Асинхронные двигатели различаются по: 1) исполнению ротора— короткозамкнутые и фазные; 2) исполнению обмоток статора — одно- и многоскоростные; 3) по напряжению.
Ниже рассматриваются схемы управления отдельно для каждой из перечисленных разновидностей двигателей.
Управление асинхронными двигателями с короткозамкнутым ротором напряжением до 380 В
Односкоростные нереверсивные двигатели. Рассматриваемые схемы применяются для управления простейшими нерегулируемыми приводами. Они могут быть нереверсивными и реверсивными.
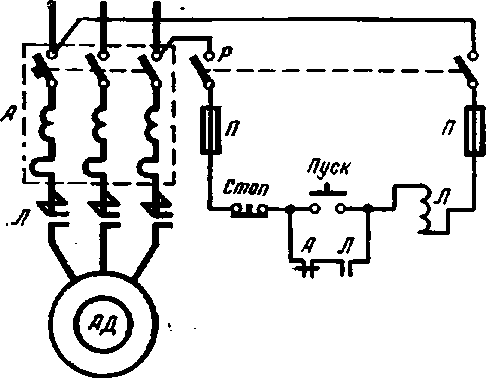
Рис. 9-9. Схема управления нереверсивным асинхронным двигателем с короткозамкнутым ротором.
Нереверсивные схемы без регулирования скорости применяются главным образом для управления приводами насосов самого различного назначения, для первичных двигателей, вращающих генераторы постоянного тока в системе Г— Д, вентиляторов, заточных станков, дробилок и пр.
Как показано на рис. 9-9, пуск двигателя осуществляется линейным контактором Л, включаемым кнопкой Пуск. Кнопка шунтируется блок-контактом Л, поэтому после прекращения нажатия кнопки и размыкания ее контактов катушка контактора остается под напряжением и якорь контактора не отпадает.
Остановка двигателя производится отключением его от сети; при нажатии на кнопку Стоп прерывается питание катушки контактора.
Защита двигателя АД осуществляется автоматом А, имеющим элементы отключения: тепловые — для защиты от перегрузки двигателя и электромагнитные — для защиты от короткого замыкания. Размыкающий блок-контакт защиты А введен в цепь, шунтирующую кнопку Пуск схемы управления.
В случае непредвиденного исчезновения напряжения якорь контактора Л отпадает и его замыкающие блок-контакты в цепи, шунтирующей кнопку, размыкаются, предотвращая самозапуск двигателя при восстановлении исчезнувшего напряжения (нулевая защита).
Односкоростные реверсивные двигатели применяются, например, в приводе лебедок, не требующих регулирования скорости (см. § 8-2, 8-4, 8-5).
Реверсирование двигателя АД, как показано на рис. 9-10, производится изменением чередования фаз на статоре двигателя контакторами реверса Я и В. Для включения этих контакторов служат кнопки Вперед и Назад, каждая из которых имеет две пары контактов. При нажатии той или другой кнопки одна пара контактов замыкает цепь соответствующей катушки контактора В или Н, а вторая одновременно разрывает цепь катушки другого контактора. Таким способом кроме включения двигателя достигается блокировка, предотвращающая короткое замыкание главной цепи, которое возникло бы при случайном одновременном нажатии на обе кнопки реверсирования.
Контакторы реверса помимо электрической имеют также и механическую блокировку, которая допускает притяжение якоря лишь в том случае, если отпал якорь второго контактора. Это необходимо на тот случай, когда при отключении контактора его якорь не отпадает вследствие приваривания контактов.

Рис. 9-10. Схема управления реверсивным асинхронным двигателем с короткозамкнутым ротором.
Одновременно с включением двигателя подается напряжение на катушки тормозного электромагнита Г, освобождающего зажатые колодки тормозного устройства.
Иногда в схему вводят отдельный контактор, включающий тормозной электромагнит. Защита главных и оперативных цепей осуществляется теми же средствами, что и в предыдущей схеме.
Электротехническая промышленность выпускает комплектные блоки аппаратов управления нереверсивными двигателями, собранные в готовую схему на напряжение 380 и 220 В (станции управления серии БУ).
Многоскоростные двигатели.
В практике широко распространены асинхронные двигатели со ступенчатым регулированием скорости путем изменения числа пар полюсов обмотки статора (см. § 5-5).
Многоскоростные двигатели со ступенчатым регулированием скорости применяются в приводах тяговых лебедок на землесосных снарядах, в частности на папильонажных. Такие механизмы должны иметь двустороннее вращение. В связи с этим ниже рассмотрены только схемы реверсируемого привода.
На рис. 9-11 показан двухскоростной двигатель с одной обмоткой, имеющей выводы от средних точек каждой фазы. На ступени низшей скорости обмотки трех фаз соединены в треугольник, на высшей— три спаренные параллельно секции полуобмоток соединяются в звезду (рис. 5-35).
Соединение треугольником обеспечивается включением контактора 1-й скорости 1C. Работа на 2-й скорости осуществляется в результате включения контакторов 2С1, 2С2. Последние работают совместно, потому что замыкание цепи катушки 2С2 выполняется замыкающим блок- контактом 2С1. Одновременное включение контактора 1C с контакторами 2С1 и 2С2 предотвращается электрической блокировкой, осуществляемой размыкающими блок-контактами, установленными в цепи другого контактора, а также вторыми размыкающими контактами кнопок.
Реверсирование двигателя производится в том же порядке, как и в предыдущей схеме.
Защита двигателя, аппаратов и проводов от короткого замыкания осуществляется предохранителями 1П и 217; для защиты от длительных перегрузок служат тепловые реле 1РТ, 2РТ, 3РТ, 4РТ, размыкающие контакты которых введены в цепь управления.
Схема управления четырехскоростным двигателем показана на рис. 9-12. Четырехскоростные асинхронные двигатели имеют
на статоре две самостоятельные секционированные обмотки. Соответствующими переключениями каждой из обмоток достигается изменение числа пар полюсов, как это показано в схеме управления двухскоростным двигателем (рис. 9-11).
Блокировка контакторов скоростей, исключающая их одновременное срабатывание при ошибочном нажатии нескольких кнопок одновременно, осуществляется размыкающими контактами кнопок и размыкающими блок-контактами контакторов.
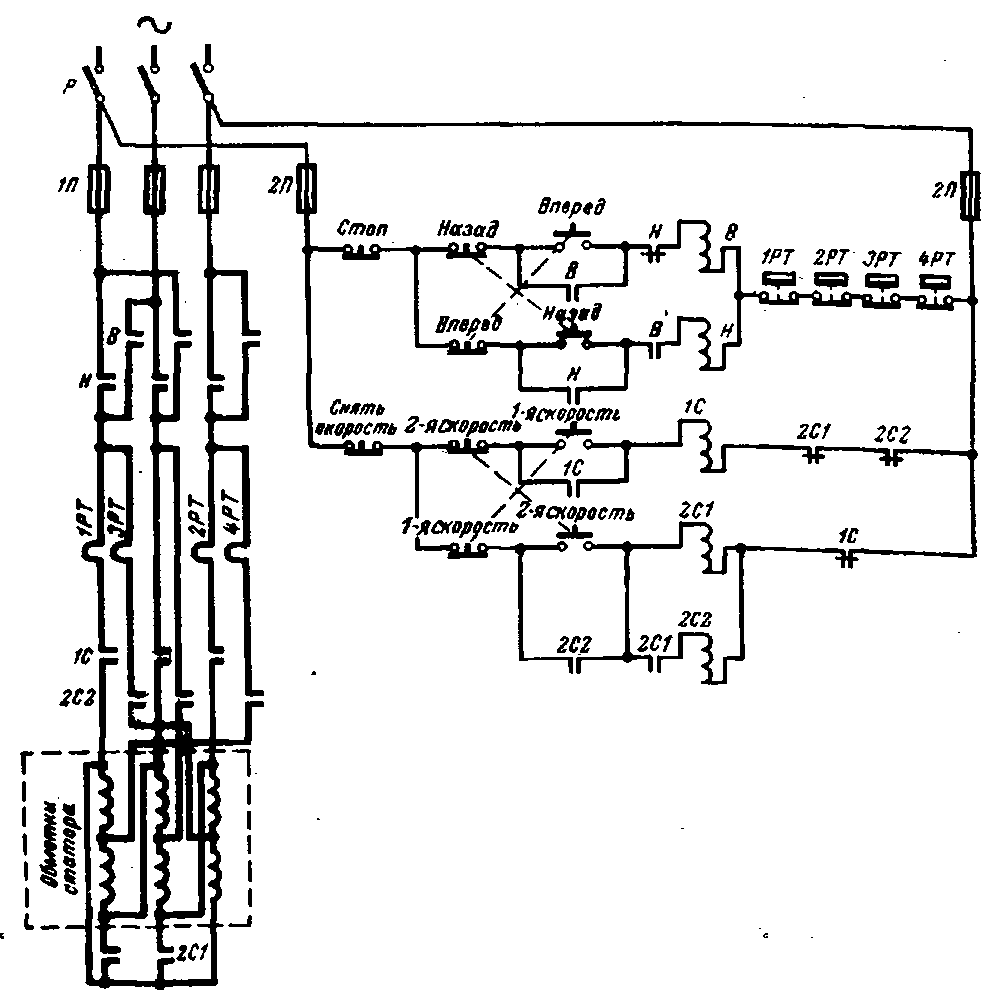
Рис. 9-11. Схема управления двухскоростным реверсивным асинхронным двигателем

Рис. 9-12. Схема управления реверсивным четырехскоростным асинхронным двигателем.
Принцип реверсирования и защита аналогичны рассмотренным в схеме, приведенной на рис. 9-11.
Схемы управления пуском асинхронных двигателей напряжением до 6000 В с фазным ротором
Асинхронные двигатели с фазным ротором применяются в тех случаях, когда необходимо ограничить токи при переходном процессе пуска, для получения повышенных значений момента при пуске, для регулирования скорости привода и для обеспечения необходимых механических характеристик при торможении.
Выполнение перечисленных требований обеспечивается плавным или ступенчатым изменением сопротивления цепи ротора.
Схема реостатного пуска асинхронного двигателя (рис. 9-13) применяется для приводов, работающих с постоянной скоростью: насосов
(в том числе грунтовых) средней мощности, рыхлительных устройств землесосных снарядов и др.
Переключающее устройство реостата изображено в виде развертки поворотного барабана с контактными сегментами, являющейся одновременно диаграммой замыкания сопротивлений.
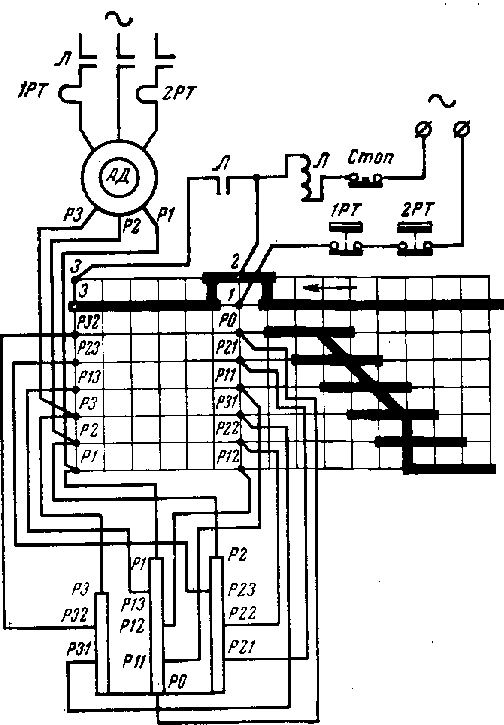
Рис. 9-13. Схема реостатного пуска асинхронного двигателя.
Последовательно с каждой фазой обмотки ротора включена фаза реостата, состоящая из нескольких соответственно подобранных ступеней сопротивления. Сопротивления фаз реостата соединены в звезду в точке РО. Каждая ступень сопротивления присоединена к соответствующему контакту реостата (Р11, Р12, ...; Р21, Р22, ... ..Р31, Р32, ...). При повороте барабана расположенные на нем сегменты шунтируют отдельные· ступени сопротивлений.
Показанное на рисунке нулевое положение барабана соответствует отключенному двигателю. При повороте барабана на одно деление в направлении, показанном стрелкой, контактами 1 и 2 замыкается цепь катушки контактора Л; при этом закрываются его главные контакты в цепи статора и двигатель начинает разворачиваться при полном сопротивлении цепи ротора. Одновременно замыкаются блок-контакты Л, сохраняя цепь катушки контактора во всех последующих положениях барабана. В следующем положении шунтируется одна секция сопротивления реостата Ρ0-Ρ21, далее шунтируется секция Р0-Р11, затем Р0-Р31 и т. д. В последнем, 12-м положении барабана сопротивления реостата выведены полностью и ротор замкнут накоротко на контактах PI, Р2, РЗ.
Из схемы видно, что сопротивления выводятся несимметрично во всех фазах, вследствие чего число ступеней пуска относительно велико и режим пуска оказывается достаточно плавным.
В случае непредусмотренного снятия напряжения или отключения контактора кнопкой Стоп повторный пуск может быть осуществлен только из нулевого положения реостата.
Сопротивления, подвижные на вращающемся барабане (сегменты), и неподвижные коммутирующие контакты помещены в общем баке, наполненном трансформаторным маслом.
Для поворота барабана служит рукоятка или штурвал, расположенный на крышке реостата (рис. 2-10).
Остановка двигателя может быть осуществлена возвратом барабана реостата в исходное (нулевое) положение или, как в рассматриваемой схеме, воздействием на кнопку Стоп.
Схемы реостатного пуска, подобные рассмотренной, применяются для двигателей, работающих на напряжениях ниже 1000 В (127, 220, 380) и выше 1000 В (6000 В).
Реостаты данной конструкции предназначены для кратковременного включения при пуске, и их нельзя применять для регулирования скорости.

Рис. 9-14. Схема управления пуском асинхронного двигателя с магнитной станцией.
Пуск с индукционным реостатом осуществляется с помощью трехфазных индуктивных катушек на магнитопроводе, включаемых в цепь ротора в соответствии с изложенным в § 2-5 (см. рис. 2-11).
Индукционные реостаты применяются для двигателей с рабочим напряжением до 6000 В1.
Недостатком систем управления пуском с индукционным реостатом является пониженный в сравнении с активным сопротивлением пусковой момент.
Магнитная станция управления пуском асинхронного двигателя исключает необходимость последовательных переключений в цепи ротора ручным способом.
Шунтирование ступеней сопротивления выполняется автоматически.
Рассмотрим схему управления пуском асинхронного двигателя напряжением 6000 В с магнитной станцией, представленной на рис. 9-14. На левой стороне рисунка в однолинейном изображении показаны главные (силовые) цепи двигателя; справа — схема магнитной станции.
В схеме главных цепей используется разъединитель Р, предназначенный для отделения масляного выключателя Л2, двигателя и элементов, расположенных ниже выключателя по отношению к шинам напряжением 6000 В.
Трансформаторы тока 1TT и 2ТТ служат для подключения катушек реле защиты и приборов измерения (на схеме не показаны1).
В цепь ротора введены секционированные сопротивления и главные контакты контакторов ускорения 1У, 2У, 3У для трехступенчатого пуска двигателя. Пуск и остановка двигателя производятся выключением или включением масляного выключателя Л.
На магнитной станции установлены: автомат А для включения в защиты цепей управления, три реле ускорения 1РУ, 2РУ, 3РУ с выдержкой времени, контакторы ускорения 1У, 2У, 3У и реле режима пуска РРП, катушка которого включена последовательно с размыкающим блок-контактом привода выключателя Л.
Реле времени 1РУ, 2РУ и 3РУ рассчитаны на работу при постоянном токе; их катушки подключены к источнику переменного тока через выпрямитель В.
Приведение в готовность магнитной станции осуществляется при включении автомата А Тогда при разомкнутом выключателе Л катушка РРП получает питание через размыкающие блок-контакты Л, 1РУ> 2РУ и 3РУ. При этом якори реле 1РУ, 2РУ и 3РУ притянуты, обеспечивая своими размыкающими контактами разрыв цепей катушек контакторов 1У, 2У, 3У.
При включении двигателя масляным выключателем Л катушка РРП теряет питание, вследствие разрыва размыкающих блок-контактов Л, после чего последовательно, с выдержкой времени отпадают реле 1РУ, 2РУ и 3РУ.
В той же последовательности размыкающими блок-контактами этих реле замкнутся цепи катушек контакторов 1У, 2У и 3У, главные контакты которых шунтируют ступени пускового сопротивления в цепи ротора двигателя.
1 Индукционные реостаты не применяются для регулирования скорости двигателей.
2 Для простоты рассуждения предполагается, что выключатель оборудован ручным приводом; схемы с дистанционным приводом см. ниже.
1 Устройства защиты асинхронного и синхронного двигателей аналогичны (см. рис. 9-16).
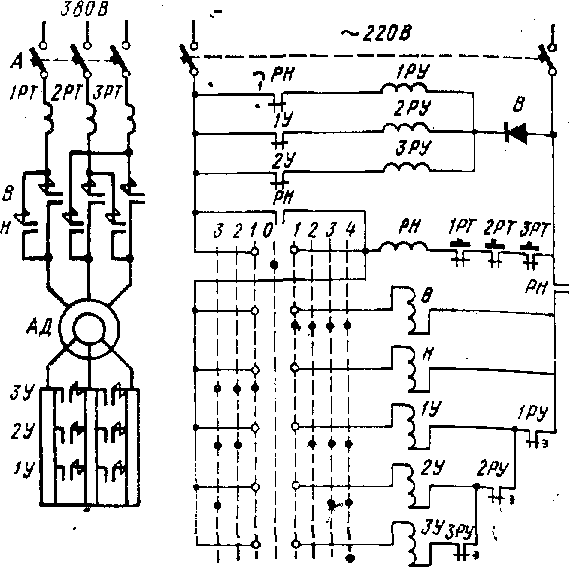
Рис. 9-15. Схема управления асинхронным двигателем с реверсированием и регулированием скорости.
Для определения выдержки времени при замыкании отдельных ступеней сопротивления, т. е. уставок реле времени 1РУ, 2РУ и 3РУ, необходимо знать длительность разбега двигателя на всех ступенях пуска. Расчет переходного процесса пуска может быть выполнен графоаналитическим методом, изложенным в § 6-5.
При четкой наладке рассмотренной системы управления можно в известных пределах ограничить величину динамического момента и толчок тока при пуске, а также обеспечить оптимальное время разгона двигателя.
Управление асинхронным двигателем с регулированием скорости
Магнитные станции для управления двигателями с регулированием скорости подобны рассмотренной выше.
Для изменения скорости в схеме рис. 9-15 применен универсальный переключатель или контроллер, с восемью фиксированными положениями рукоятки, последовательно замыкающий цепи реверса В и Н и ускорения 1У, 2У и 3У.
Схема предусматривает изменение направления вращения двигателя и работу на четырех ступенях скорости при прямом вращении, на трех ступенях — при реверсировании.
Нулевое положение переключателя обеспечивает блокировку схемы, работа которой возможна только при включении реле контроля напряжения PH. В случае непредвиденного снятия напряжения или срабатывания реле защиты максимального тока 1РТ, 2РТ или 3РТ, независимо от того, в каком бы положении ни находилась при этом рукоятка переключателя, возобновление работы привода возможно лишь после установки переключателя в нулевое положение.
Реле времени 1РУ, 2РУ и 3РУ введены в схему для контроля за переходным процессом при разбеге двигателя. Ошибочная резкая перестановка рукоятки переключателя с одного положения скорости на другое, без задержки на промежуточной ступени (например, с 1-го на 3-е или 4-е положение) не форсирует процесс нарастания момента (тока) и скорости. Контакторы ускорения 1У, 2У и 3У включатся лишь по истечении выдержки времени, т. е. после того как реле 1РУ, 2РУ и 3РУ отработают время, заданное их уставками.
Регулирование скорости с применением жидкостных регуляторов скольжения (ЖРС) используется сравнительно редко. Кроме того, применение ЖРС требует специальных устройств для охлаждения электролита, обычно выполняемых в виде циркуляционных установок.
Преимуществом систем с использованием ЖРС является возможность плавного, бесступенчатого регулирования скорости.