Глава 4
ОБЛАСТЬ ПРИМЕНЕНИЯ И ВИДЫ СПЕЦИАЛЬНЫХ ЭЛЕКТРОПРИВОДОВ
§ 4-1. Механические характеристики специальных электроприводов
В некоторых случаях по соображениям конструктивного характера или с целью уменьшения момента инерции электропривода, а также по ряду других причин (повышение надежности работы привода, отсутствие электродвигателя требуемой мощности, получение специальных регулировочных характеристик) прибегают к электроприводам, состоящим обычно из двух электродвигателей, соединенных между собой механическим или электрическим способом, — двухдвигательным электроприводом. Такие электроприводы находят применение в подъемно-транспортных установках (портальные и козловые краны), в механизмах металлургической промышленности, в специальных установках большой мощности. Двухдвигательные электроприводы находят также применение в установках торфопредприятий (например, механизм передвижения путепереукладчика на железнодорожном ходу ППР-2М).
Совместная работа двух электродвигателей имеет два основных исполнения: жесткую механическую связь между электродвигателями, когда оба электродвигателя находятся на одном общем валу с рабочей машиной; электрическую связь, когда электродвигатели соединены по схеме электрического вала, при которой достигается их синхронное вращение. Применяются две основные схемы электрического вала: схема синхронного вращения двух асинхронных электродвигателей с общим реостатом в роторной цепи и схема синхронного вращения электродвигателей с вспомогательными машинами.
Синхронное вращение электроприводов по схеме электрического вала применяется в металлорежущих станках, в разводных мостах, в конвейерах и в других механизмах, где применение механической связи между отдельными звеньями рабочей машины, расположенными на сравнительно большом расстоянии, приводит к очень сложным передачам и громоздким конструкциям.
§ 4-2. Двухдвигательный электропривод с жесткой механической связью
На рис. 4-1,а приведена схема двухдвигательного электропривода с жесткой механической связью трехфазных асинхронных электродвигателей. Механические характеристики 1 и 2 отдельных электродвигателей изображены на рис. 4-1,б.
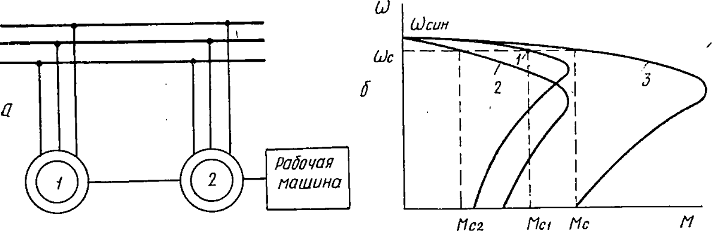
Рис. 4-1. Схема включения (а) и механические характеристики (б) двухдвигательного электропривода с двумя асинхронными электродвигателями.
Общая механическая характеристика 3 представляет собой результат сложения характеристик отдельных электродвигателей по оси моментов, так как при работе двух электродвигателей на одну механическую нагрузку их общий момент равен сумме моментов обоих электродвигателей. Анализ механических характеристик, приведенных на рис. 4-1,б, позволяет сделать следующие выводы:
- При совпадении механических характеристик электродвигателей, работающих на один общий вал, суммарная нагрузка распределится между электродвигателями поровну. При несовпадении характеристик электродвигатель, имеющий более жесткую характеристику, возьмет большую долю нагрузки, т. е. будет потреблять из сети больший ток.
- Суммарная нагрузка двухдвигательного электропривода распределяется между электродвигателями более равномерно, если оба они имеют мягкие механические характеристики.
Пуск и регулирование скорости при двухдвигательном приводе производится так же, как и при однодвигательном. Каждый из электродвигателей имеет свою пускорегулирующую аппаратуру. Это дает возможность раздельной работы электродвигателей в случае ремонта или осмотра одного из них, а также перехода на работу с одним электродвигателем при уменьшении нагрузки.
Двухдвигательный электропривод с жесткой механической связью позволяет получать жесткие механические характеристики при низких, так называемых ползучих скоростях. Получение ползучих скоростей возможно, если одна из электрических машин будет работать в двигательном режиме, а другая в тормозном — противовключения или динамического торможения.
На рис. 4-2 приведены механические характеристики двухдвигательного асинхронного электропривода. Характеристики соответствуют схеме, в которой первая машина работает электродвигателем (кривая 1), а вторая — в режиме динамического торможения (2). Результирующая характеристика (3) представляет собой алгебраическую сумму характеристик 1 и 2.
Приводы с подобными характеристиками применяются в подъемных и других установках. Вначале оба асинхронных электродвигателя работают в двигательном режиме, а перед остановкой в обмотку статора одного из электродвигателей подается постоянный ток, что приводит к резкому снижению скорости привода. Затем оба электродвигателя отключаются и останавливаются. Предварительное замедление позволяет получить остановку в заданной точке пути с гораздо большей точностью, чем при торможении с полной скоростью.
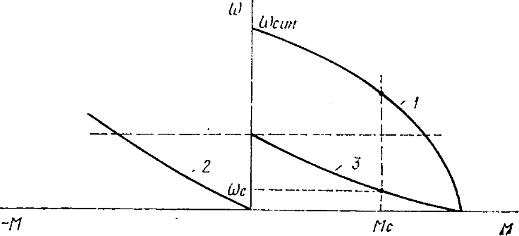
Рис. 4-2. Механические характеристики двухдвигательного электропривода с двумя асинхронными электродвигателями, один из которых работает в двигательном, другой — в тормозном режиме.
Приведенные способы получения ползучих скоростей очень неэкономичны, так как связаны с большими потерями энергии, а поэтому использование подобных режимов допустимо только на короткое время.
Двухдвигательный асинхронный электропривод позволяет осуществить регулирование скорости по схеме каскадного включения. Идея каскада двух асинхронных электродвигателей с фазными роторами состоит в следующем.
При регулировании скорости вращения электродвигателя изменением сопротивления роторной цепи в ней теряется значительное количество энергии. Эту энергию можно использовать, если подвести ее электрически к другому электродвигателю, соединенному механически с первым на общем валу.
Соответствующая схема приведена на рис. 4-3, а. Ротор электродвигателя 1 соединен механически и электрически с ротором электродвигателя 2. Для того чтобы моменты, создаваемые первым и вторым электродвигателем, складывались, необходимо осуществить перекрещивание проводов, соединяющих роторы 1 и 2.
При каскадном включении все происходит так, как если бы мы имели один электродвигатель с числом пар полюсов, равным сумме чисел пар полюсов первого электродвигателя (p1 и второго электродвигателя (р2).
Скорость каскада определяется формулой
![]()
Заставив электродвигатели сначала работать в параллельном (нормальном) соединении (рис. 4-3, а), а затем в каскаде (рис. 4-3, б), можно получить две скорости при p1=p2: ![]()

Рис. 4-3. Схемы включения двухдвигательного электропривода с двумя асинхронными электродвигателями: а — нормальная схема, б — схема каскада.
Подобная схема каскадного включения электродвигателей используется, например, в приводе передвижения путепереукладчика ППР-2М, применяемого в транспортных установках торфопредприятий.
§ 4-3. Система электрического вала с двумя асинхронными электродвигателями и общим реостатом в роторной цепи
На рис. 4-4 изображена схема электрического вала, выполненная при помощи общих сопротивлений в роторной цепи. При такой схеме в случае равенства нагрузок и скоростей обеих машин э. д. с. роторов 1 и 2 будут равны и направлены навстречу друг другу. Угол рассогласования роторов при этом равен нулю, а электрическая энергия скольжения будет теряться в общем реостате. Если нагрузка одного из электродвигателей увеличится, его скорость начнет снижаться, а э.д.с. ротора будет возрастать. В цепи роторов появится уравнительный ток, который создаст добавочный электромагнитный момент. В соответствии с этим можно рассматривать момент, развиваемый каждым электродвигателем, как алгебраическую сумму рабочего и уравнительного моментов.
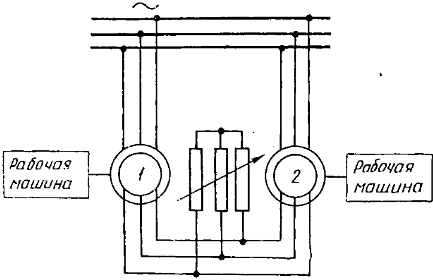
Рис. 4-4. Система электрического вала с общим реостатом в роторной цепи.
Для более нагруженного электродвигателя добавочный момент вычитается из рабочего, для менее нагруженного — оба момента будут складываться. В результате скорость первого электродвигателя начнет возрастать, а второго — снижаться. Это вызовет выравнивание скоростей, и оба электродвигателя будут продолжать вращаться синхронно.
Если полностью вывести реостат, уравнительный ток в цепи роторов протекать не будет, так как каждый ротор окажется замкнутым накоротко. Практика использования подобных схем электрического вала показывает, что для создания устойчивой работы электродвигателей скольжение при номинальном режиме должно составлять 30—40%. Необходимость иметь такие скольжения приводит к большим потерям энергии в реостате, что является существенным недостатком схемы.
§ 4-4. Система электрического вала с двумя асинхронными электродвигателями и вспомогательными асинхронными машинами
На рис. 4-5 приведена схема электрического вала, где 1Д и 2Д — рабочие электродвигатели, 1BM и 2ВМ — вспомогательные или уравнительные машины.
При одинаковых скоростях рабочих электродвигателей ток в роторной цепи вспомогательных машин будет равен нулю (встречные э.д.с. равны друг другу). При увеличении нагрузки и соответственно снижении скорости на одном из электродвигателей равенство э.д.с. нарушится, и в роторной цепи вспомогательных машин потечет уравнительный ток. Вспомогательные машины будут создавать свои моменты, которые приведут к выравниванию скоростей рабочих электродвигателей.
К недостаткам этой системы следует отнести наличие дополнительных синхронизирующих машин, которые удорожают установку и усложняют ее эксплуатацию.

Рис. 4-5. Система электрического вала с вспомогательными асинхронными машинами.
Вопросы для самопроверки
- Для какой цели применяется двухдвигательный электропривод?
- Как определить распределение нагрузок между электродвигателями при двухдвигательном приводе и чем можно обеспечить одинаковую нагрузку при применении асинхронных электродвигателей с фазным ротором?
- Какими способами можно получить «ползучие» скорости при наличии двухдвигательного привода?
- В чем заключается сущность регулирования скорости при каскадном включении двух асинхронных электродвигателей с фазным ротором, имеющих жесткое соединение на общем валу?
- Поясните принцип работы систем электрического вала, приведенных на рис. 4-5.