Глава 5 Обобщенные критерии
5.1. Введение
В предыдущих главах были рассмотрены такие фундаментальные характеристики и параметры систем, как оптическая передаточная функция, отношение сигнала к шуму в изображении, частота кадров и увеличение. Каждый из перечисленных параметров лишь частично характеризует возможности системы применительно к решению практических задач. Эти параметры полезны при проектировании систем, однако требуются обобщенные критерии, учитывающие ряд параметров, чтобы оценивать их сравнительную важность при инженерном решении конкретной задачи. Необходимо, чтобы в идеальном случае такой обобщенный критерий учитывал предельные возможности наблюдателя, чтобы его можно было рассчитать по основным параметрам системы и легко измерить и чтобы, наконец, он описывал поведение системы применительно к ее назначению и использованию. В этой главе мы рассмотрим некоторые обычно применяемые обобщенные критерии и попытаемся оценить особенности их использования и типичные ошибки, которые могут при этом возникнуть.
- Эквивалентная шуму разность температур
Давно введенной и наиболее широко применяемой (часто неправильно) характеристикой способности системы различать слабые сигналы на фоне шумов является эквивалентная шуму разность температур. Эту величину обозначают по-разному. Мы будем обозначать ее АГпор 1. Аналогично существуют различные определения этой величины.
х) В тексте оригинала принято сокращение NETD — по первым буквам названия noise-equivalent temperature difference. Это сокращение аналогично по построению английскому сокращению для порогового потока — NEP (noise equivalent power). Поскольку для порогового потока общепринятым обозначением в отечественной литературе является Рпор, то и для NETD логично принять обозначение Апор-— Прим. перев.

Фиг. 5.1. Тест-объект для определения Апор (я) и вид результирующего напряжения сигнала (б).
7 — объект с равномерной кажущейся температурой Тт > Тв% К; 2 — фон с равномерной кажущейся температурой Тв, К; з — уровень шума; 4 — спад постоянного уровня.
Наиболее простое и часто используемое определение следующее: величина ΔTпор представляет разность температур объекта и фона, излучающих как черные тела в стандартном тест-объекте, при которой отношение пикового значения сигнала к среднеквадратичной величине шума на выходе стандартного эталонного электронного фильтра системы, рассматривающей тест-объект, равно единице.
Таким образом подразумевается, что необходимо найти величину А Г, обеспечивающую С/Ш = 1 на выходе эталонного фильтра в нормальных условиях, при работающей системе сканирования. Тест-объект, используемый при определении АГпор, показан на фиг. 5.1, где размер W в несколько раз превышает угловой размер приемника излучения, чтобы обеспечить получение полной реакции приемника на сигнал. Для стандартизации условий и целей сравнения желательно использовать при измерениях внешний фильтр, так чтобы МПФ всей электроники, включая внешний
(5.1)

(5.2)
и xd — время элемента разложения на приемнике излучения. Для целей анализа МПФ всех компонентов электронной системы приписываются этому фильтру.
Среднеквадратичное напряжение шума Vn определяется с помощью вольтметра, измеряющего среднеквадратичное значение напряжения в течение активного времени сканирования. Напряжение сигнала Г5 обычно определяется по импульсу от тест-объекта на экране осциллографа (фиг. 5.1). Для получения падежных результатов разность ΔT = Тт — Тв для объекта должна быть по крайней мере в несколько раз больше, чем ожидаемая величина A7\J0P, чтобы обеспечить выполнение условия Vs Vn. Величина ΔTпор вычисляется при этом по формуле
![]()
(5.3)
- Вывод выражения для пороговой разности температур ΔTпор
Вайе [II, Хоукинс [21, Хадсон [3] и Соболева [4] приводят вывод формул для определения ΔTдор, используя те исходные параметры, которые каждый из указанных авторов считает наиболее целесообразными. Ниже приводится простой вывод, который, по мнению автора данной книги, является наиболее полезным для практики. Чаще всего формулу для ΔTпор выводят для случая, когда электронный тракт обработки сигнала приемника излучения имеет плоскую частотную характеристику в пределах полосы частот системы и все ограничения по электрической полосе определяются внешним измерительным фильтром. Это позволяет связать напряжения сигнала и шума на выходе видеогракта непосредственно с характеристиками приемника излучения. Результирующее выражение легко видоизменить для более сложных случаев, вводя понятие об эквивалентной шумовой полосе.
Предлагаемый вывод основан на следующих предположениях:
- чувствительность приемника излучения одинакова в пределах площади его прямоугольного чувствительного элемента;
- обнаружительная способность приемника D* не зависит от других параметров, входящих в выражение для ΔTиор 1;
*Это предположение упрощает сравнительный анализ выражзния для ΔTпор- Если приемник излучения работает в режиме ограничения флуктуациями числа фотонов фона (режим ОФ), то это допущение может нарушаться, и тогда следует использовать формулы, приведенные и разд. 5.4.
- потери при прохождении излучения через атмосферу между объектом и приемным устройством пренебрежимо малы;
- объект и фон излучают как черные тела;
- угловой размер чувствительного элемента приемника излучения, угловой размер объекта и угол, соответствующий относительному отверстию собирающей оптики, могут полагаться малыми;
- электронная обработка сигнала не вносит дополнительных шумов.
В формулу для ΔTпор входят следующие параметры: а, Ъ — размеры чувствительного элемента приемника излучения, см; а, Р — угловые размеры чувствительного элемента приемника излучения, рад; Тв — температура фона, К; D* (X)— удельная обнаружительная способность в зависимости от длины волны, определенная при электрической частоте, при которой спектр напряжения шума приемника приведен к единице (фиг. 5.2), см -ГцВт; g (/) — нормализованный спектр напряжения шума приемника излучения (безразмерная величина); А0 — эффективная площадь входного зрачка инфракрасной оптической системы с учетом экранирования; см2; т0 (А,) — коэффициент пропускания оптической системы в зависимости от длины волны X (безразмерная величина); / — эффективное фокусное расстояние оптики, см; AfR — эквивалентная шумовая полоса стандартного фильтра, используемого при определении АГпор, при спектре шума источника g (/), Гц:
![]() (5.4)
(5.4)
Рассмотрим схему сканирования системой FLIR тест-объекта (фиг. 5.3). Объект предполагается диффузным черным излучателем, подчиняющимся закону Ламберта. Объект имеет спектральную плотность потока излучения И7, Вт/(см2-мкм), и спектральную яркость
![]() (5.5)
(5.5)
Входной зрачок оптической системы стягивает телесный угол A0IR2 (расстояние R измеряется от объекта), так что спектральная облученность на входном зрачке равна WAolnR2 Вт/(см2-мкм). В некоторый момент времени в процессе сканирования приемник воспринимает излучение от площади объекта ар/?2, так что спектральный поток, трансформированный в результате пропускания излучения оптической системой с коэффициентом пропускания То (X), равен

Фиг. 5.2. Нормализация спектра напряжения шума.
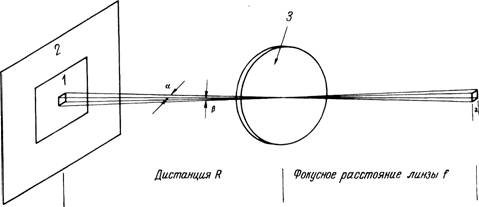
Фиг. 5.3. К выводу выражения для Д77пор.
I — объект; 2 — фон; 3 — оптическая система с эффективной площадью входного зрачка Л о.
- Недостатки ΔTпор как обобщенного критерия
Пороговая разность температур ΔTпор как обобщенный критерий имеет ряд недостатков:
- В видеоканале часто возникают нестационарные процессы, которые не видны на индикаторном устройстве, а на шкале вольтметра, измеряющего среднеквадратичное напряжение шума, приводят к завышенным отсчетам, если только эти процессы не подавляются и в вольтметре.
- Уровень пикового напряжения сигнала Vs требует пояснения и определяется с известной долей произвола (фиг. 5.1).
- Пороговая разность температур ΔTпор, измеренная на выходе электронной системы, не всегда показательна для всей системы в целом, потому что между точкой измерения ΔTпор и конечным изображением имеются свои пространственные фильтры и источники шумов.
- ΔTпор учитывает полный шум в полосе, а глаз по-разному воспринимает шумы различных типов и частоты.
- Проектирование системы в расчете на минимум измеренного значения ΔTпор без рассмотрения других факторов, влияющих на качество изображения, может привести к совершенно неудовлетворительным результатам. Например, часто оказывается возможным улучшить ΔTпор, измеренное в лабораторных условиях, за счет расширения спектрального диапазона, а в результате характеристики системы в реальных условиях могут резко ухудшиться. Одна из возможных причин ухудшения ΔTпор заключается в том, что при расширении спектрального диапазона система становится чувствительной к солнечным бликам. Если фотоприемник работает в режиме ОФ, может также оказаться, что высокое отношение сигнала к шуму, полученное в лабораторных условиях, резко уменьшится в реальных условиях из-за ослабления сигнала атмосферой и будут восприниматься одни шумы фона.
- Величина ΔTпор не учитывает влияния на отношение сигнала к шуму различий в излучательной способности.
- Величина ΔTпор практически бесполезна при сравнении систем, работающих в разных спектральных диапазонах, с различными характеристиками пропускания излучения атмосферой.
Кроме того, критерий ΔTпор не учитывает следующих факторов:
- Зрительный аппарат работает как фильтр нижних частот, отрезающий шумы на высоких пространственных частотах.
- Зрительный аппарат состоит из множества узкополосных фильтров, работающих независимо. Таким образом, объект