспортировании воды или гидросмеси различной плотности. Там же показаны точки установившегося режима при работе системы.
Установившийся режим работы насосов.
Установившийся режим работы насоса при транспортировании жидкости определяется равенством напора, развиваемого насосом, сумме гидравлических сопротивлений, преодолеваемых напором насоса, т. е. сумме геодезического напора и потери напора в трубопроводе:
![]() (8-10)
(8-10)
где H— напор, развиваемый насосом; hг — сопротивление, обусловленное геодезической высотой подъема жидкости; Σh—потери напора в сети (суммарные потери в трубопроводе, соединениях труб, коленах, задвижках и пр.).
Для однородной жидкости потери пропорциональны квадрату скорости потока, а следовательно, квадрату подачи. Тогда
![]() (8-11)
(8-11)
где k — коэффициент пропорциональности.
Последнее выражение представляет собой уравнение H=f1(Q) трубопровода. Если кривую гидравлического сопротивления построить в координатах Q—H, то установившийся режим системы насос — сеть определится точкой пересечения кривых Q—H насоса и трубопровода.
Взаимозависимость потери напора и подачи в трубопроводах для гидросмеси (пульпопроводах) простого аналитического выражения, подобного зависимости для однородной жидкости, не имеет.
Для расчета потерь при транспортировании гидросмеси по трубам пользуются эмпирическими формулами, экспериментальными кривыми и таблицами.
Примерный вид кривых Q—H для труб при транспортировании воды и гидросмеси с различным удельным весом показан на рис. 8-1 (кривые 4, 5 и 6). Там же показаны точки установившегося режима работы насоса на сеть.
Режим работы и технические данные насосов воды
Номенклатура насосов, применяемых в гидромеханизации, очень велика; обычно они работают в номинальном режиме или близком к нему.
В зависимости от требующихся по технологии главных параметров выбирается определенный тип насоса; выбранный насос работает практически в неизменном режиме.
В гидромеханизации применяются насосы с низким, средним и высоким значениями давления и подачи.
По назначению применяемые насосы можно отнести к следующим основным группам: 1) водяные насосы отжима для грунтовых насосов; 2) насосы водоснабжения для гидромониторов; 3) откачивающие или подпиточные; 4) прочие.
- Вода отжима у грунтовых насосов служит для предотвращения проникновения жидкости, содержащей твердую фазу, в сальниковые уплотнения вала и в суженные зоны между движущимися и неподвижными частями грунтового насоса, что создает противодавление по отношению к абразивной гидросмеси. Напор, создаваемый этими насосами, должен превышать рабочее давление пульпы в корпусе грунтовых насосов. Кроме того, этими же насосами осуществляется питание эжекторов, создающий вакуум в грунтовых насосах для заполнения их водой при пуске и для откачки воды, скапливающейся в отсеках корпуса земснаряда.
Эти же насосы используются на земснарядах в качестве активных защитных противопожарных средств. Номинальная подача этих насосов, невелика.
- Для водоснабжения гидромониторов применяются насосы, относящиеся по их параметрам к категории насосов средней производительности, высокого давления.
- Откачивающие или питающие насосы предназначены для откачки воды из водоемов или для подачи воды в замкнутые водоемы. Так как насосы этой группы чаще всего работают в условиях малого перепада геодезических отметок, то применяемые для этих целей насосы относятся к категории низконапорных, высокопроизводительных.
Таблица 8-1

Примечание. Указываются значения синхронной чистоты вращения трехфазных двигателей переменного тока частотой 50 Гц.
- Группа насосов вспомогательного назначения включает различные циркуляционные насосы (например, насосы циркуляции электролита или охлаждающей воды для жидкостных регуляторов скольжения), насосы гидрорыхления и др. Насосы, относящиеся к этой группе, обычно малопроизводительны.
Технические параметры двигателей насосов определяются данными каталогов и указываются в паспорте насосов.
В табл. 8-1 приводятся основные технические данные некоторых насосов и двигателей привода к ним.
Режимы работы и технические данные грунтовых насосов.
Разнообразие производственных условий работы грунтовых насосов может быть сведено к следующим основным группам.
1. Стационарные грунтонасосные у с т а н о в к и, к которым относятся агрегаты, устанавливаемые на постоянном основании, черпающие гидромассу из специально оборудованного зумпфа, бункера или других устройств. При всасывании из зумпфа консистенция пульпы регулируется путем подъема или опускания всасывающей трубы при помощи лебедки с полиспастом.
Собственного рыхлительного устройства грунтонасосные установки не имеют: они работают в технологическом сочетании с гидромониторами или экскаваторами.
Стационарные грунтонасосные установки применяются в горнорудном производстве для гидротранспорта ископаемых, на вскрышных работах, в карьерах по добыче песка и гравия.
- Передвижные установки, отличающиеся от стационарных способом монтажа оборудования, — на санях или полозьях. Установки перемещаются с одного места на другое тракторами или лебедками. В настоящее время существуют передвижные установки большого габарита с грунтовыми насосами типа 500-60 и двигателями до2500 кВт.
Назначение передвижных установок то же, что и стационарных.
- Плавучие землесосные снаряды. Этот вид оборудования гидромеханизации объединяет в общий комплекс устройство механического рыхления, грунтозабор и транспортировку грунта в гидравлической смеси к месту его укладки. Все оборудование землесосного снаряда устанавливается в металлическом корпусе, водоизмещение которого рассчитывается на плавучесть. Такие снаряды предназначены для работы в различных водоемах.
Выемка твердого материала (грунтозабор) из забоя и образование водогрунтовой смеси обеспечиваются свободным всасыванием (рыхлые неслежавшиеся пески и гравий) или с помощью рыхлительного устройства фрезерного типа (глины и другие связные материалы), погружаемого на необходимую глубину. Существуют также эжекторный, эрлифтный, черпаковый грунтозаборные устройства и гидравлическое рыхление грунта.
Землесосные снаряды применяются для дноуглубительных работ, для выемки грунта в каналах и котлованах, добычи инертных материалов, залегающих под водой, а также для разработки песка в подводных карьерах при возведении насыпей средствами гидромеханизации.
- Перекачивающие (бустерные) грунтонасосные станции, назначение которых заключается в повышении напора в системах гидротранспорта, если давление, развиваемое головным насосом, недостаточно для передачи смеси на заданное расстояние. Перекачивающие грунтонасосные установки могут быть как стационарными, так и плавучими.
Грунтовые насосы перекачивающих станций свободного забора гидросмеси не имеют и работают под напором предыдущей ступени системы гидротранспорта.
Потеря напора в трубах обусловливается их протяженностью, величиной геодезического подъема, т. е. профилем трассы трубопровода, количеством и конфигурацией фасонных частей, концентрацией и геотехнической характеристикой твердой фазы транспортируемой гидросмеси. В зависимости от перечисленных факторов система гидротранспорта включает в себя большее или меньшее количество перекачивающих станций.
Таблица 8-2
Тип грунтового насоса | Диаметр напорной трубы, мм | Подача по воде, м/ч | Полный напор, м | К. п. д. грунтового насоса, % | Синхронная частота вращения, об/мин | Мощность электродвигателя, кВт | Масса грунтового насоса кг |
8НЗ-У | 250 | 720 | 22 | 58 | 750 | 160 | 2800 |
ЗГМ-2М | 300 | 1900 | 53 | 65 | 750 | 630 | ' 3400 |
20Р-11М | 500 | 3800 | 62 | 59 | 500 | 1250 (1600) | 10530 |
500-60М | 600 | 5600 | 70 | 68 | 500 | 2500 | 16 500 |
1000-80 | 800 | И 500 | 88 | 72 | 300 | 4400 | 26 500 |
Расстановка перекачивающих станций вдоль транспортирующего трубопровода бывает различной. Она может быть равномерной, когда бустерные грунтовые насосы ставят на концах участков равной потери напора. В других случаях перекачивающие станции работают в непосредственной близости к головной установке или землесосному снаряду.
В отличие от водяных насосов режим работы грунтовых насосов не является неизменным. Технология гидромеханизированных работ в подавляющем большинстве случаев не допускает стабильности длины и конфигурации напорного трубопровода. Так, при возведении намывных гидротехнических сооружений (плотин, дамб) уровень сброса пульпы постепенно поднимается и одновременно возрастает длина трубопровода. Кроме того, режим работы грунтового насоса изменяется в зависимости от консистенции водогрунтовой смеси. Поэтому грунтовые насосы выбираются по наиболее тяжелому из возможных режимов.
В табл. 8-2 приводятся технические данные некоторых распространенных разновидностей грунтовых насосов.
Электропривод насосов
Технология и режим работы насосов не предъявляют особых требований к двигателям привода. Поэтому в гидромеханизации для привода водяных и грунтовых насосов во всех случаях применяют асинхронные либо синхронные двигатели; последние используются при мощности привода от 500 кВт и выше.
Выбор двигателя того или другого вида производится с учетом совокупности факторов, характеризующих асинхронную и синхронную машину.
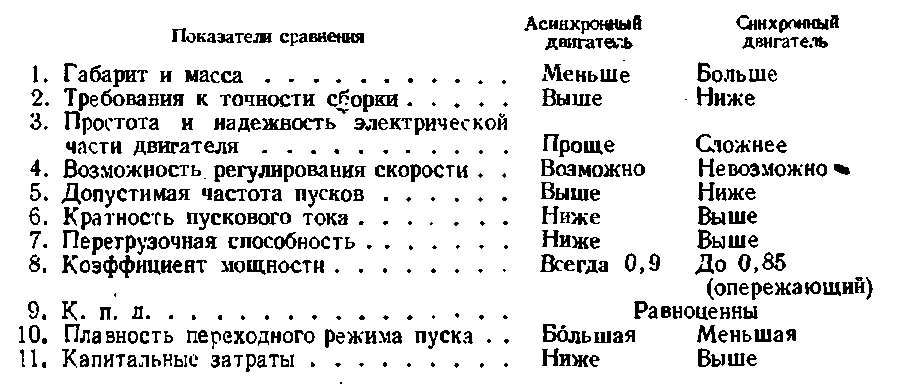
Ниже приводятся сравнительные данные для двигателей обеих разновидностей по общим технико-экономическим и технологическим показателям (в качестве объекта сравнения с синхронным двигателем принят асинхронный двигатель с фазным ротором):
На всех перечисленных разновидностях установок гидромеханизации особенности работы электропривода насосов могут быть разными вследствие различия гидравлических и механических режимов.
Для решения вопроса о целесообразности применения асинхронного или синхронного двигателя следует провести сопоставление того и другого вида по их эксплуатационным и конструктивным показателям.
- Габарит и масса двигателя имеют значение при выборе типа привода для передвижных установок. Меньшее значение этот фактор имеет для стационарных или плавучих установок.
- Немагнитный зазор (междужелезное пространство) между статором и ротором при равных мощностях и скорости у синхронных двигателей в 2—2,5 раза больше, чем у асинхронных1.
Двигатели крупных насосов имеют выносные подшипники, установленные на общей раме со статором. Такие двигатели требуют точной центровки ротора и статора, а также валов двигателя и насоса. Для передвижных установок это обстоятельство приобретает весьма важное значение, особенно если учесть неизбежную вибрацию, вызываемую явлениями кавитации и возможными нарушениями точности сборки при перемещении установки с одного места на другое. При этом следует принять во внимание, что кавитация грунтового насоса значительно резче проявляется при работе на повышенных значениях концентрации пульпы. Передвижные грунтонасосные установки, работающие с гидромониторным рыхлением, работают в условиях большего насыщения смеси частицами твердой фазы.
Таким образом, синхронный двигатель имеет преимущества перед асинхронным на передвижных грунтонасосных установках, с точки зрения механической надежности.
1 Современная асинхронная машина 16-го габарита мощностью до :1600 кВт (серия АК), применяемая для грунтовых насосов типа 20Р-11М, имеет по данным завода-изготовителя, расчетный зазор 2 мм. Зазор в синхронных машинах (серия СД) мощностью 1250 кВт составляет 4,5 мм.
- Синхронный двигатель представляет собой двухмашинный агрегат, состоящий из собственно двигателя и возбудителя — генератора постоянного тока (или тиристорного возбудительного устройства). Асинхронный двигатель по простоте устройства и обслуживания его электрической части имеет определенные преимущества перед синхронным.
Однако для выбора рода двигателя это соображение не является решающим.
- Важная особенность асинхронного двигателя — возможность регулирования скорости привода. Вопрос о необходимости регулирования скорости должен рассматриваться с учетом ряда факторов. Насосы, как указывалось выше, работают в подавляющем большинстве случаев с постоянной скоростью. Поэтому, с рассматриваемой точки зрения, асинхронный двигатель для привода водяных насосов в условиях гидромеханизации преимуществ не имеет.
Для грунтовых насосов оптимальная скорость находится в интервале между предельными значениями, определяемыми кавитацией насоса (высшая скорость) и выпадением твердых частиц (заилением) в трубопроводе (низшая скорость). Кроме того, подача грунтового насоса, пропорциональная скорости (Q = ω), должна соответствовать режущей (рыхлительной) способности фрезы или, в общем случае, производительности всасывающего устройства по грунту.
На основании изложенного в отдельных случаях при необходимости регулирования скорости грунтового насоса целесообразно применение асинхронных двигателей с диапазоном регулирования скорости ω= (0,75:1) ω.ном, т. е. при D≈1,3. Данный вывод не относится к перекачивающим (бустерный) грунтонасосным установкам, гидравлический режим которых в регулировании не нуждается.
- Частота пусков и остановок водяных и грунтовых насосов в общем случае различна; для тех и других она совпадает при гидромониторно-землесосных работах, где какое-либо нарушение одного из звеньев влечет за собой остановку всего комплекса. В прочих случаях режимы насосов воды характеризуются большей длительностью безостановочной работы, чем у грунтовых насосов. Относительно частые включения и отключения грунтовых насосов помимо технологических причин обусловлены обычно засоренностью карьера и другими непредвиденными обстоятельствами.
Асинхронный двигатель по конструктивным причинам допускает более частые пуски по сравнению с синхронным.
Слабым звеном синхронного двигателя, с точки зрения допускаемой частоты включений, является пусковая клетка, которая при асинхронном разбеге ротора работает в напряженном токовом и температурном режиме. Так, согласно инструктивным материалам заводов-изготовителей, двукратная остановка синхронного двигателя мощностью 3000 кВ-А в интервале рабочего времени до 30 мин требует часового перерыва в его работе для охлаждения и восстановления температурных деформаций пусковой (демпферной) клетки ротора. Чрезмерная частота пусков синхронного двигателя приводит к обрыву стержней пусковой клетки в результате их температурной деформации и к местному выгоранию ложа стержней в полюсных башмаках ротора.
Асинхронные двигатели свободны от указанных недостатков.
- Кратность пускового тока синхронных двигателей в 2—2,5 раза выше кратности его для асинхронных двигателей с фазным ротором. Это обстоятельство для мощных приводов насосов ограничивает применение синхронных машин в слабых сетях электроснабжения.
- С точки зрения перегрузочной способности, синхронный двигатель превосходит асинхронный. Следует указать на то, что кратковременные перегрузки привода насосов, влекущие за собой остановку двигателя, по технологическим причинам практически места не имеют.
- Важнейшее достоинство синхронного двигателя — его способность работать с высоким по сравнению с асинхронной машиной коэффициентом мощности, а при необходимости — в режиме генератора реактивной мощности.
Мощность двигателей, применяемых в гидромеханизации для привода насосов, достаточно велика, из чего следует, что потребление ими реактивной энергии, даже при относительно высоких значениях cos φ, может быть обременительным для системы энергоснабжения1.
Из опыта гидромеханизированных работ известно, что загрузка привода насосов по току при отсутствии значительных колебаний напряжения достаточно равномерна во времени. Поэтому синхронный двигатель в состоянии нести устойчивую нагрузку в качестве источника реактивной мощности, повышая тем самым пропускную способность энергосистемы и стабилизируя напряжение на зажимах ее потребителей.
1 При cos φ—0,87. например, на 1 кВт активной мощности, передаваемой на вал двигателя, расходуется V 1—0,872=0,49 квар реактивной мощности.
- К. п. д. асинхронного и синхронного, двигателей в номинальном режиме равноценны. Асинхронный двигатель с регулированием сопротивления в роторной цепи имеет пониженный к. п. д. вследствие потерь, выделяемых в роторной цепи в виде тепла. В ряде случаев эти потери окупаются другими преимуществами регулируемого привода. В конкретных случаях для сопоставления факторов и оценки целесообразности регулирования при известном понижении к. п. д. прибегают к техникоэкономическим расчетам.
- При пуске приводов насосов происходит ускорение весьма значительных масс воды или гидросмеси, содержащихся в напорном трубопроводе, из неподвижного состояния до некоторой установившейся скорости. Резкий импульс на ускорение этих масс может явиться причиной гидравлических ударов разрушающей силы.
При переходном процессе пуска синхронный двигатель практически неуправляем; для асинхронного двигателя нетрудно создать требуемый режим пуска, изменяя число резисторов и значение ступеней сопротивления в цепи ротора.
11. Экономическая эффективность применения двигателя того или другого вида определяется расчетом, учитывающим рассмотренные выше показатели. По сумме факторов, характеризующих работу электропривода крупных насосов, практически выявилось бесспорное преимущество синхронных двигателей по сравнению с асинхронными, чем и объясняется их значительно более широкое распространение в гидромеханизации.