Глава 3
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДОВ
§ 3-1. Механические характеристики производственных механизмов и электродвигателей
При выборе электродвигателя к производственному механизму необходимо выяснить, насколько механические свойства электродвигателя соответствуют _ механическим характеристикам рабочей машины и характеру ее работы. Соответствие механических характеристик электродвигателя производственному механизму позволит обеспечить наиболее высокую производительность механизма. Несоответствие характеристик сковывает производительность рабочей машины, ухудшает экономические показатели работы электропривода.
Механические, или статические, характеристики производственного механизма представляют зависимость статического момента сопротивления механизма от скорости на его валу, т. е.
![]()
Различают четыре основных вида (класса) этих характеристик (рис. 3-1):
1. Независящая от скорости механическая характеристика (линия 1) — Мс=const. Такой характеристикой обладают рабочие машины, совершающие работу подъема, формоизменения материала или преодолевающие трение (подъемные машины, строгальные станки, бумагоделательные машины, поршневые компрессоры, механизмы передвижения и др.). Мощность таких машин растет линейно со скоростью.
2. Линейно-возрастающая механическая характеристика (линия 2) —Мс=сω. Такую характеристику может иметь, например, привод генератора постоянного тока, работающего на постоянное сопротивление. Здесь мощность пропорциональна квадрату скорости.

Рис. 3-1. Механические характеристики производственных механизмов.
- Нелинейно возрастающая (параболическая) механическая характеристика (линия 3) — Мс≈сω2. В эту группу входят все машины, работа которых сводится к преодолению сопротивления воздуха или жидкости (вентиляторы, центробежные насосы, судовые винты, центрифуги и др.). Момент сопротивления у таких машин часто называют вентиляторным, а машины — машинами с вентиляторным моментом. Мощность таких машин примерно пропорциональна кубу скорости.
- Нелинейно-спадающая механическая характеристика (линия 4) —

Такой характеристикой обладают металлорежущие станки токарной группы, моталки в металлургической промышленности, электронакат в бумажной промышленности. Мощность на валу у подобных машин приблизительно постоянна.
Механические характеристики электродвигателя представляют зависимость скорости от развиваемого им на валу вращающего момента.
Механические характеристики электродвигателя разделяют на естественные и искусственные. Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика создается при работе электродвигателя с параметрами,, отличными от номинальных (например, при введении сопротивления в цепь ротора, при изменении напряжения или частоты питающей сети и т. д.).
Для оценки изменения скорости при изменении момента на валу служит так называемая жесткость характеристики, которая равна отношению приращения момента к соответствующему приращению скорости (рис. 3-2):
![]() (3-1)
(3-1)
Естественные механические характеристики электродвигателей по степени жесткости разделяются на следующие группы (рис. 3-3):
- Абсолютно жесткая характеристика (линия), при которой скорость электродвигателя с изменением момента нагрузки остается неизменной (β =~); к этой группе относятся синхронные электродвигатели.
- Жесткая характеристика (линия 2), при которой скорость электродвигателя с изменением момента нагрузки уменьшается на небольшую величину (β = 40—10). К этой группе относятся, например, асинхронные электродвигатели, работающие при скольжениях, меньших критического, и электродвигатели постоянного тока с параллельным возбуждением.
- Мягкая механическая характеристика (линия 3), при которой скорость электродвигателя резко уменьшается при увеличении момента нагрузки (β<10); примером может служить электродвигатель постоянного тока с последовательным возбуждением.
При совместной работе электродвигателя с производственным механизмом в установившемся режиме вращающий момент электродвигателя уравновешивается статическим моментом сопротивления.

Рис. 3-2. Изменения скорости и момента, поясняющие жесткость механической характеристики электродвигателя параллельного возбуждения. I
Этому состоянию равновесия моментов соответствует определенная скорость вращения электродвигателя. При изменении момента сопротивления на валу электродвигателя равновесие моментов нарушается. Согласно закону сохранения энергии, изменившемуся статическому моменту должно соответствовать новое значение момента электродвигателя. Возникает переходный режим, в процессе которого система автоматически переходит в новое установившееся состояние, но с другими значениями момента и скорости электродвигателя.
Рассмотрим этот процесс на конкретном примере и выясним особенности электродвигателя автоматически поддерживать равновесие системы при меняющемся моменте сопротивления.
На рис. 3-4 приведены механическая характеристика 3 электродвигателя параллельного возбуждения и две механические характеристики 1 и 2 производственного механизма с моментами Мс1 и Мс2, не зависящими от скорости (например, подъемная лебедка).
Характеристика 1 соответствует статическому моменту Мс1.
Ток якоря электродвигателя при работе с моментом Мс1 равен
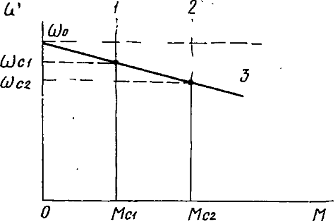
Рис. 3-4. Механические характеристики электродвигателя и производственного механизма.
Рис. 3-3. Механические характеристики электродвигателей.
![]() (3-2)
(3-2)
Электромагнитный момент, создаваемый током якоря Мд1=аФ11, уравновешивается моментом сопротивления. Мс1:
![]()
Этому состоянию равновесия моментов соответствует установившаяся скорость вращения электродвигателя сос1.
При увеличении статического момента от Мс1 до Мс2 момент электродвигателя также должен возрасти до Мд2 =Мс2. При практически постоянном потоке const увеличение момента должно идти за счет возрастания тока якоря. При постоянных напряжениях сети U и сопротивлении цепи якоря возрастанию тока должно соответствовать снижение э. д. с. Е1 или при Ф=const снижение скорости вращения электродвигателя. Уменьшение скорости и соответствующее увеличение тока якоря будут происходить автоматически, пока моменты электродвигателя и сопротивления механизма не уравновесятся. Новому моменту электродвигателя Мд2 будет соответствовать установившаяся скорость ωс2.
Таким образом, в электродвигателе роль автоматического регулятора, осуществляющего устойчивую работу системы, выполняет э. д. с. якоря (ротора).
Рассмотренные условия работы электропривода в установившемся режиме характеризуют статическую устойчивость привода, когда изменение во времени скорости и момента происходит относительно медленно в отличие от динамической устойчивости, имеющей место при переходных режимах.
Устойчивая работа электропривода в пределах определенных скоростей и моментов сопротивления производственного механизма требует подбора соответствующей механической характеристики электродвигателя. Это может быть достигнуто выбором электродвигателя определенного типа и изменением электрических параметров его цепей.