Постановка вопроса
Токопередающий аппарат находится в довольно стесненных условиях. Высокое напряжение на коллекторе, определенная степень защищенности машин создают трудности в помещении вибродатчиков на щетку. Если возможно укрепить датчик, то следует помнить, что он должен иметь температурную компенсацию, экранировку для защиты от электромагнитных полей и определенную изоляцию. Наряду с этим при весах щеток 1—30 г собственный вес датчика должен составлять не более 5—10% веса щетки, ибо больший вес резко исказит истинную картину колебаний токопередающего аппарата. Что касается чувствительности датчика, то она должна быть довольно высокой, так как перемещения щеток измеряются микронами. Но допустим, что датчик, обладающий вышеперечисленными качествами, есть. Что же он будет показывать? Сигналы, поступающие с датчика, будут следствием колебаний сложной механической системы, какую представляет электрическая машина. При этом токопередающий аппарат и его элементы могут входить в резонанс при частотах от десятков до десятков тысяч герц, а спектр возмущающих сил, зависящий от качества подшипников, дисбаланса якоря и деформаций коллектора, может быть чрезвычайно разнообразным.
Отсюда ясно, что фильтрация показаний датчика вряд ли поможет определить перемещения щеток относительно коллектора. Как в процессе конструирования и исследования при определении различных элементов токопередающего аппарата и их влияний на его вибрационные свойства, так и при настройке токопередающего аппарата в реальной машине на помощь может прийти метод электромеханических аналогий, применение которого в данном вопросе было предложено инж. А. И. Золотухиным и И. И. Туктаевым.
Понятие об электромеханической аналогии
На данном этапе развития теоретическая электротехника располагает хорошо разработанным математическим аппаратом, применяющимся для исследования различных процессов в электрических цепях, а именно: методами расчета цепей и переходных процессов в сложных электрических схемах, расчетом колебаний в связанных электрических контурах и т. д. Электрическая аналогия позволяет перенести готовые решения колебательных процессов для электрических цепей на механические системы, причем характер колебательных процессов в механических системах при этом становится более наглядным, что подготавливает почву для электрического моделирования токопередающих аппаратов.
Колебания заряда, вызванные периодической э. д. с. в электрическом контуре, состоящем из индуктивности, конденсатора и сопротивления, удовлетворяют уравнению
![]() (9-1)
(9-1)
Закон перемещения массы, на которую действует пружина, сила трения и внешняя периодическая сила, выражается уравнением
![]() (9-2)
(9-2)
Уравнения (9-1) и (9-2) указывают на то, что между электрическими и механическими колебаниями есть аналогия, причем инерция массы соответствует индуктивности, сопротивления трения — активному сопротивлению, коэффициент упругости пружины — величине обратной емкости, и механическая сила, действующая на тело,— э. д. с.
На рис. 9-1 представлены сложная механическая система и электрическая схема замещения к ней. Колебательные процессы в электрической схеме могут быть рассчитаны известными из электротехники методами с последующим перенесением результатов на механическую систему.
При составлении электрической схемы замещения соблюдается ряд правил:

Применение электрической аналогии к анализу работы токопередающего аппарата электрической машины
Поступление энергии вибрации к токопередающему аппарату происходит как со стороны щитов и корпуса электрической машины, так и со стороны коллектора.
Электрическая схема замещения токопередающего аппарата для общего случая показана на рис. 9-2. Если не учитывать

Учитывая тот факт, что скорость в механической системе соответствует току в электрическом контуре, можем, пользуясь методом электрической аналогии, записать закон ее, изменения:
Таким образом, щетка должна следовать за коллектором тем быстрее, чем меньше будут ее масса, жесткость пружины и больше нажатие.
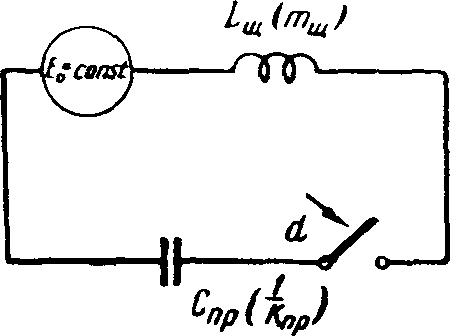
Рис. 9-3. Упрощенная электрическая схема замещения в случае движения щетки за коллектором.
Электрическая аналогия позволяет провести более детальный анализ колебаний токопередающего аппарата с учетом всех его параметров и обусловливает переход к электрическому моделированию колебательных процессов в нем.
Рассмотрим возможность моделирования токопередающего аппарата при воздействии на него со стороны коллектора. Положение щетки, работающей в реактивном щеткодержателе, или щетки, жестко скрепленной с пружиной, с достаточной степенью точности определяется одной координатой. В то время, если пренебречь качанием щетки в щеткодержателе реверсивной машины и считать ее колебания в нормальном на правлении к коллектору основными, получаем механическую систему с одной степенью свободы, уравнение движения которой можно составить, воспользовавшись принципом Д'Аламбера:
![]()
(9-3)
Для электрической цепи, в которой заряд изменяется аналогично смещению щетки, должно соблюдаться уравнение
![]()
(9-4)
Из (9-3), (9-4) получаем три общих уравнения, решение которых позволяет подобрать параметры для электрического моделирования, а именно:
![]()
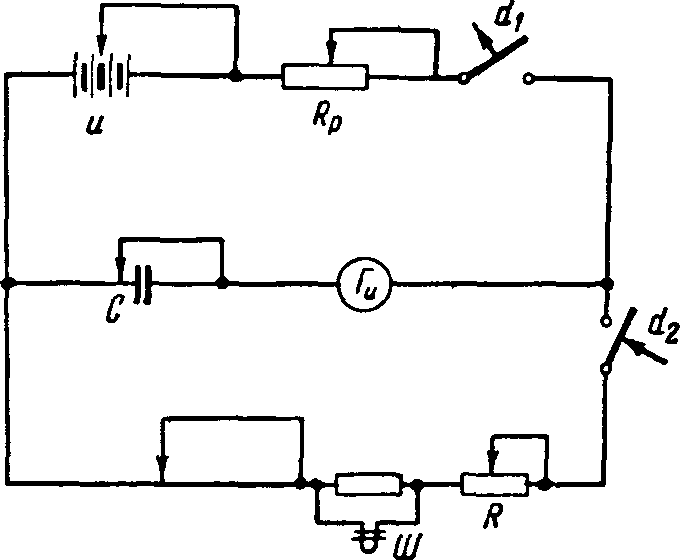
Рис. 9-4. Схема моделирования токопередающих аппаратов.
Так как в трех уравнениях имеется четыре неизвестных, Е0 можем задаваться. Меняя L, С, R(i) в схеме моделирования (рис. 9-4), можем получить самые разнообразные сочетания, отражающие различные токопередающие аппараты.
Для записи колебаний в электрической моделирующей схеме рубильник d1 отключается при одновременном включении рубильника d2 с целью сохранения постоянства заряда емкости перед включением ее на колебательный контур.
Если требуется определить реакцию токопередающего аппарата
на ударную нагрузку со стороны пластин коллектора, моделирование осуществляется с использованием генератора импульсов Ги.
Сопоставление инерционных и демпфирующих свойств токопередающих аппаратов, определенных с помощью электрического моделирования, с «динамической» поверхностью коллектора дало возможность определить параметры зон неустойчивого контакта.
Искусственное вибрирование токопередающих аппаратов, которые подверглись моделированию, с одновременным пропусканием по ним микротоков подтвердило наличие значительных инерционных и недостаточных демпфирующих качеств у токопередающих аппаратов. Доказательством этого вывода явилось также применение торцовых коллекторов ввиду того, что токопередающие аппараты, работающие на них, обеспечивали удовлетворительный (хороший) контакт, так как требование к ним в отношении определенных демпфирующих и инерционных свойств отпали.