- Эффекты затемнения
В определенных типах субоптимальных разработок FLIR на изображение на экране индикатора накладывается медленно изменяющийся большой по площади паразитный сигнал. Этот дефект изображения называется затемнением по аналогии с похожим, но не связанным с ним по существу эффектом в передающих телевизионных трубках. Затемнение возникает, когда наблюдается одно из следующих двух явлений (или оба сразу). Во-первых, если сигнал приемника излучения от однородного источника изменяется в картине в зависимости от угла сканирования, изображение источника на экране индикатора будет казаться изменяющимся по яркости или затемняться. Во-вторых, если меняется сигнал приемника излучения от источников, находящихся вне поля зрения, т. е. сигнал от фона, система FLIR пропустит эти изменения по переменной составляющей в видеоканал, в результате чего возникнет не зависящий от картины эффект затемнения.
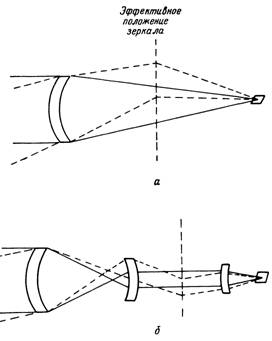
Фиг. 7.35. Сдвиг пучка при сканировании. а — сканирование в сходящемся пучке; б — сканирование в параллельном пучке.
Имеются два типа затемнения: зависящее и не зависящее от сигнала. Зависящее от сигнала затемнение возникает по следующим причинам. Во-первых, из-за дисторсии в оптической системе, которая приводит к изменению увеличения в зависимости от угла поля зрения. В результате будет наблюдаться локальное увеличение или уменьшение яркости деталей изображения в фокальной плоскости. Поскольку системы FLIR работают по переменной составляющей сигнала, изменения яркости фона из-за дисторсии будут еще более заметными. Во-вторых, виньетирование в оптической системе вызывает спад сигнала в соответствии с кривой виньетирования. Эти два дефекта часто удается устранить соответствующим выбором оптической системы при проектировании. В-третьих, затемнение равномерно излучающего объекта возникает из-за изменения по закону косинуса проекции площади зрачка оптической системы на плоскость, перпендикулярную оси мгновенного угла поля зрения. В-четвертых, зависящее от сигнала затемнение связано с изменением угла, под которым сходящийся пучок падает на приемник излучения. Эта причина может создать наиболее серьезные проблемы. В первом приближении плоская поверхность чувствительных элементов приемника воспринимает излучение по закону Ламберта, т. е. выходной сигнал пропорционален косинусу угла между падающим пучком и нормалью к поверхности чувствительного элемента приемника. Все системы со сканированием в сходящемся пучке и системы со сканированием в параллельном пучке, в которых перемещается зрачок, характеризуются изменением угла падения пучка на приемник (фиг. 7.35). Эти изменения угла падения сходящегося пучка вызывают сигнал затемнения, изменяющийся по закону косинуса. В некоторых приемниках увеличение потерь на отражение с ростом угла падения может усугубить этот эффект.
Не зависящее от сигнала затемнение может наблюдаться во всех тех случаях, когда конфигурация сканирующей системы и оптики такова, что излучение корпуса попадает на приемник. Этим недостатком будут обладать все системы сканирования в сходящемся пучке и системы сканирования в параллельном пучке с перемещающимся зрачком. Простой частный случай показан на фиг. 7.36, где для ясности система сканирования в сходящемся пучке изображена в виде эквивалентной качающейся линзы.

Фиг. 7.36. Пример сканирования апертурой.
В любом мгновенном положении сканирующей системы приемник воспринимает излучение в пределах полного телесного угла Q1? образованного лучами, идущими от линзы. Однако, чтобы правильно работать при всех положениях оптической системы, неподвижный приемник должен воспринимать излучение в телесном угле Q2 > Таким образом, приемник принимает излучение не только от картины, но и от корпуса прибора. На корпус приемник не сфокусирован, однако поток излучения от корпуса, попадающий на приемник, может меняться в зависимости от положения сканирующей системы, так что в видеосигнал вносятся стационарные сигналы помех.
В случае сканирующей системы с перемещающимся зрачком линза приемника должна иметь запас по размеру, в связи с чем при изменении угла сканирования приемник будет визировать различные части корпуса, что при наличии разности их температур вызовет затемнение. Важно отметить, что устройство, сканирующее в параллельном пучке только в одном направлении, неизбежно будет иметь сдвиг пучка в направлении, в котором сканирование не происходит. Само по себе такое затемнение не вызывает больших неприятностей, если оно ограничено несколькими процентами от максимальной яркости изображения картины на индикаторе. Однако, если система FLIR должна использоваться как входное устройство автоматической системы слежения или в приборе, обеспечивающем автоматическую классификацию наблюдаемых объектов, затемнение должно быть сведено к минимуму. Если проектированием оптической системы затемнение устранить не удается, можно прибегнуть к диафрагмированию и установке бленд в оптической части прибора и к электронной компенсации.
ЛИТЕРАТУРА
- Levi L., Applied Optics, Wiley, 1968,
- Gorog I., Knox J. D., Goedertier P. V., A Television-Rate Laser Scanner.
1. General Consideration, RCA Rev., 33, 623—666 (1972).
- Lindberg P. J., A Prism Line-Scanner for High Speed Thermography, Optica
Acta, 15, 305-316 (1966).
- Куликовская H. И., Гальперин Л. А., Курышева В. М., Оптические характеристики сканирующих систем тепловизоров, Оптико-механическая промышленность, 37, № 10, 21 — 23 (1970).
- Jenkins F. A., White Н. Е. Fundamentals of Optics, McGraw-Hill, 1957.
- Smith W. J., Modern Optical Engineering, McGraw-Hill, 1966.
- Waddell J. H., Rotating Prism Design for Continuous Image Compensation
Cameras, Applied Optics, 5, 1211 —1223 (1966).
- Rosell F. A., Prism Scanner, JOSA, 50, 521—526 (June 1960).
- Wolfe W. L., ed., Handbook of Military Infrared Technology, USGPO, 1965.