ГЛАВА ВОСЬМАЯ
НАЛАДКА И НАСТРОЙКА ДОБАВОЧНЫХ ПОЛЮСОВ
8-1. РАЗЛИЧНЫЕ МЕТОДЫ НАЛАДКИ И НАСТРОЙКИ ДОБАВОЧНЫХ ПОЛЮСОВ
Классификация методов
В. Т. Касьянов [Л. 8-1] методы проверки и регулировки добавочных полюсов разделял на следующие три основные группы в порядке возрастающей практической пригодности:
- Метод потенциальных щеточных диаграмм.
- Метод тока искрения.
- Метод безыскровых зон.
Такая классификация для того времени была вполне обоснованной. Однако она не может учитывать всех особенностей существующих в настоящее время способов наладки добавочных полюсов.
С нашей точки зрения, классификация методов наладки и настройки коммутации следует провести на основе тех требований, которые должны предъявляться к этим методам с точки зрения полноты и четкости решения вопросов, связанных с обеспечением наилучших возможных условий коммутации. Такими позволяющими более полно и четко решать поставленную задачу являются следующие требования:
- При проведении наладки и настройки коммутации метод должен обеспечить выявление характера искрения щеток, без чего в ряде случаев нельзя правильно решать вопросы, связанные с настройкой коммутации.
- Метод должен дать не только суждение о качестве работы добавочных полюсов, но и четкие выводы о необходимых количественных изменениях тока обмотки этих полюсов или числа витков ее для обеспечения наименьшего искрения щеток.
- При проведении настройки добавочных полюсов необходимо иметь совершенно ясное представление о степени искрения щеток при различных токах нагрузки в стационарном режиме.
- В тех случаях, когда машина предназначается для работы с резкими переходными режимами, необходимо обеспечить суждение о характере коммутации во время переходных процессов.
- Метод настройки коммутации должен обеспечить проведение работ для получения наименьшего искрения и в таких случаях, когда при малых нагрузках или даже при холостом ходе имеется очень слабое искрение щеток.
Вполне понятно, что при наладке коммутации не всегда целесообразно выполнять все указанные требования, так как столь широкая программа исследований машины требует достаточно сложной аппаратуры и сравнительно много времени. Подобного рода обследование машины необходимо проводить лишь тогда, когда более простые методы не дают желаемых результатов. Что же касается крупных машин, предназначенных для работы в весьма тяжелых условиях коммутации, то в таких случаях наиболее полное обследование в соответствии со всеми указанными выше требованиями обеспечит более точную и быструю наладку коммутации.
Все существующие способы наладки коммутации можно свести в следующие группы:
- Потенциальные щеточные диаграммы.
- Способы настройки коммутации при посредстве U-образных кривых.
- Способ настройки по безыскровым зонам В. Т. Касьянова и его модификации.
- Метод реактивного треугольника А. Я. Бергера [Л. 8-2].
- Метод Е. М. Синельникова и А. Г. Назикяна [Л. 8-3].
Метод потенциальных щеточных диаграмм
Этот метод достаточно широко известен как с точки зрения теоретических обоснований, так и в смысле методики проведения опытов, а поэтому на этих вопросах нет необходимости останавливаться.
Практические возможности этого метода достаточно полно изложены В. Т. Касьяновым (Л. 8-1], который по этому поводу писал: «Необходимо лишь отметить, что потенциальные диаграммы дают только качественную оценку коммутации, т. е. позволяют установить наличие либо слишком сильного, либо слишком слабого коммутирующего поля (и отчасти его распределение), но не дают количественных указаний в отношении необходимых изменений воздушного зазора добавочных полюсов и их ампер-витков возбуждения. Следовательно, к определению этих величин приходится подходить ощупью, путем последовательного приближения, снимая ряд потенциальных диаграмм параллельно с изменением зазора или ампер-витков возбуждения. Таким образом, проверка добавочных полю сов превращается в очень длительное и трудоемкое лабораторное исследование», и далее заключает; «Необходимо, однако, подчеркнуть, что в опытных руках потенциальная диаграмма щетки может дать много ценных указаний относительно дефектов и способов их устранения».
Если же рассмотреть этот метод с точки зрения тех требований, которые должны предъявляться для обеспечения правильной настройки коммутации машины при любом режиме ее работы, то в этом смысле метод потенциальных щеточных диаграмм по существу не удовлетворяет ни одному из пяти отмеченных выше требований.
Слабые возможности метода потенциальных щеточных диаграмм, снимаемых посредством магнитоэлектрического вольтметра, объясняются тем, что в щеточном контакте при искрении существует несколько различных по своей природе падений напряжений, причем падение напряжения, связанное с искрением, имеет резко выраженный импульсный характер с очень большой скважностью. Помимо этого, в контакте между щеткой и коллектором существуют переменные составляющие падения напряжения коллекторной и зубцовой частот и, наконец, постоянная составляющая этого напряжения. Следовательно, если желательно измерить напряжение в контакте, связанное с искрением, то необходимо устроить вольтметр таким образом, чтобы другие составляющие не влияли на его показания, в особенности это относится к постоянной составляющей, которая определяется вольт-амперной характеристикой щетки. Так как эта характеристика для некоторых щеток имеет в области значительных плотностей тока вид Δu=const, а в большинстве случаев падение напряжения либо возрастает при увеличении тока, либо, наоборот, уменьшается, то в подобных случаях влияние данного фактора на показания вольтметра может быть более значительным, чем влияние импульсов, связанных с искрением, несмотря на то, что амплитудные значения этих импульсов значительно больше постоянной составляющей падения напряжения в контакте из-за очень большой скважности.
В некоторых случаях импульсы падения напряжения, связанные с искрением щеток, оказывают весьма заметное влияние на показания магнитоэлектрического вольтметра, увеличивая его показания при возникновении искрения. Например, у одного очень мощного генератора, имеющего коллекторные пластины шириной всего лишь 5 мм, а линейную скорость вращения коллектора 35 м/сек, при возникновении искрения падение напряжения, измеренное магнитоэлектрическим вольтметром, возрастало более чем в 2 раза вследствие того, что продолжительность горения дуг была при сильном искрении значительной по времени, но главное влияние здесь определялось большим количеством коммутационных циклов в единицу времени, что приводило к уменьшению скважности у данных импульсов напряжения.
В большинстве же случаев, в особенности у машин сравнительно небольшой мощности, потенциальные щеточные диаграммы не могут давать вполне четкой картины искрения щеток, а в отдельных случаях, как, например, при наличии вольт-амперной характеристики щетки ниспадающего вида, могут приводить к неправильным выводам. Этим именно и объясняется различие мнений отдельных исследователей относительно возможности правильного суждения о коммутации по потенциальным щеточным диаграммам.
Значительно лучшие результаты получаются, если при снятии потенциальных щеточных диаграмм применяются магнитоэлектрические вольтметры с двухполупериодным выпрямителем и конденсатором, которые позволяют, во-первых, передавать на вольтметр импульсы различных направлений, а во-вторых, не пропускать постоянной составляющей падения напряжения в контакте. Передача импульсов обоих знаков на вольтметр является весьма желательной, так как при хорошей настройке добавочных полюсов некоторая часть секций оказывается недокомпенсированной, а примерно такое же количество секций работает при перекомпенсации. При других условиях импульсы того или иного знака превалируют, а при сильном искрении импульсы будут одного знака, но их направления в зависимости от степени возбуждения добавочных полюсов будут различными. Следовательно, если желательно, чтобы вольтметр достаточно хорошо отражал уровень искрения в различных частях щеточного контакта, следует для измерения искрения выполнять схему, описанную выше. Такой вольтметр впервые начал применять Ю. Е. Неболюбов в 1955 г. в своих исследованиях коммутации коллекторных машин переменного тока.
Настройка коммутации посредством U-образных кривых
Сравнительно давно был разработан метод настройки коммутации, называемый методом тока искрения, пользуясь которым, можно определить по U-образным кривым требуемую величину воздушного зазора между добавочными полюсами и якорем либо число ампер-витков возбуждения этих полюсов. Этот метод, требующий очень много труда, в настоящее время почти не применяется. Получаемые во время опыта токи нагрузки, соответствующие начальной степени искрения при различных воздушных зазорах между добавочными полюсами и якорем либо при разных токах в обмотке возбуждения добавочных полюсов, наносили на графики (рис. 8-1,а и б), по которым и определяли требуемые параметры добавочных полюсов, соответствующие наименьшему искрению щеток.
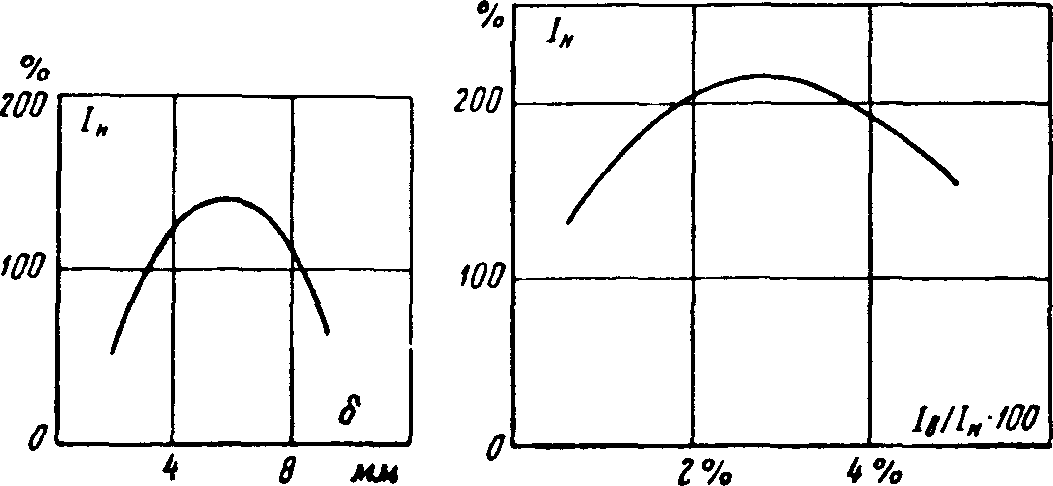
Рис. 8-1. Настройка коммутации по методу тока искрения.
а — изменением величины воздушного зазора; б — изменением тока возбужденна добавочных полюсов.
Этот метод настройки добавочных полюсов не дает полного представления об искрении электрических машин, так как наносимые на график точки соответствуют начальной стадии искрения и, следовательно, для каждой величины воздушного зазора или числа ампер-витков обмотки возбуждения имеется лишь значение тока, при котором начинает образовываться искрение, а каково поведение машины при других токах нагрузки, какой запас по искрению имеется в каждом отдельном случае, об этом никаких суждений получить нельзя. Впрочем, данным недостатком обладают все методы настройки коммутации по U-образным кривым.
В 1948 г. была опубликована автором статья [Л. 2-7], в которой излагался новый метод настройки коммутации по U-образным кривым с применением электронной аппаратуры. На рис. 8-2,а изображена схема для снятия зависимости амплитудных значений падения напряжения в сбегающем крае щетки Uмакс от тока возбуждения добавочных полюсов Iд.п при неизменном токе нагрузки, а на рис. 8-2,в нанесена эта зависимость в виде графика, из которого по наименьшему значению Uмакс определяется оптимальное значение тока добавочных полюсов при данной нагрузке. На рис. 8-2,б дана другая схема включения приборов, согласно которой электронный амплитудный вольтметр включается между краями щетки.

В последующем для настройки коммутации пробовали применять селективные амплитудные вольтметры для снятия U-образ- ных кривых, но амплитудный вольтметр и в этом виде не смог дать надежных результатов. Причиной этого является то, что искрение характеризует не только высота импульса напряжения в щеточном контакте, но и количество этих импульсов в единицу времени, а также и их продолжительность, чего ни в какой степени не учитывает амплитудный вольтметр. Значительно большие практические результаты дает подключение но данным схемам электронного осциллографа, позволяющего провести анализ искрения щеток (см. гл. 6).
Практическое значение метод U-образных кривых получил после того, как был разработан прибор, учитывающий наряду с высотой импульса его ширину и количество их в единицу времени. Такие приборы в США были разработаны Руманисом, а у нас в СССР Л. Л. Лавриновичем (рис. 3-1). Этот прибор состоит из магнитоэлектрического вольтметра, в цепь которого подключены фильтры, которые препятствуют попаданию в прибор переменной составляющей коллекторной и зубцовой частот. Перед вольтметром же включен двухполупериодный выпрямитель, обеспечивающий учет импульсов напряжения коммутационной природы обоих знаков. Такой прибор подключается непосредственно к зажимам машины, т. е. к положительным и отрицательным щеткам, благодаря чему он учитывает искрение под всеми щетками машины, что является большим преимуществом этого метода настройки коммутации.
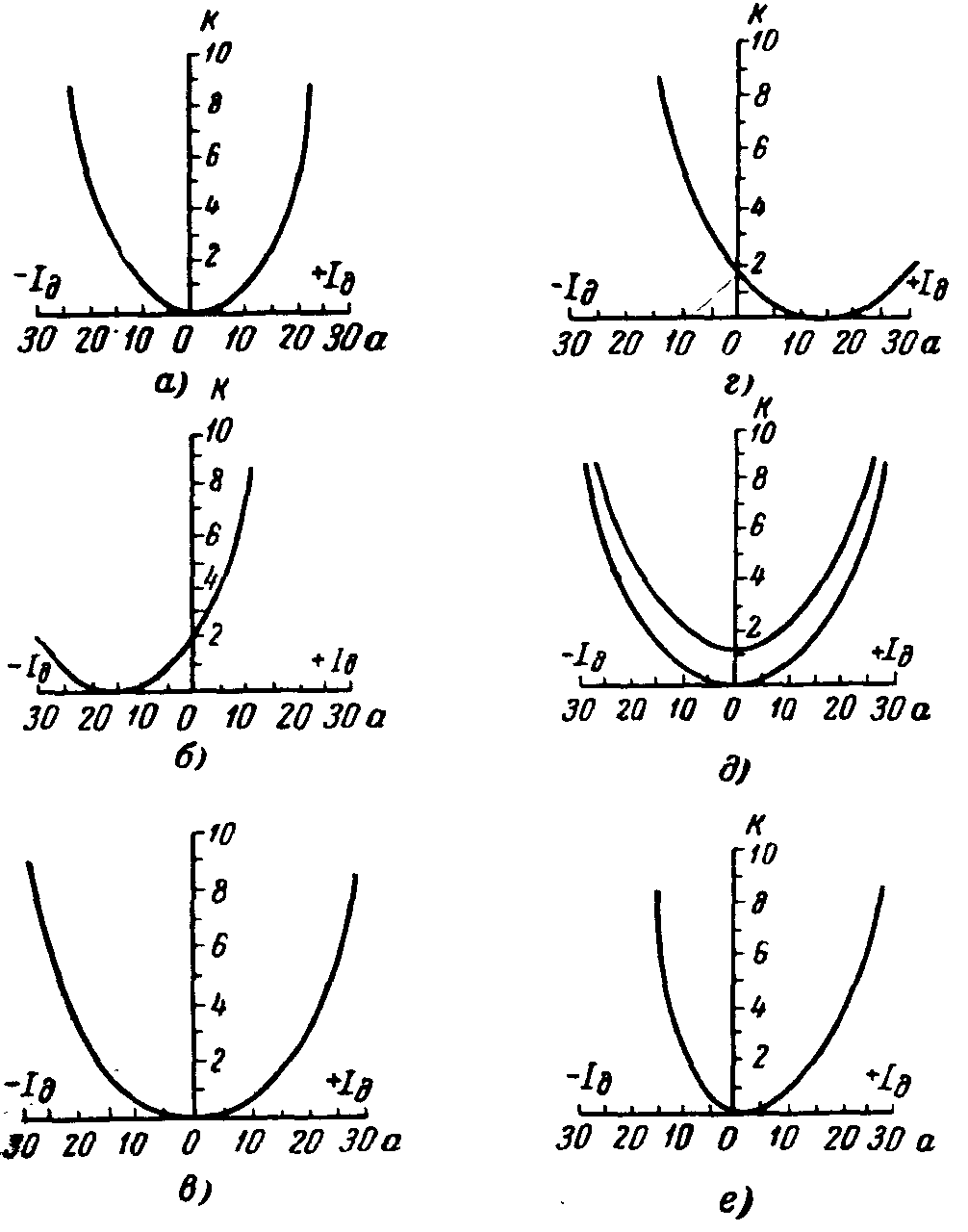
Рис. 8-3. Зависимости индекса искрения К от тока подпитки и тока отпитки — Iд при различных условиях.
а — при холостом ходе и правильном положении щеточной траверсы; б — при холостом ходе и со смещенной щеточной траверсой в направлении вращения якоря; в — при номинальной нагрузке и оптимальном поле добавочных полюсов; г — при поминальной нагрузке и слабом поле добавочных полюсов; д — нижняя кривая при отсутствии вибрации; верхняя кривая — при наличии вибраций; е — при нарушении коллекторной пленки
На рис. 8-3,а дана U-образная кривая, полученная при холостом ходе машины при правильном положении щеточной траверсы, а на рис. 8-3,б при смешенной траверсе в направлении вращения якоря. Казалось бы, на основе данного опыта можно найти правильное положение щеточной траверсы, обеспечив при отсутствии подпитки добавочных полюсов минимальное показание прибора, отмечающего искрение щеток. Однако нам кажется, что не всегда найденное положение щеточной траверсы при холостом ходе машины будет также наилучшим при включении машины на нагрузку (см. гл. 6).
На рис. 8-3,в приведены U-образные кривые, полученные при номинальной нагрузке и при оптимальном возбуждении добавочных полюсов, а на рис. 8-3,г — при слабом поле добавочных полюсов. На основании приведенных кривых можно прокорректировать параметры добавочных полюсов по наименьшему искрению при данной нагрузке генератора.
На рис. 8-3,б приведены две U-образные кривые, одна из них, по мнению Руманиса, соответствует спокойной работе щетки в механическом отношении, а другая для машины с вибрирующими щетками. Нам кажется, такой метод определения вибраций щеток является в высшей степени сомнительным, так как U-образная кривая может подняться над началом координат и при наличии чисто коммутационных факторов искрения щеток.
В статье дается способ определения состояния оксидной пленки на коллекторе по U-образным характеристикам (рис. 8-3,е). На нем приведена U-образная кривая для случая нарушения коллекторной пленки, подпитка и отпитка добавочных полюсов, по мнению автора, дают различную степень искрения щеток. Следует, однако, указать, что и это утверждение вызывает большие сомнения, так как на основе большого опыта снятия безыскровых зон и зон определенной балльности искрения установлено, что токи подпитки и отпитки могут быть равны, как правило, только для какой-либо одной нагрузки, т. е. средняя линия зоны не совпадает с осью абсцисс и не всегда является прямой линией, а приведенные Руманисом U-образные кривые имеют такой вид только для случая, когда коллекторная пленка является устаревшей.
U-образные кривые для различных нагрузок машины приведены на рис. 8-4. Как видно по данным кривым, по мере увеличения нагрузки U-образные кривые поднимаются, что вполне понятно. Однако полная симметрия относительно вертикальной оси этих кривых при всех нагрузках машины является по меньшей мере загадочной, так как это противоречит кривым безыскровых зон, снимаемым по методу В. Т. Касьянова, который на протяжении свыше двух десятилетий применяется для настройки и наладки коммутации во всем мире и не вызывает никаких сомнений.
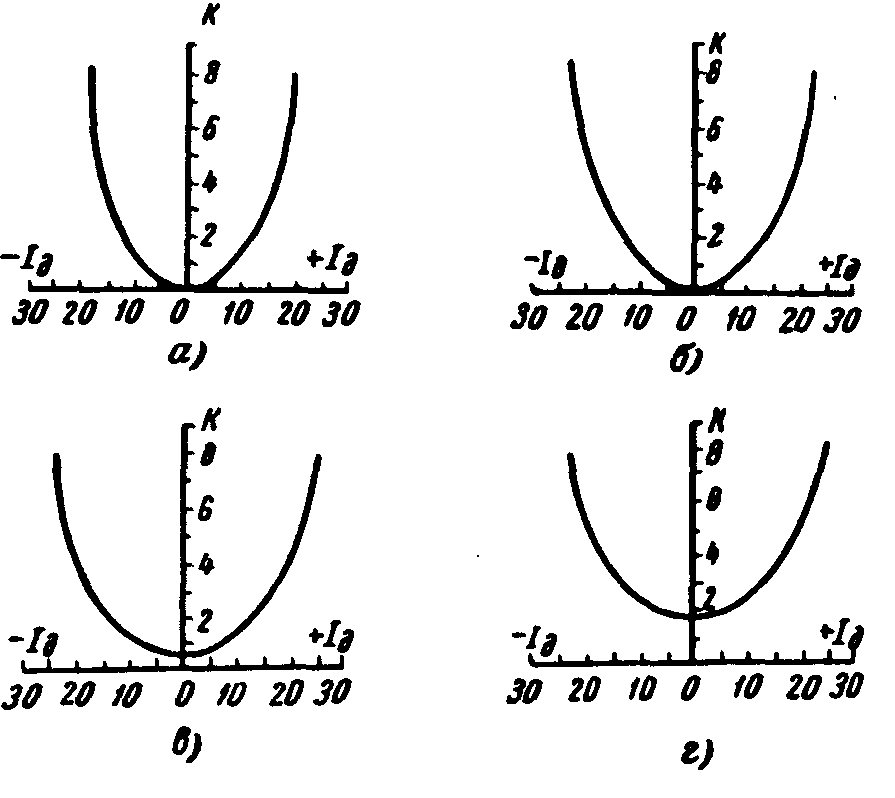
Рис. 8-4. Зависимости индекса искрения К, определяемого по прибору (в условных единицах) от тока подпитки и отпитки добавочных полюсов.
а — при 0,25 номинальной нагрузки; б — при 0,5 номинальной нагрузки; в — при номинальной нагрузке; г — при 1,5-номинальной нагрузки.
В заключение следует отметить, что рассмотренный здесь метод настройки коммутации, помимо того, что ряд выводов, сделанных на основе U-образных кривых, вызывает основательные сомнения, обладает еще и другими весьма существенными недостатками, а именно:
- Этот метод не дает представления о коммутационной устойчивости машины. Если при наличии безыскровой зоны отчетливо виден запас по искрению для всех нагрузок, то по U-образным кривым суждения об этом сделать нельзя.
- Показания прибора в условных единицах для различных машин при одной и той же степени искрения щеток будут различными, а поэтому сопоставлять искрение разных машин по U-образным кривым нельзя.
Есть все основания полагать, что использование приборов Руманиса и Л. Л. Лавриновича для настройки коммутации по методу безыскровых зон даст значительно большие результаты.
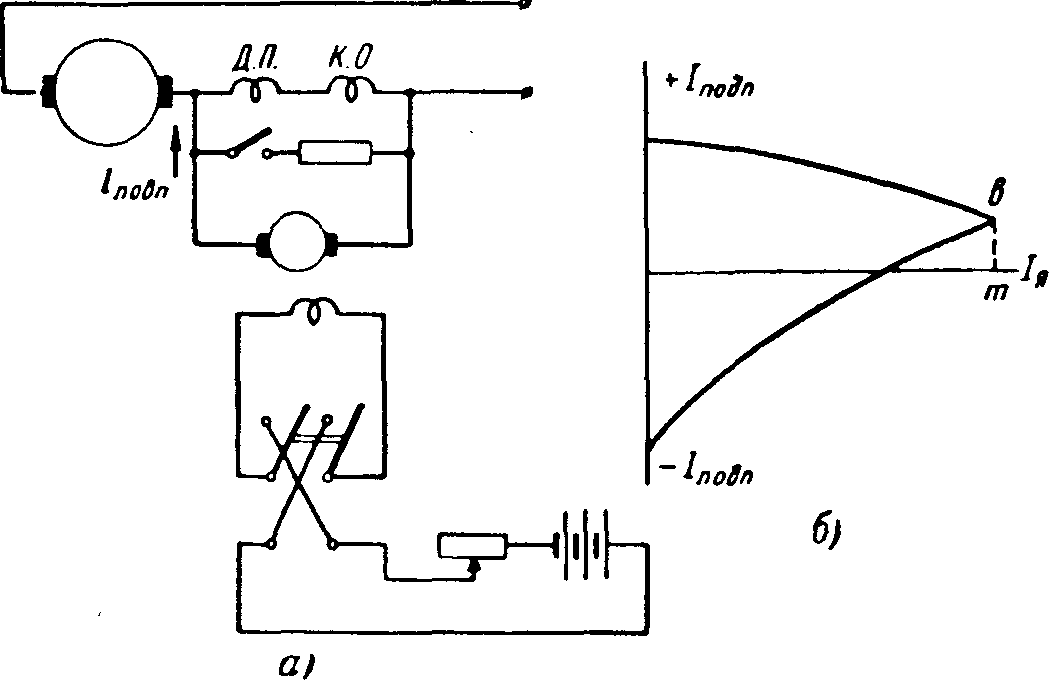
Рис. 8-5.
а — схема для настройки коммутации по методу безыскровых зон; б — безыскровая зона.
Способ настройки коммутации по безыскровым зонам и его модификации
Как известно, наладку и настройку коммутации по методу безыскровых зон В. Т. Касьянова ведут по схеме на рис. 8-5,а, пользуясь которой для различных нагрузочных токов устанавливают токи подпитки и отпитки добавочных полюсов либо до появления искрения, либо искрение доводят до определенной балльности. На основе полученных значений токов подпитки и отпитки при различных нагрузках строят либо график безыскровой зоны, либо зоны, соответствующей определенной степени искрения щеток (рис. 8-5,б).
Пересчет параметров добавочных полюсов ведут по формулам
![]()
(8-1)
Данный метод настройки коммутации получил преимущественное распространение, так как зона подпитки по этому методу, полученная непосредственно по искрению щеток, дает возможность не только определить оптимальные параметры добавочных полюсов, но одновременно площадь безыскровой зоны или зоны той или иной балльности искрения является хорошим показателем коммутационной устойчивости машины.
Большое количество новых методов, а также существующих модификаций объясняется тем, что, во-первых, безыскровая зона может быть снята не для всех машин (в некоторых случаях приходится зону снимать для 2-балльного искрения), а во-вторых, безыскровая зона не всегда является хорошим показателем устойчивости коммутации, так как в некоторых случаях начавшееся искрение очень сильно прогрессирует, а поэтому, помимо безыскровой зоны, желательно снимать и зоны для различных степеней искрения щеток. Снятие же зон для определенных баллов искрения при оценке степени искрения щеток на глаз сводит практически значение зоны подпитки как показателя качества коммутации к нулю, так как различные настройщики коммутации весьма по-разному определяют балльность искрения.
Правда, для определения оптимальных параметров добавочных полюсов это не играет существенной роли, так как опыт показывает, что зоны, снятые различными настройщиками, хотя и отличаются очень сильно по своим размерам, но средние Линии этих зон, по которым и пересчитывают параметры добавочных полюсов, практически совпадают.
Для того чтобы исключить элемент субъективности из этого метода, было сделано много попыток создать прибор, способный объективно оценивать степень искрения щеток. Однако из всех приборов, которые предназначались для данной цели, практическое значение, с нашей точки зрения, имеют только два прибора, а именно: индикатор искрения щеток ИИ-1, описанный в гл. 3, и прибор ИВ-4, созданный Л. Л. Лавриновичем в СССР и Руманисом в США, описание которого дано в той же главе.
Индикатор искрения щеток ИИ-1 используется как с фотоэлектрическим датчиком, так и посредством включения его для суммирования импульсов падения напряжения в сбегающей части щеток. Использование этого прибора с фотоэлектрическим датчиком описано в гл. 7.
В последнее время прибор ИИ-1 испытан во время настройки коммутации сравнительно большого количества машин при использовании его для суммирования и усреднения импульсов напряжения в сбегающей части щеток. С этой целью он подключался к одной из рабочих щеток и вспомогательной, расположенной около сбегающей части рабочей щетки [Л. 5-2]. Преимущества такого включения прибора ИИ-1 заключаются в том, что, во-первых, при данном включении он учитывает искрение щеток вне зависимости от того, видимо оно для глаза или нет, а во-вторых, по экрану электронно-лучевой трубки прибора совершенно четко выявляется характер искрения щеток (см. гл. 7).
Особенно большое преимущество этого прибора выявляется тогда, когда настраивается коммутация машин, работающих с толчками тока. На экране электронно-лучевой трубки и в этом случае весьма отчетливо виден характер искрения щеток, причем фотографирование картины искрения щеток с экрана трубки прибора не представляет труда и во время толчков тока. Нам кажется, что это пока единственный способ анализа искрения щеток при таком характере нагрузки, позволяющий в таком кратковременном режиме получить картину распределения искрения по коллектору, благодаря чему можно судить, сколько секций в таком режиме работает с перекомпенсацией, а сколько являются недокомпенсированными. На основе этого совершенно объективно можно установить степень перекомпенсации машины для достижения минимального искрения при толчках тока.
Правда, в приборе ИИ-1 в настоящее время электронно-лучевая трубка имеет очень малый диаметр, а поэтому при проведении опытов с крупными машинами приходилось параллельно с трубкой этого прибора включать электронный осциллограф с трубкой значительно большего диаметра. В новой же партии этих приборов, которые будут выпущены в недалеком будущем, предусмотрена трубка значительно большего диаметра с разверткой луча по окружности.
Что касается прибора ИВ-4, то основное его преимущество состоит в том, что он очень просто приключается к исследуемой машине и контролирует искрение всех щеток вне зависимости от того, видимо их искрение или нет. Но прибор ИВ-4 имеет и некоторые весьма существенные недостатки, отмеченные в гл. 3.
Нам кажется, что эти два прибора не исключают друг друга. Каждый из них должен в дальнейшем совершенствоваться и занять свое место при анализе искрения щеток и настройке коммутации. Общим в этих приборах и выгодно отличающим их от других является наличие особых блоков, производящих суммирование и усреднение воспринимаемых импульсов, благодаря чему показания пропорциональны как высотам импульсов и их продолжительности, так и количеству их в единицу времени, что позволяет более полно отмечать уровень искрения щеток.
Метод настройки коммутации Е. М. Синельникова и А. Г. Назикяна
Е. М. Синельников и А. Г. Назикян предложили новый метод настройки добавочных полюсов [Л. 8-3], сущность которого поясняет схема на рис. 8-6,а. Для проведения настройки добавочных полюсов по этой схеме поступают следующим образом: машины размагничивают и щетки устанавливают в нейтрали, после чего машину прогревают в соответствии с требованием ГОСТ. Как видно из приведенной схемы, исследуемый генератор Г1 замыкается на амперметр А1. Отключенные же обмотки добавочных полюсов и компенсационная подключаются к генератору Г2, ток которого, по заключению авторов этого метода, может составлять всего лишь 0,1—0,3 номинального.
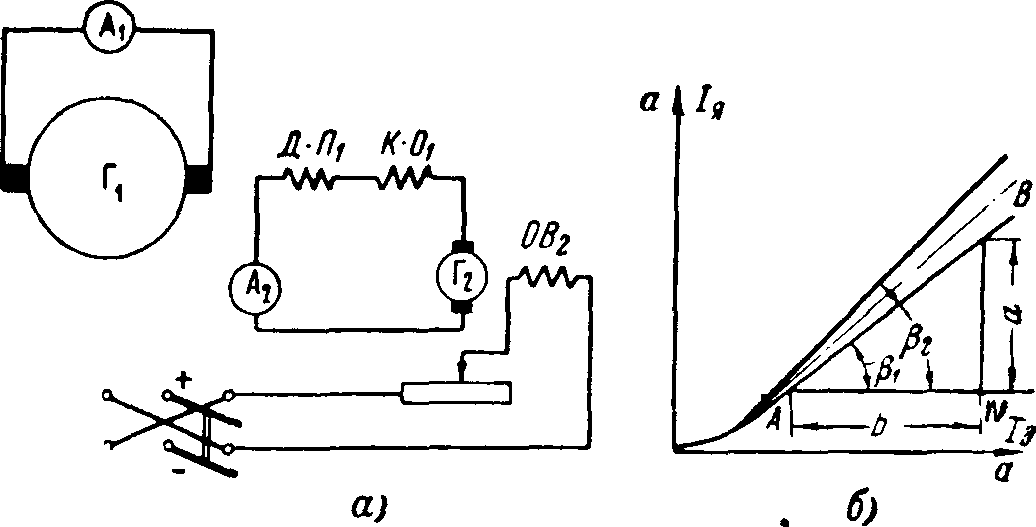
Рис. 8-6.
а—-схема для настройки коммутации по методу Е. М. Синельникова и А. Г. Назикяна; б —зависимость тока якоря /я от тока добавочных полюсов /дп, служащая для корректировки параметров добавочных полюсов.

Как показал опыт, при оптимальной настройке добавочных полюсов зависимость тока якоря Iя от тока добазочных полюсов представляется прямой линией, расположенной по отношению осей под углом 45°* (рис. 8-6,б). Если этот угол меньше, то коммутация будет замедленной, а если β>45°, то ускоренной.
* При одинаковом масштабе тока по обеим осям.
Почему именно ток якоря должен соответствовать току добавочных полюсов, можно установить из следующих суждений: представим себе размагниченную машину с идеальной обмоткой якоря, т. е. без активного и индуктивного сопротивлений, но с очень небольшим сопротивлением щеточного контакта для обеспечения прямолинейной коммутации. Если в такой машине, включенной по схеме на рис. 8-6,а, установить ток в обмотке добавочных полюсов, то ток ίк в коммутируемых секциях создает продольное поле машины, которое обеспечит в якорной обмотке ток, подчиняющийся условию![]() В реальных машинах сопротивления электрические и магнитные не равны нулю, поэтому всегда
В реальных машинах сопротивления электрические и магнитные не равны нулю, поэтому всегда![]() . Однако для каждой машины между этими м. д. с. в зависимости от ее параметров существует вполне определенное соотношение, а так как обмотки якоря и добавочных полюсов включаются последовательно, то это соотношение должно существовать между их витками. Именно этим и объясняется то обстоятельство, что при правильно выбранном числе витков обмотки возбуждения добавочных полюсов существует равенство между токами Iя и Iд.п.
. Однако для каждой машины между этими м. д. с. в зависимости от ее параметров существует вполне определенное соотношение, а так как обмотки якоря и добавочных полюсов включаются последовательно, то это соотношение должно существовать между их витками. Именно этим и объясняется то обстоятельство, что при правильно выбранном числе витков обмотки возбуждения добавочных полюсов существует равенство между токами Iя и Iд.п.
К числу недостатков этого метода следует отнести невозможность определения коммутационной устойчивости машины. Это тем более важно потому, что авторы предлагают проводить настройку коммутации при относительно малых токах. Известно, что даже при значительных токах искрение машины в режиме короткого замыкания не соответствует тому, что имеет место при полном напряжении, а если учесть, что здесь настройка коммутации ведется при токах (0,1—0,3)Iн, то станет совершенно ясным, что никакого суждения об искрении машины при этом опыте получить нельзя.
В дискуссии по этому вопросу на страницах журнала «Электромеханика» было высказано очень много сомнений и по другим вопросам. Например: отсутствие определенной зависимости от скорости вращения якоря; зависимость результатов настройки добавочных полюсов от тщательности размагничивания машины; правильность постановки щеточной траверсы; невозможность обнаружить насыщение в магнитной цепи и т. п.
Настройка коммутации по методу А. Я. Бергера
Настройка коммутации по данному методу проводится на основе реактивного треугольника, который определяется по характеристикам холостого хода и короткого замыкания либо по характеристикам холостого хода и нагрузочной (рис. 8-7).
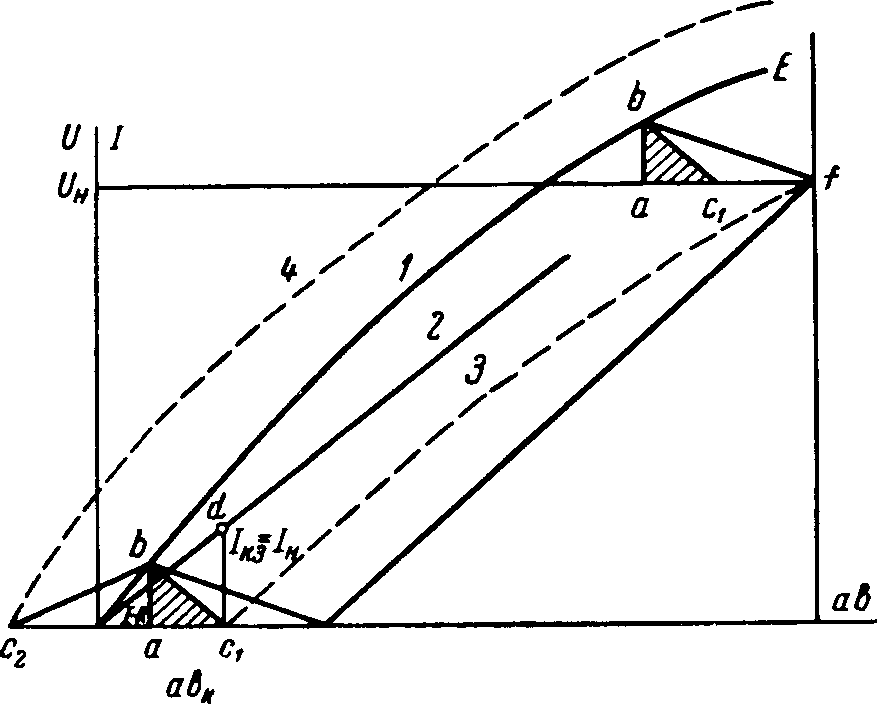
Рис. 8-7. Характеристика машины, служащей для корректировки добавочных полюсов по методу А. Я. Бергера.
Параметры добавочных полюсов корректируют по отрезку ас, который, по мнению автора данного метода, определяет лишь коммутационную реакцию якоря, в то время как отрезок af при нагрузке машины характеризует и поперечную реакцию якоря.
Коммутационная реакция якоря в зависимости от вида коммутации может быть размагничивающей (при недокомпенсации), ей будет соответствовать треугольник abc1, и намагничивающей (при перекомпенсации), определяемой треугольником abc2.
Для пересчета величины воздушного зазора для получения оптимальной коммутации А. Я. Бергер рекомендует следующую приближенную экспериментальную формулу:
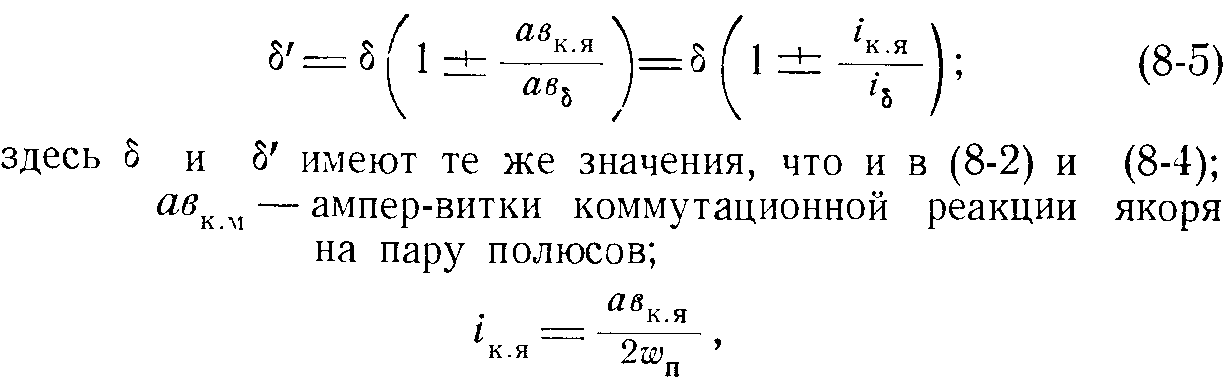
В (8-5) знак плюс берется для ускоренной коммутации, а минус для замедленной.