§ 7-3. Схемы управления неавтоматизированными электроприводами
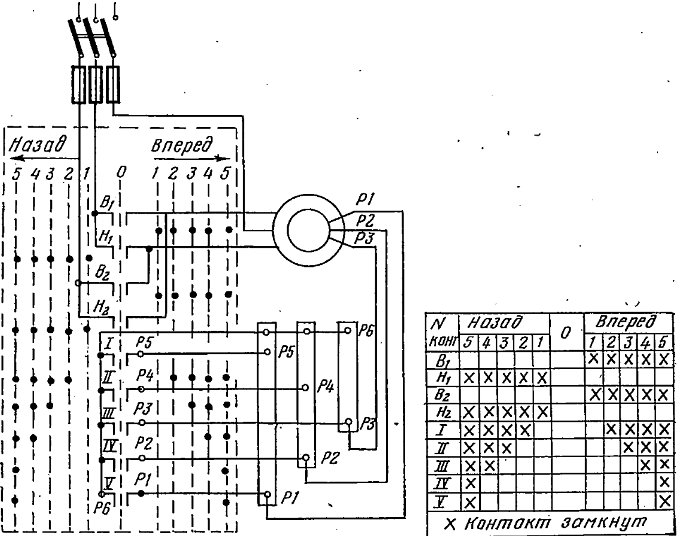
Рис. 7-2. Схема управления асинхронным электродвигателем с фазным ротором при помощи кулачкового контроллера.
В системах неавтоматизированного электропривода все переключения в цепях электродвигателей осуществляются с помощью аппаратов ручного управления. В простейших случаях такими аппаратами являются рубильники, переключатели, пакетные выключатели, в более сложных — контроллеры, специальные переключатели.
На рис. 7-2 приведена принципиальная схема управления силовыми цепями асинхронного электродвигателя с фазным ротором при помощи кулачкового контроллера. На этом же рисунке приведена таблица замыканий контактов контроллера (контроллерная диаграмма), которая обычно дается для удобства чтения схем с кулачковыми контроллерами. Приведенная схема позволяет, осуществлять следующие процессы: пуск, останов, реверсирование и регулирование скорости. Привод контроллера имеет, кроме нулевого, пять фиксированных положений Вперед и пять фиксированных положений Назад.
Из схемы и таблицы замыканий контактов следует, что в положении О привода контроллера все контакты разомкнуты.
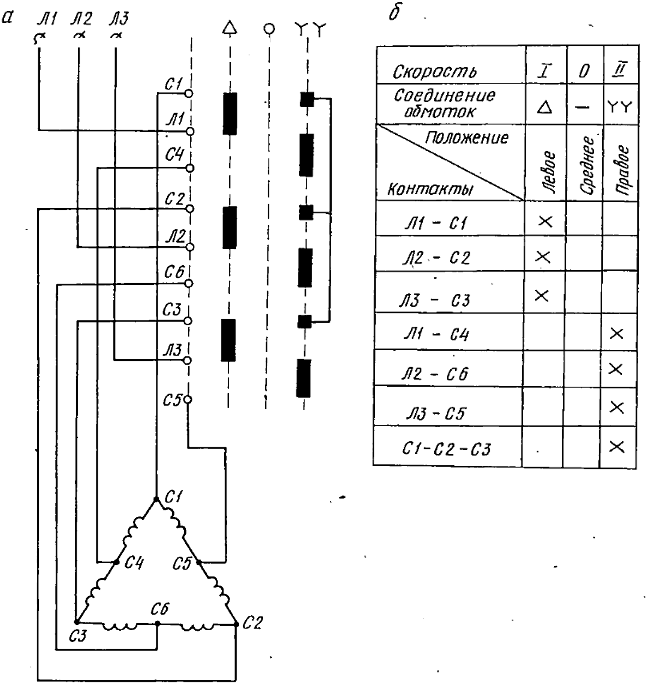
Рис. 7-3. Схема управления двухскоростным асинхронным электродвигателем при помощи барабанного переключателя (а) и контроллерная диаграмма (б).
В положении 1 Вперед замыкаются контакты В1 и В2 цепи статора, которые остаются включенными на всех пяти положениях контроллера. В положении 1 Назад замыкаются контакты Н1 и Н2 цепи статора, что соответствует переключению двух фаз и реверсированию электродвигателя. Контакты Н1 и Н2 также остаются включенными на всех пяти положениях контроллера.
В положении 1 Вперед или Назад привода контроллера все секции пусковых сопротивлений включены в цепь ротора. В положении 2 замыкается контакт I и секция Р1—Р5 пускового сопротивления закорачивается. В положении 3 контакт II закорачивает секцию Р2—Р4; в положении 4 контакт III закорачивает секцию Р3—Р6; в положении 5 контакты IV и V полностью выводят пускорегулирующие сопротивления из цепи ротора. Схема данного контроллера, как следует из рассмотрения рисунка, предусматривает неравномерное выключение пусковых ступеней.
На рис. 7-3,а приведена схема ручного управления двухскоростным асинхронным электродвигателем при помощи барабанного переключателя. Схема осуществляет переключение статорной обмотки электродвигателя с треугольника на двойную звезду. Привод барабанного переключателя имеет три фиксированных положения: нулевое, левое и правое.
В пулевом положении все контакты переключателя разомкнуты и электродвигатель отключен от сети. При установке привода переключателя в левое положение замыкаются контакты Л1—C1, Л2—С2 и Л3—С3. Обмотка статора при этом включается по схеме треугольника, что соответствует меньшей скорости вращения электродвигателя. В правом положении переключателя замыкаются контакты Л1—С4, Л2—С6, Л3—С5; контакты С1—С2—С3 соединяются в нулевую дочку. Такое замыкание контактов включает обмотку статора по схеме двойная звезда, что позволяет получить большую скорость вращения электродвигателя (примерно в два раза).
На рис. 7-3,б приведена также контроллерная диаграмма, поясняющая положение контактов переключателя.
§ 7-4. Схемы автоматического управления электроприводами
Автоматическое управление электроприводами, как уже отмечалось, осуществляется главным образом с помощью релейно-контактной автоматики. Особенно легко автоматизируются электроприводы с асинхронными короткозамкнутыми электродвигателями. Дистанционное и автоматическое управление пуском и остановом этих электродвигателей в схемах релейно-контактного управления обычно осуществляется с помощью контакторов, магнитных пускателей.
Элементная схема дистанционного нереверсивного управления асинхронным электродвигателем с короткозамкнутым ротором приведена на рис. 7-4. Здесь включение и отключение электродвигателя осуществляется замыкающими главными контактами контактора Л (линейный), включенными в цепь обмотки статора. Подача команд на включение производится вручную нажатием на кнопку П (Пуск) с замыкающим контактом, а на отключение — на кнопку С (Стоп) с размыкающим контактом. В схеме предусмотрена защита электродвигателя от токов короткого замыкания — предохранителями и от длительных перегрузок — тепловыми реле 1РТ и 2РТ.
После включения рубильника Р (рис. 7-4, а) нажатием на кнопку 11 замыкается цель 1—3—5—6—4—2 катушки контактора Л (рис. 7-4,б), который срабатывает и своими главными контактами замыкает цепь статора электродвигателя. Одновременно с главным замыкается и вспомогательный контакт (блок-контакт контактора), закрепленный на траверсе контактора, что позволяет отпустить кнопку П, так как она зашунтируется блок-контактом.
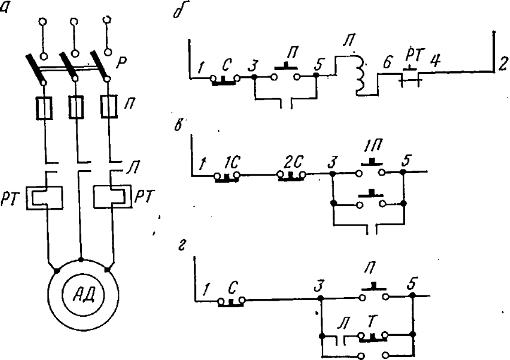
Рис. 7-4. Элементная схема дистанционного управления асинхронным электродвигателем с короткозамкнутым ротором: а — схема силовых цепей; б — схема цепей управления; в — схема включения кнопок для подачи команд с двух рабочих мест; г — схема включения кнопки толчкового режима работы.
Для останова электродвигателя нажимают на кнопку С, осуществляя тем самым разрыв на участке 1—3 цепи питания обмотки контактора Л. Якорь электромагнита отпадает и обоими главными контактами отключит электродвигатель от сети, а блок-контакт произведет дополнительный разрыв цепи управления на участке 3—5.
В случае перегрузки электродвигателя тепловые реле 1РТ и 2РТ своими размыкающими контактами разорвут цепь управления на участках 6—4 и 4—2, что приведет к автоматическому отключению электродвигателя.
Отключение электродвигателя от сети происходит также при исчезновении напряжения или при понижении его ниже 70% от номинального, так как электромагнит контактора при этих условиях не может удержать якорь в притянутом положении, и последний отпадает.
При коротком замыкании в цепи электродвигателя плавкие вставки предохранителя ПР мгновенно перегорают и отключают электродвигатель от сети.
Схема позволяет осуществить и ряд других вариантов управления, например дистанционное включение и отключение электродвигателя с нескольких мест, для чего необходимо кнопки П и С разных постов управления включить, как показано на рис. 7-4,в.
Толчковый (наладочный) режим работы может быть получен при установке дополнительной двухцепной кнопки Т (толчок), которую необходимо включить, как показано на рис. 7-4, г. Из схемы следует, что электродвигатель в этом случае будет работать только во время нажатия кнопки Т.
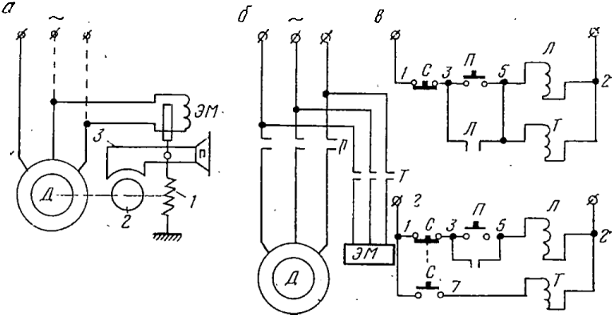
Рис. 7-5. Схемы включения асинхронных электродвигателей с механическим торможением при останове.
Сокращение времени свободного выбега при останове механизма может быть достигнуто механическим или электрическим торможением.
При механическом торможении схема управления электродвигателем и тормозом должна быть составлена так, чтобы в момент включения электродвигателя в сеть механизм растормаживался, а при отключении электродвигателя от сети автоматически затормаживался. Варианты схем управления электродвигателями с механическим торможением при останове приведены на рис. 7-5.
На рис. 7-5, а торможение электродвигателя Д и приводимого· им механизма (на рисунке не показан) осуществляется за счет трения тормозной колодки 3, которая прижимается под действием пружины 1 к шкиву 2. Однофазный электромагнит ЭМ (или трехфазный) подключен непосредственно к зажимам электродвигателя, поэтому при его включении в сеть (контактором, пускателем, автоматом и т. д.) он срабатывает и, преодолевая действие пружины снимает колодку механического тормоза со шкива.
Достоинством приведенного способа торможения является простота схемы и то, что торможение осуществляется не только при отключении электродвигателя по команде оператора, но и при. исчезновении напряжения в сети, обрыве проводов в цепи электродвигателя или электромагнита, перегорании вставок предохранителей и т. д. Поэтому механическое торможение под действием пружины с растормаживанием с помощью электромагнита находит широкое применение в крановых и других аналогичных установках.
На рис. 7-5,б приведена схема включения трехфазного электромагнита отдельным контактором Т (тормозной). Обмотка контактора Т включается параллельно обмотке линейного контактора Л, как показано на рис. 7-5,в.
В ряде случаев, например в металлорежущих станках, длительное включение обмотки электромагнита в сеть нежелательно вследствие дополнительного потребления электроэнергии. Заторможенное состояние механизма после остановки также нежелательно, так как часто возникает необходимость провернуть вручную шпиндель станка.
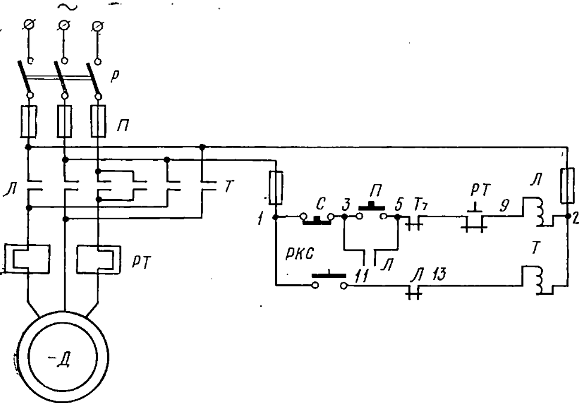
Рис. 7-6. Схема управления асинхронным короткозамкнутым электродвигателем при торможении противовключением.
В этом случае применяют механический тормоз, в котором растормаживание происходит под действием пружины, а торможение — под действием электромагнита. Включение электромагнита такого тормоза осуществляется по схеме, приведенной на рис. 7-5, б, а элементная схема одного из вариантов цепей дистанционного управления приводом изображена на рис. 7-5, а. В схеме включение и отключение электродвигателя осуществляется контактором Л при нажатии на кнопки П или С. Контактор Т включает электромагнит ЭМ только при нажатой кнопке С, для чего в схеме используется двухцепная кнопка с размыкающим (цепь 1—3) и замыкающим (цепь 1—7) контактами. После отпускания кнопки контактор Т отпадает и выключает электромагнит ЭМ, прекращая торможение.
Недостатками механического торможения является относительная сложность и громоздкость тормозного устройства, плохая регулировка величины тормозного момента, большая зависимость его от состояния трущихся тормозных поверхностей, быстрый износ, необходимость замены отдельных деталей и др. Этих недостатков лишены электрические способы торможения.
Из электрических способов торможения наиболее широко применяется торможение противовключением и динамическое.
Схема управления асинхронным короткозамкнутым электродвигателем при торможении противовключением для остановки привода приведена на рис. 7-6. Здесь включение электродвигателя в сеть при пуске осуществляется линейным контактором Л по цепи 1—3—5—7—9—2.
Автоматическое управление процессом торможения выполнено с помощью реле контроля скорости РКС.

Во время пуска электродвигателя, когда его скорость достигнет 10—15% номинальной, реле РКС замкнет свой контакт, включенный в цепь контактора Т (цепь 1—11), но контактор Т не сработает, так как блок-контакт Л в цепи 11—13 при работе электродвигателя разомкнут. При нажатии на кнопку С контактор Л отключает электродвигатель от сети и одновременно замыкает свой блок-контакт в цепи контактора Т (15—2). Скорость вращения электродвигателя мгновенно не спадает из-за инерции, поэтому контактор Т сработает и включит электродвигатель в обратном направлении. Произойдет интенсивное торможение, и, когда скорость рабочей машины будет близкой к нулю, контакт РКС разомкнется и отключит электродвигатель от сети, не допуская его разгона в обратном направлении.
В схеме управления предусмотрена взаимная блокировка контакторов Г и Л размыкающими блок-контактами, исключающая возможность одновременного включения контакторов, что привело бы к короткому замыканию питающей сети.
На рис. 7-7 приведена схема динамического торможения асинхронного электродвигателя с короткозамкнутым ротором. Как известно, при динамическом торможении статор электродвигателя отключают от сети трехфазного тока и подключают к сети постоянного тока.
Включение электродвигателя в сеть трехфазного тока и его отключение осуществляются контактором Л при нажатии на кнопки П или С. Контактор Л при включении разрывает размыкающим блок-контактом цепь 15—17 контактора торможения Τ, а замыкающим блок-контактом подает постоянный ток в катушку реле РВ. Реле РВ мгновенно замыкает свой замыкающий с выдержкой времени при размыкании контакт в цепи 11—13 катушки контактора торможения Т и тем самым подготавливает его к включению.
При нажатии кнопки С контактор Л отпадает, и электродвигатель отключается от сети. Размыкающий блок-контакт Л в цепи 13—15 замыкается, и контактор Т включает постоянный ток в обмотку статора. Начинается процесс торможения. Одновременно замыкающий блок-контакт Л в цепи катушки реле РВ размыкается, и реле начинает отсчет выдержки времени. По окончании выдержки реле отпадает и, размыкая свой контакт в цепи 11—13, выключает контактор Т, а последний выключает постоянный ток, прекращая торможение. Поэтому длительность выдержки времени у реле РВ должна быть достаточной для полной остановки электродвигателя. В схеме предусмотрена взаимная блокировка контакторов Л и Т, которая обеспечивается размыкающими блок-контактами в цепях 5—7 и 13—15.
Управление процессом динамического торможения может осуществляться и в функции скорости электродвигателя, для чего может быть применено реле направления вращения, например реле РКС. В этом случае реле РВ из схемы исключается, а его контакт в цепи 11—13 заменяется замыкающим контактом реле направления вращения.
Во многих производственных механизмах требуется изменение направления вращения электродвигателя. В этом случае схема дистанционного управления должна обеспечить возможность пуска электродвигателя в любом требуемом направлении.
На рис. 7-8, а приведена схема силовых цепей трехфазного электродвигателя при реверсивном управлении. Здесь контактор В (Вперед) обеспечивает включение электродвигателя в одном направлении, а Н (Назад) — в другом направлении вращения. Защита цепей от токов короткого замыкания осуществляется автоматическим выключателем А с мгновенным расцепителем максимального тока, а от перегрузки электродвигателя — общим для обоих направлений тепловым двухэлементным реле РТ с одним (общим) размыкающим контактом.
Схема цепей управления реверсивного магнитного пускателя (рис. 7-8,б) содержит две подобные друг другу цепи управления контакторами В и Н с помощью двухцепных кнопок В и Н, имеющих по одному замыкающему и одному размыкающему контакту. Кнопка С с размыкающим контактом и блок-контакт РТ — общие для обеих цепей.
Нажатием на кнопку В при неподвижном электродвигателе включается контактор В, и электродвигатель начинает вращаться в определенном направлении (например, вправо), а нажатием на кнопку Н при неподвижном электродвигателе включается контактор Н, и электродвигатель начнет вращаться в обратном направлении — влево (т. е. схема при пуске из неподвижного состояния работает аналогично схемам нереверсивного управления).
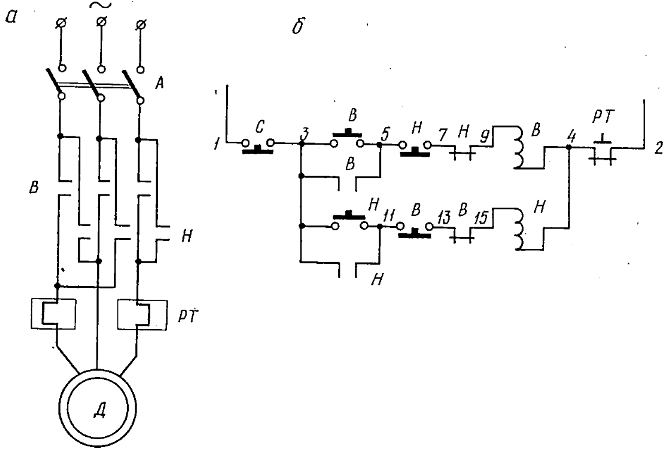
Рис. 7-8. Схема реверсивного управления асинхронным короткозамкнутым электродвигателем.
Если электродвигатель уже вращается, например вправо (т. е. контактор В включен и его блок-контакт в цепи 3—5 замкнут, а в цепи 13—15 разомкнут), то нажатием на кнопку Н производится его реверсирование. При нажатии на кнопку Н цепь 5—7 размыкается и обмотка контактора В теряет питание, а цепь 3—11 замыкается. Контактор В отключает электродвигатель от сети и, замыкая блок-контакт в цепи 13—15, включает контактор Н. При этом блок-контакт Н в цепи 3—11 замыкается и обеспечит питание обмотки Н после отпускания кнопки Н, а главные контакты контактора Н подключат электродвигатель к сети по схеме левого направления вращения. Вращающийся по инерции электродвигатель будет вначале интенсивно тормозиться в режиме противовключения, а после остановки сразу же начнет разгоняться в обратном направлении. Реверс с левого направления на правое происходит аналогично после нажатия на двухцепную кнопку В.
Останов электродвигателя без торможения (свободный выбег) осуществляется после нажатия на кнопку С. Преимуществом приведенной схемы является возможность реверсирования без предварительного нажима на кнопку С.
В ряде случаев дистанционного управления электроприводами возникает необходимость защиты производственного механизма от поломки или заклинивания при ограниченном пути перемещения рабочего органа механизма. Такая защита выполняется обычно конечными механическими выключателями. На рис. 7-9 приведена схема реверсивного управления электроприводом, предусматривающая такую защиту. В цепи контакторов В и Н установлены конечные выключатели, соответственно КВВ (конечный выключатель хода вперед) и КВН (конечный выключатель хода назад).

Рис. 7-9. Схема реверсивного управления асинхронным короткозамкнутым электродвигателем с конечными выключателями.
При подходе рабочего органа к крайнему правому положению закрепленный на нем упор воздействует на выключатель КВВ и, размыкая его контакт, выключает контактор В. При этом электродвигатель останавливается в процессе свободного выбега. Аналогично работает выключатель КВН при подходе рабочего органа к крайнему левому положению.
Асинхронные двух-, трех- и четырехскоростные электродвигатели в зависимости от схемы переключения обмоток и требований технологического процесса имеют различные схемы управления. Один из вариантов схем управления двухскоростным однообмоточным электродвигателем приведен на рис. 7-10.
Схема обеспечивает возможность получения двух скоростей с соотношением 2:1 путем переключения обмотки статора электродвигателя с треугольника на двойную звезду,
При нажатии на кнопку П1 включается контактор К, который подготавливает электродвигатель для включения по схеме медленно (М) или быстро (Б). Нажатием кнопки М включается контактор 1К, соединяющий обмотки статора электродвигателя по схеме треугольник. При нажатии на кнопку Б включаются контакторы 2К и 3К, соединяющие обмотку статора по схеме двойная звезда.
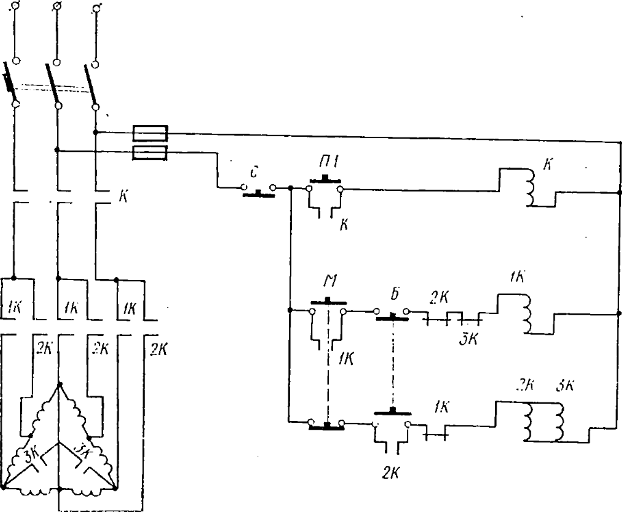
Рис. 7-10. Схема реверсивного управления двухскоростным асинхронным электродвигателем.
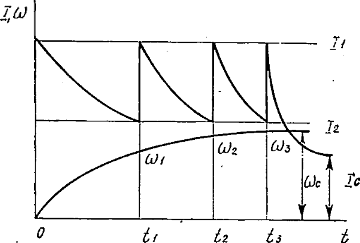
Рис. 7-11. Пусковая диаграмма электродвигателя с тремя ступенями пускового сопротивления.
Схема допускает переход с одной скорости на другую без остановки электродвигателя.
Особенностью схемы является наличие двухцепных кнопок, которые позволяют осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов. Асинхронные электродвигатели с фазным ротором пускаются в ход с помощью пусковых сопротивлений, включаемых в цепь ротора. По мере разгона электродвигателя сопротивления шунтируют ступенями до полного их закорачивания. Шунтирование при релейно-контакторном управлении осуществляется автоматически, что по сравнению. с ручным управлением позволяет более точно выдержать заданные условия пуска и освобождает человека от необходимости выполнять однообразные утомительные операции.
Автоматическое шунтирование пусковых ступеней, как это следует из пусковой диаграммы, приведенной на рис. 7-11, можно осуществлять при определенной скорости вращения (ω1, ω2 и ω3), определенной величине тока и через определенные промежутки времени (t1, t2 и t3).

Рис. 7-12. Схема пуска асинхронного электродвигателя с фазным ротором в функции времени с тремя пусковыми ступенями..
В соответствии с этим момент шунтирования может осуществляться по результатам автоматического контроля одной из трех следующих величин: 1) в функции скорости; 2) в функции тока; 3) в функции времени.
Наиболее часто управление процессом автоматического разгона асинхронных электродвигателей с фазным ротором выполняется В функции времени с использованием электромагнитных и других реле времени. Одна из подобных схем приведена на рис. 7-12.
При нажатии кнопки П включается контактор Л, который своими главными контактами включает в сеть электродвигатель с полностью включенным пусковым реостатом. Одновременно начинает отсчет времени пристроенное к контактору Л маятниковое реле времени.
По окончании отсчета времени реле замыкает свой контакт в цепи 1—7 и включает контактор ускорения, который шунтирует первую пусковую ступень 1П и запускает пристроенное к нему реле времени. После отсчета времени замыкается цепь 9-11 и включается контактор 2У, шунтируя ступень 2П и запуская третье реле. После срабатывания ЗУ пусковой реостат будет полностью закорочен, а скорость вращения и ток электродвигателя достигнут установившихся значений ωс и Iс (рис. 7-11), определяемых нагрузкой на его валу.
Схемой предусмотрено автоматическое отключение контакторов 1У и 2У в конце процесса пуска, для чего контактор ЗУ становится на самопитание через контакт ЗУ в цепи 7—13 и размыкает цепь 7—9.
Вместо пристраиваемых к контакторам реле могут быть использованы реле времени других типов.
Вопросы для самопроверки
- Какие преимущества имеет автоматическое управление перед ручным?
- Назовите основные функции, выполняемые схемами релейно-контакторной автоматики.
- Поясните основные различия в начертании элементных и монтажных схем управления электроприводами.
- Рассмотрите схемы автоматического торможения электроприводами с асинхронными короткозамкнутыми электродвигателями, приведенными на рис. 7-6 и 7-7, и поясните, как осуществляется взаимная блокировка линейного контактора и контактора торможения.
- Начертите принципиальную схему реверсирования асинхронного короткозамкнутого электродвигателя.
- Поясните с помощью элементной схемы защиту асинхронного электродвигателя при работе в крайних положениях.
- Поясните принцип автоматического разгона асинхронного электродвигателя с фазным ротором. Рассмотрите схему разгона асинхронного электродвигателя, приведенную на рис. 7-12, и укажите целесообразность отключения контакторов 1У и 2У в конце процесса пуска.