Особенностью условий работы некоторых механизмов является возможность возникновения резких внезапных перегрузок. В таких условиях работают экскаваторы, рыхлители и папильонажные лебедки землесосных снарядов, ковшовые цепи дражных снарядов и другие механизмы. Такой режим называется работой «на упор»; он может приводить к стопорению двигателей при чрезмерном значении момента и тока, их перегреву, а также к разрушению отдельных частей машин.
Для предупреждения аварийных последствий при работе «на упор» используют систему привода, имеющего специальную механическую характеристику с ограничением значения момента, развиваемого двигателем.

Рис. 10-8. Экскаваторная характеристика электропривода.
----- — расчетная характеристика; — действительная характеристика; АВ — рабочая
часть; ВС — падающая часть характеристики.
Такой характеристикой, которая называется экскаваторной (рис. 10-8), обладают приводы, отличающиеся резким снижением скорости при некотором, заранее определенном значении момента нагрузки Мп.
Для получения экскаваторных характеристик можно использовать уже рассмотренную систему Г—Д с задержанной обратной связью, чаще называемой обратной связью с отсечкой.
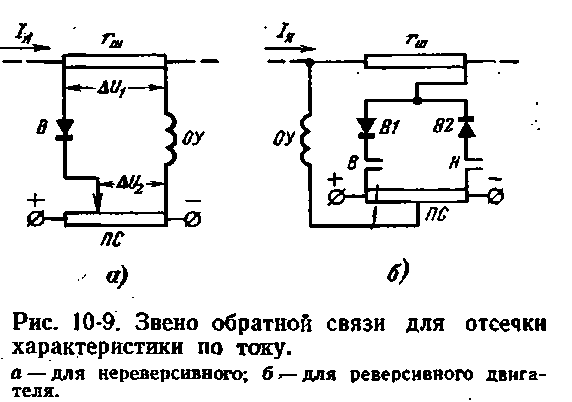
Узел токовой отсечки в цепях постоянного тока показан на рис. 10-9. Шунтовое сопротивление rш включается последовательно в главную цепь Г—Д и через него проходит ток главной цепи Iя. На шунтовом сопротивлении образуется падение напряжения ΔU1.
Через обмотку управления ОУ усилителя (одна из управляющих обмоток) ток проходит лишь тогда, когда открыт вентиль В, т. е. если![]()
иначе говоря, когда ток цепи якоря достигнет такого значения, при котором падение напряжения ∆U1—Iяrш больше напряжения ∆U2 на потенциометре сравнения ПС. Напряжение на зажимы потенциометра сравнения подается от постороннего источника.
Таким образом, обратная связь не будет непрерывно действующим звеном системы.
Сигнал обратной связи поступит на обмотки усилителя только при определенном, заранее установленном значении тока якоря. Параметры схемы управления могут быть подобраны таким образом, чтобы сигнал обратной связи, поданный на обмотку управления ОУ встречно задающему напряжению, запирал выход усилителя при определенном значении тока якоря; при этом напряжение возбуждения резко упадет и, если не снять нагрузку на валу двигателя, его обороты снизятся до нуля (ср. рис. 10-8).
Для получения экскаваторной характеристики должна быть применена, как указано, отрицательная обратная связь по току с отсечкой.
В схеме звена задержанной обратной связи для реверсивного двигателя (рис. 10-9,б) использован тот же принцип. Для реверсирования введены контакты В и Я, подключающие к потенциометру тот или другой выпрямитель, реагируя на изменение полярности напряжения в связи с переменой направления вращения двигателя. Схема управления в реверсивной системе должна быть построена таким образом, чтобы при изменении направления вращения двигателя одновременно менялась полярность как на обмотке управления, так и на задающей, т. е. чтобы сохранялся характер их взаимодействия.
Токовая отсечка для цепей постоянного тока обычно применяется при необходимости получения экскаваторной характеристики в системах электропривода Г—Д.
Токовая отсечка в цепях переменного тока выполняется в схемах с промежуточным магнитным усилителем при помощи управляемых вентилей (рис. 10-10).
Рабочий ток Iр, проходя через шунтовое сопротивление rш, обусловливает на нем некоторое падение напряжения ΔU подаваемое с однополупериодным выпрямлением на управляющий электрод тиристора Т. При достаточном значении управляющего тока, как видно из схемы, тиристор периодически (с частотой переменного тока) открывается и до обмотке управления ОУ проходит прерывистый ток одного направления при неизменном среднем значении (см. § 4-2). При снижении тока нагрузки до определенного значения тиристор остается запертым, поскольку амплитуда очередной полуволны выпрямленного тока недостаточна для его открытия.
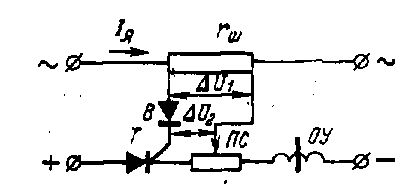
Рис. 10-10. Узел токовой отсечки для цепи переменного тока.
Так же, как и для ранее рассмотренного узла отсечки, обмотка ОУ включается таким образом, чтобы ее м. д. с. была направлена встречно по отношению к м. д. с., создаваемой задающей обмоткой. Регулирование отсечки производится также путем изменения положения скользящего контакта на потенциометре сравнения ПС.
Отсечка на переменном токе применяется в системах МУ—Д для получения экскаваторной характеристики.
Отрицательная обратная связь по току с отсечкой обеспечивает, как указано, только «перелом» характеристики, придавая ей вид экскаваторной. Однако для получения более совершенного вида экскаваторной характеристики в систему часто вводят звено поддержания скорости на рабочем участке характеристики перед точкой перелома. Без такого звена механическая характеристика привода будет слишком мягкой, что отрицательно скажется на производительности машины и качестве регулирования.
Поддержание скорости на рабочем участке, как показано выше, может быть выполнено с помощью отрицательной обратной связи по напряжению. Такая обратная связь должна функционировать, поддерживая скорость постоянной только на рабочем участке характеристики, т. е. в пределах тока от Iн=0 до точки перелома. Ее действие, таким образом, должно быть ограниченным, что так же, как и для токовых связей, обеспечивается отсечкой.
Скелет схемы управления приводом Г—Д с экскаваторной характеристикой представлен ниже.