При совместной работе электродвигателя с производственным механизмом к электродвигателю могут предъявляться требования, обусловленные задачами технологического процесса. Электродвигатель должен не только приводить в движение рабочую машину, но и обеспечивать ее производительную и экономичную работу. Выполнение этих задач требует от электродвигателя определенных механических и регулировочных свойств.
Осуществляя привод рабочей машины, электродвигатель может выполнять две основные функции: двигателя и тормоза.
При работе в режиме двигателя электрическая энергия, поступающая из сети, преобразуется электродвигателем в механическую, и на валу привода создается вращающий момент, обеспечивающий движение рабочей машины.
При работе в тормозном режиме к валу электродвигателя подводится механическая энергия (кинетическая энергия, запасенная в электродвигателе и в движущихся элементах приводимого им механизма), которая превращается в электрическую. Электромагнитный момент при этом, являясь уравновешивающим, препятствует движению, г. е. выполняет роль тормоза.
В зависимости от условий работы привода и схемы включения электродвигателя различают три основных способа электрического торможения:
- генераторное торможение с отдачей энергии в сеть (рекуперативное), при котором электродвигатель при торможении работает генератором, отдавая энергию в сеть;
- динамическое торможение, когда электродвигатель работает в режиме генератора, а вырабатываемая энергия расходуется в сопротивлении якорной (роторной) цепи электродвигателя;
- торможение противовключением — создается в процессе реверса, когда электродвигатель переключается на обратный ход: энергия при торможении подводится частично из сети, а частично со стороны вала электродвигателя; вся энергия при этом расходуется в сопротивлении якорной (роторной) цепи электродвигателя.
К основным показателям, характеризующим электродвигатель, относятся его регулировочные свойства. Регулирование скорости имеет первостепенное значение для многих производственных механизмов, так как при этом обеспечиваются их наилучшие техникоэкономические показатели.
Под регулированием скорости вращения электродвигателя следует понимать принудительное ее изменение согласно требованиям технологического процесса.
Регулирование скорости необходимо отличать от естественного ее изменения, связанного с изменением нагрузки на валу электродвигателя. Регулирование скорости всегда связано с изменением положения механической характеристики электродвигателя. На рис. 3-5 показан переход с естественной механической характеристики 1 на искусственную механическую характеристику 2 электродвигателя параллельного возбуждения при заданной нагрузке Мс. Такой переход позволяет осуществить изменение скорости с ω1 на ω2. Именно в этом заключается цель создания искусственных механических характеристик, обеспечивающих ту или иную скорость вращения при заданном моменте нагрузки.
При сравнении и оценке регулировочных свойств электродвигателя необходимо учитывать следующие показатели регулирования:
диапазон и плавность регулирования;
экономичность;
статическую устойчивость;
направление регулирования скорости по отношению к номинальной скорости;
мощность и момент электродвигателя при регулировании.
Диапазон регулирования при номинальном моменте нагрузки определяется отношением максимальной скорости ωмакс к минимальной ωмин, т. е.
![]()
(3-3)
Существует несколько способов выражения отношения D:
- Отношение наименьшей скорости к наибольшей обозначается в виде дроби с числителем, равным единице, например, 1:10, 1:100 и т. д. Это означает, что наибольшая скорость при номинальном токе выше наименьшей при том же токе в 10, 100 раз. Иногда принимают знаменатель дроби равным единице и получают соответственно 10:1, 100:1. Для многоскоростных асинхронных электродвигателей знак деления заменяется косой черточкой, например, 2/1. В последнее время используется более простая запись диапазона регулирования: D — 2; 3; 10 и т. д.
- Наибольшая или наименьшая скорости иногда указываются в процентах от номинальной скорости, принимаемой за 100%. Например, пределы регулирования 100—50%, т. е. снижение скорости вниз на 50%; для многоскоростных электродвигателей соответственно 100/50%.
Плавность регулирования характеризуется отношением соседних скоростей при заданном моменте нагрузки. Чем меньше это отношение, тем выше плавность. Плавность регулирования повышается с увеличением числа ступеней в одном и том же диапазону скоростей.
Экономичность регулирования определяется стоимостью регулировочных устройств и величиной суммарных потерь мощности при регулировании.
Потери мощности связаны с к.п.д. электродвигателя
![]()
(3-4).
где Р — мощность на валу электродвигателя;
Δρ — потери мощности в электродвигателе и регулирующих устройствах.
Потери мощности различны для разных способов регулирования. Они особенно заметны при реостатном регулировании, когда переключение сопротивления производится в цепи главного тока (тока якоря или ротора). В этом случае потери, а следовательно, и к.п.д. будут пропорциональны снижению скорости.
Статическая устойчивость работы электродвигателя на данной регулировочной ступени связана с жесткостью его механической характеристики. Чем больше жесткость характеристики, тем меньше сказывается влияние колебания момента нагрузки на скорость электродвигателя, тем устойчивее будет работа привода.
Направление регулирования скорости по отношению к номинальной в сторону ее уменьшения или увеличения связано со способом регулирования.
При реостатном регулировании, когда в цепь якоря (ротора) вводится дополнительное сопротивление, скорость вращения электродвигателя снижается, т. е. имеет место регулирование вниз от номинальной скорости.
При регулировании скорости электродвигателя постоянного тока ослаблением магнитного потока его регулирование осуществляется вверх от номинальной скорости.
При регулировании скорости асинхронного электродвигателя изменением числа пар полюсов все регулировочные скорости можно принимать за номинальные, поэтому здесь понятие «направление регулирования по отношению к номинальной» не имеет смысла.
Мощность и момент электродвигателя при регулировании зависят от способа регулирования. В одном случае с переходом на другую скорость момент электродвигателя остается неизменным, а мощность меняется пропорционально изменению скорости. В другом случае, наоборот, меняется момент, а мощность остается неизменной. Первый случай соответствует регулированию с постоянным моментом, второй — регулированию с постоянной мощностью.
Поясним эти положения подробнее. В процессе регулирования скорости необходимо, чтобы электродвигатель работал на всех регулировочных ступенях с номинальным током. При этом температура электродвигателя достигает допустимого предела и электродвигатель будет использован наиболее полно в отношении нагрева.
Вращающий момент электродвигателя, работающего с постоянным нагрузочным током, равным номинальному, согласно (2-3), будет равен
![]() (3-5)
(3-5)
Из уравнения (3-5) следует, что момент электродвигателя при постоянном значении тока пропорционален магнитному потоку. Если при регулировании скорости поток остается неизменным, то регулирование будет осуществляться с постоянным моментом.
Электромагнитная мощность при I=In равна
![]() (3-6)
(3-6)
Выражение (3-6) показывает, что регулирование скорости за счет изменения магнитного потока, когда произведение ωΦ=const, будет осуществляться при постоянной мощности, которую можно получить от электродвигателя на всех регулировочных ступенях.
Производственные механизмы при регулировании скорости предъявляют разные требования к регулируемому электроприводу. Одни механизмы требуют от электродвигателя постоянства мощности на всех регулировочных скоростях, например многие механизмы главного привода металлорежущих станков (токарные, карусельные, фрезерные). Другие механизмы требуют одного и того же момента вращения, например приводы механизмов подъема, передвижения, механизмы подач станков.
Поясним эти положения на примере механизма барабанной сушилки, применяемой на торфобрикетных заводах.
Сушилка требует регулирования скорости при постоянном моменте. Это требование для электропривода постоянного тока можно удовлетворить путем изменения сопротивления или подводимого к электродвигателю напряжения. При этом предельно допустимый по нагреву момент![]() — const и не зависит от скорости.
— const и не зависит от скорости.
Если для электропривода данного механизма регулирование осуществлять воздействием на магнитный поток (в сторону его снижения), то для сохранения неизменным момента на валу электродвигателя (при Мс=const) ток якоря по мере снижения потока должен возрастать. Так как при этом ток превысит номинальное значение, такой способ регулирования скорости применять в данном случае нельзя.
Таким образом, при выборе того или иного способа регулирования скорости необходимо предварительно знать те требования, которые предъявляет производственный механизм в отношении регулирования к электродвигателю. Если, например, механизм работает в процессе регулирования скорости с постоянным моментом, то с точки зрения наиболее полного использования электродвигателя и наиболее производительной и экономичной работы механизма необходимо выбрать такой способ регулирования скорости электродвигателя, чтобы момент на его валу также оставался постоянным.
При рассмотрении вопросов о допускаемой нагрузке электродвигателя в процессе регулирования предполагалось, что условия охлаждения электродвигателя остаются неизменными на всем диапазоне скоростей вращения. Следует, однако, иметь в виду, что для электродвигателей с внутренней самовентиляцией, имеющих собственный вентилятор для охлаждения, снижению скорости вращения должно соответствовать уменьшение нагрузки. Если нагрузку уменьшить нельзя (например, работа механизма при
Мс=const), то прибегают к установке продуваемых электродвигателей или обдуву электродвигателя от специального вентилятора.
Для оценки электродвигателей имеют также значение пусковые характеристики, которые определяются следующими величинами:
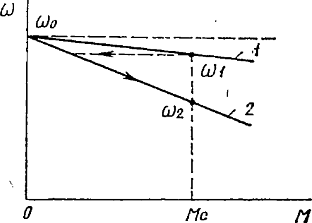
Рис. 3-5. Естественная (1) и искусственная (2) механические характеристик и электродвигателя независимого возбуждения. пусковым током, характеризуемым отношением![]() :
:
пусковым моментом характеризуемым отношением![]() плавностью пусковой операции, определяемой допускаемыми при пуске толчками тока;
плавностью пусковой операции, определяемой допускаемыми при пуске толчками тока;
временем пуска в ход;
экономичностью операции, определяемой, с одной стороны, стоимостью пусковой аппаратуры, с другой — стоимостью теряемой при пуске электроэнергии.
Основное значение для оценки пусковых характеристик имеют величины пускового тока и пускового момента. Они особенно существенны для асинхронных короткозамкнутых электродвигателей.