
Рис. 3-14. Механические характеристики асинхронного электродвигателя при регулировании скорости изменением сопротивления в роторной цепи.
Существует два наиболее распространенных способа регулирования скорости асинхронных электродвигателей: изменением сопротивления в цепи ротора; изменением числа пар полюсов. В практике находят применение также и другие способы регулирования скорости асинхронных электродвигателей, например изменением частоты питающей сети, изменением индуктивности цепи статора (дроссельное регулирование), импульсный метод. Однако эти способы имеют ограниченные области применения, что объясняется, главным образом, факторами экономического характера.
Регулирование скорости изменением сопротивления в цепи ротора применяется для электродвигателей с фазным ротором. При введении дополнительного сопротивления в цепь ротора величина скольжения возрастает, а скорость при заданном нагрузочном моменте будет соответственно снижаться, что приведет к изменению наклона механической характеристики (рис. 3-14). Регулирование скорости происходит при постоянном моменте и переменной мощности на валу электродвигателя. Поэтому такое регулирование целесообразно применять для механизмов, работающих при Mс=const (крановые механизмы, механизмы передвижения торфяных машин). Регулирование скорости неэкономично, так как сопровождается большими потерями. Потери мощности при регулировании можно приближенно оценить из уравнения
![]()
где Р1 — подводимая к электродвигателю мощность.
Из выражения следует, что при снижении скорости «вниз» на 50% (s=0,5) половина подводимой к электродвигателю мощности превращается в потери. Поэтому диапазон регулирования будет небольшим, т. е. не будет превышать величины порядка 1:2.
Введение добавочного сопротивления в цепь ротора при данном регулировании скорости приводит к неустойчивой работе привода на малых скоростях, так как увеличение крутизны механической характеристики создает колебания скорости при небольших изменениях момента сопротивления нагрузки. Этот фактор также ограничивает диапазон регулирования скорости вращения.
Регулирование скорости изменением числа пар полюсов находит широкое применение в электроприводах с асинхронными короткозамкнутыми электродвигателями. Промышленность выпускает их двухскоростными, трехскоростными и четырехскоростными.
Изменение числа пар полюсов наиболее просто достигается при устройстве двух независимых обмоток на статоре — двухскоростные электродвигатели. В практике широко применяют переключение одной статорной обмотки, при котором соотношение числа пар полюсов равняется двум. Например, для отечественных двухскоростных электродвигателей новой серии АО2 существуют следующие соотношения скоростей (синхронных): 3000/1500; 1500/750, 1000/500.
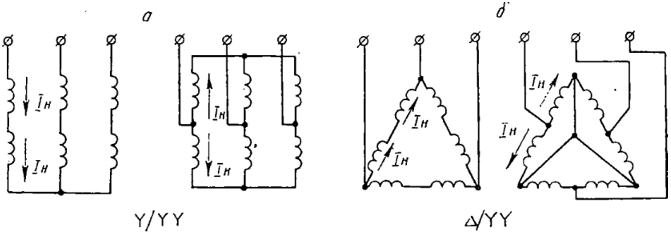
Рис. 3-15. Схемы переключения обмоток статора двухскоростных асинхронных электродвигателей.
У трехскоростного электродвигателя одна обмотка предназначается на две скорости с соотношением 1:2, вторая — на одну скорость; например, для той же серии АО2 имеются следующие скорости: 3000/1500/1000, 1500/750/1000. У четырехскоростного электродвигателя каждая обмотка обеспечивает получение двух скоростей с тем же соотношением 1:2: 500/750/1000/1500.
Приведенные на рис. 3-15 схемы переключения числа пар полюсов применяются в многоскоростных асинхронных электродвигателях отечественного производства. На рис. 3-15, а изображена схема звезда — двойная звезда. Здесь при большем числе полюсов обе части фазной обмотки соединены последовательно, а три фазные обмотки соединены в звезду. При вдвое меньшем числе полюсов половины фазных обмоток соединяются в две параллельно включенные звезды.
На рис. 3-15, б приведена схема треугольник — двойная звезда. Здесь при большем числе полюсов обе части фазной обмотки включены последовательно, а фазные обмотки соединяются треугольником. При вдвое меньшем числе полюсов питающие провода подводятся к серединам сторон треугольника, а его углы соединяются в одной точке. Таким образом получается схема двойной звезды.
В схеме 3-15, а при переключении числа пар полюсов осуществляется регулирование скорости при постоянном моменте. Поэтому такие схемы целесообразно применять в приводах, где в процессе регулирования статический момент остается неизменным (подъемно-транспортные механизмы). Схема 3-15, б иллюстрирует регулирование скорости, которое целесообразно осуществлять при постоянной мощности (многие типы металлорежущих станков).
Регулирование скорости переключением числа пар полюсов дает ступенчатое регулирование. Оно является простым и экономичным; механические характеристики при всех скоростях остаются жесткими. Диапазон регулирования 1:6 (8).
Применение электродвигателей с переключением полюсов целесообразно там, где не требуется плавного регулирования скорости. Широкое использование многоскоростных электродвигателей в металлорежущих станках значительно уменьшило количество механических передач. Этот способ регулирования применяется и в электроприводах торфяных машин.

Рис. 3-16. Схема регулирования скорости асинхронных электродвигателей изменением частоты питающей сети:
РД — рабочие электродвигатели: СГ — синхронный генератор (преобразователь частоты); ДП — электродвигатель постоянного тока; ГП — генератор постоянного тока; АД — асинхронный электродвигатель.
Регулирование скорости асинхронных электродвигателей изменением частоты питающей сети требует специального источника переменного тока с изменяемой частотой. В настоящее время для этой цели наиболее широко используются электромашинные преобразователи. Одна из возможных схем такого преобразователя приведена на рис. 3-16. Система состоит из асинхронного или синхронного электродвигателя, включаемого в сеть промышленной частоты, синхронного генератора и группы асинхронных электродвигателей с частотным регулированием. Регулирование скорости синхронного генератора осуществляется с помощью системы генератор—двигатель.
Приведенное преобразовательное устройство чрезвычайно громоздко, имеет относительно низкий к. п. д. и требует больших капитальных затрат (общая установленная мощность машин в 5 раз превышает суммарную мощность рабочих электродвигателей). Установка такого типа экономически целесообразна только в отдельных случаях (судовые установки, приводы рольгангов в металлургической промышленности).
Поэтому частотное регулирование асинхронных электродвигателей не нашло пока широкого распространения в промышленности, несмотря на его большие достоинства: возможность регулирования «вверх» и «вниз», жесткие механические характеристики при любой скорости, широкий диапазон регулирования — 1:10 (12).

Рис. 3-17. Схема тиристорной установки для частотного регулирования скорости асинхронного электродвигателя:
1 — выпрямитель; 2 — инвертор; 3 — блок управления выпрямителем; 4 — блок управления инвертором.
Частотное регулирование перспективно при использовании статических преобразователей — тиристоров, производство которых широко развивается. В настоящее время разработано и исследовано много схем статических преобразователей. В большинстве из них происходит двукратное преобразование энергии: вначале ток промышленной частоты преобразуется в постоянный, а затем постоянный ток преобразуется (инвертируется) в трехфазный с переменной частотой. Преобразователь состоит из силового регулируемого выпрямителя, инвертора и системы управления элементами преобразователя. Принципиальная схема статического преобразователя приведена на рис. 3-17. Преобразователи подобного типа могут в будущем найти применение в установках торфяной промышленности.
Регулирование скорости асинхронных, электродвигателей осуществляется также при помощи дросселей насыщения: в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью.

Рис. 3-18. Схема асинхронного электродвигателя с дросселем насыщения в цепи статора (а) и механические характеристики электродвигателя (б).
Изменение индуктивности реактивных сопротивлений (дросселей) происходит путем изменения величины постоянного тока, протекающего через обмотку управления дросселями (рис. 3-18, а). При разных токах в управляющей обмотке в цепь статора будут вводиться переменные реактивные сопротивления, в результате чего напряжение на зажимах статора электродвигателя при данном токе нагрузки будет снижаться, чем достигается соответствующее изменение скольжения, т. е. скорости вращения (рис. 3-18,б). Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатком — существенные потери энергии в роторе, уменьшение коэффициента мощности электродвигателя, громоздкость дросселей.
Пуск асинхронных электродвигателей. Существует два основных способа пуска асинхронных электродвигателей: непосредственное (прямое) включение короткозамкнутого электродвигателя в сеть при полном или пониженном напряжении и реостатный пуск. Они широко распространены и имеют ряд видоизменений.
Прямое включение асинхронного короткозамкнутого электродвигателя на полное напряжение сети — самое распространенное среди электродвигателей малой и средней мощности. Его достоинства — простота пуска, надежность, экономичность пусковой операции. Недостатки — большой пусковой ток (5,5—7), малый пусковой момент (1,1—1,5).
Большая величина пускового тока вызывает снижение напряжения в питающей сети, в обмотках трансформатора или генератора, а также нежелательные удары в передаточных устройствах.
Снижение напряжения в питающей сети создает неблагоприятные условия как для пуска данного электродвигателя, так и для работы подключенных электроприемников. Предельная мощность асинхронного короткозамкнутого электродвигателя, пускаемого прямым включением, зависит от мощности источника питания. При питании от трансформатора силовых и осветительных электроприемников рекомендуется включать электродвигатель, мощность которого не превышает 25% мощности трансформатора по схеме прямого пуска; если трансформатор питает только силовые электроприемники, то мощность электродвигателя может составлять 75% мощности трансформатора. Правила устройства электроустановок (ПУЭ) разрешают для привода торфяных машин подключать к трансформатору прямым включением короткозамкнутый электродвигатель, равный по мощности трансформатору. Для дизель-электрических установок с синхронными генераторами, имеющих компаундирующие устройства, возможен прямой пуск короткозамкнутого электродвигателя, соизмеримого по мощности с генератором.
При пуске прямым включением может оказаться, что пусковой момент короткозамкнутого электродвигателя недостаточен для разгона. С целью улучшения пусковых характеристик применяют электродвигатели со специальным исполнением клетки ротора. Как уже отмечалось, новая Единая серия асинхронных электродвигателей АО2 имеет модификацию с повышенным пусковым моментом АОП2.
В тех случаях, когда прямое включение короткозамкнутого электродвигателя невозможно от полного напряжения сети, применяют пуск при пониженном напряжении. Возможны следующие способы понижения напряжения на зажимах электродвигателя при пуске: включение в цепь статора активного и реактивного сопротивления; применение понизительного автотрансформатора; переключение обмотки статора со звезды на треугольник. Достоинством перечисленных способов пуска при пониженном напряжении является возможность снижения пускового тока. Однако пусковой момент при этом уменьшается пропорционально квадрату снижения напряжения. Поэтому эти способы пуска могут применяться только там, где пусковой момент значительно меньше номинального, т. е. практически при пуске вхолостую.
Асинхронный электродвигатель с фазным ротором пускается в ход с помощью реостата, вводимого в цепь ротора электродвигателя посредством контактных колец и щеток. Введение сопротивления в цепь ротора позволяет снизить пусковой ток до требуемой величины и увеличить пусковой момент до значения максимального момента. Пуск производится при полностью включенных сопротивлениях реостата. По мере нарастания скорости вращения электродвигателя сопротивление реостата постепенно уменьшается за счет переключения его ступеней. После окончания процесса пуска реостат замыкается накоротко.
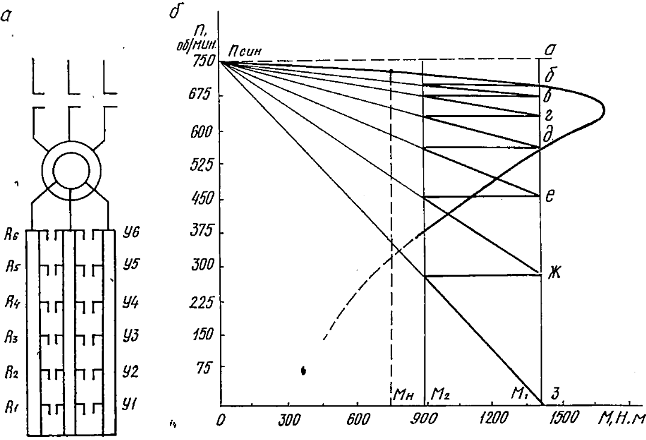
Рис. 3-19. Схема пуска (о) и пусковая диаграмма (б) асинхронного электродвигателя с фазным ротором.
В современном автоматизированном электроприводе выведение пусковых сопротивлений осуществляется путем замыкания ступеней пусковых сопротивлений контакторами ускорения (рис. 3-19, а).
Расчет пусковых сопротивлений реостата наиболее просто и удобно осуществляется графическим методом, сущность которого заключается в следующем.
На основании каталожных данных с помощью формул (3-13) и (3-14) строится естественная механическая характеристика электродвигателя (обычно устойчивая ее часть) в любом удобном масштабе (рис. 3-19,б). Затем задаются наибольшим и наименьшим пусковыми моментами. Наибольший пусковой момент Μ1 обычно принимается равным (0,8—0,85) Ммакс. Величина наименьшего пускового момента м2 должна быть несколько больше момента сопротивления, так как в противном случае электродвигатель не разгонится. Чем ближе м2 к М1, тем больше среднее значение пускового момента, что нежелательно для ускорения пускового процесса. Но, как следует из пусковой диаграммы рисунка 3-19,б, увеличение м2 вызывает увеличение числа ступеней сопротивления,
что невыгодно, так как потребует большего количества контакторов ускорения при автоматическом разгоне и большего числа контактов пускового реостата при ручном управлении. Обычно принимают 3—6 пусковых ступеней и из этого условия выбирают м2.
Реостатные механические характеристики проводятся на пусковой диаграмме последовательно, начиная с первой нижней. Отрезки аз, аж, ае... пропорциональны сопротивлениям роторной цепи и в масштабе для сопротивлений будут соответствовать сопротивлениям отдельных ступеней пускового реостата. Первой ступени соответствует отрезок аз, второй — аж, третьей — ае и т. д. Отрезок аб будет соответствовать внутреннему сопротивлению цепи ротора Rр. Первая секция пускового реостата определится отрезком жз, вторая — еж, третья — де и т. д. Сопротивление реостата во всех положениях определится отрезком бз.