Глава 14
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
§ 9. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Производственные процессы, в том числе эксплуатация автоматизированного судна, связаны с многочисленными измерениями физических, большей частью неэлектрических величин.
До появления автоматических управляющих устройств и автоматизированных систем управления (АСУ) потребителем измерительной информации на выходе измерительных приборов был человек (штурман, механик, электромеханик и т. д.). Теперь же информацию от приборов можно не только наблюдать и регистрировать. Данные, поступающие непосредственно в автоматические управляющие устройства, используют в защите, регулировании и управлении. В этих условиях для измерения неэлектрических величин широко применяют электрические методы измерения благодаря достоинствам преобразователей (чувствительных датчиков), осуществляющих преобразования неэлектрических величин в электрические, и измерительной аппаратуры.
Преобразователи обладают большой точностью, быстродействием, достаточной простотой и надежностью, а электроизмерительная аппаратура — дополнительно широким диапазоном измеряемых величин. Кроме того, электрические величины — аналоги неэлектрических — можно легко передавать на значительные от объекта измерений расстояния одновременно в несколько пунктов. Электрические величины хорошо контролировать с помощью стрелочных и цифровых приборов, а также записывать с помощью самопишущих приборов или осциллографов. И, наконец, электрические величины могут быть введены в аналоговые и цифровые вычислительные машины и использованы для контроля, регулирования или управления объектами.

Рис. 27. Структурная схема электроприбора для измерения неэлектрических величин
Прибор для электрических измерений неэлектрических величин (рис. 27) состоит из преобразователя 1, измерительной цепи 2 и электроизмерительного прибора 3.
Преобразователь осуществляет преобразование входной неэлектрической величины х в электрическую величину у1. В измерительной цепи электрическая величина y1 преобразуется в другую электрическую величину у2, удобную для измерений в электроизмерительном приборе. Шкала прибора градуирована в единицах измерения измеряемой неэлектрической величины.
Преобразователи, в которых неэлектрические величины преобразуются в такие электрические параметры, как сопротивление, индуктивность, взаимная индуктивность и емкость, называются параметрическими, или пассивными. Приборы с параметрическими преобразователями требуют для своей работы вспомогательных источников питания. Преобразователи, в которых измеряемая неэлектрическая величину преобразуется в электроэнергию, называются генераторными, или активными. Для приборов с генераторными преобразователями вспомогательные источники питания необязательны.
Для преобразователей характерны следующие параметры: статическая характеристика — зависимость выходной величины у от входной х, описываемая аналитическим выражением или графиком y=f(x);
пределы изменений входных xmin—xman и выходных ymin—ymax величин;
чувствительность, или коэффициент усиления k=∆у/∆х, равный тангенсу наклона α касательной к статической характеристике;
порог чувствительности — наименьшее значение входной величины, способное вызвать изменение выходного сигнала;
постоянная времени — характеристика инерционных свойств преобразователя.
Измеряемые неэлектрические величины многообразны, однако достаточно измерения небольшого числа величин, а именно:
механических — сил и напряжений, действующих в деталях машин, механизмов и в металлических конструкциях стационарных и движущихся объектов (например, судов)перемещения (поступательного и вращательного) различных узлов, деталей и устройств (например, штурвалов, клапанов, задвижек, люков и т. д.); скорости движения, ускорения, амплитуды и частоты вибраций объектов, деталей и устройств; давления жидкости и газов в трубопроводах, котлах, резервуарах и других объектах;
тепловых, характеризующих температурный режим и состояние деталей, объектов и среды;
количественных — расхода количества веществ;
характеризующих состав и концентрацию веществ (например, наличие в них вредных или полезных примесей, в частности в воде, питающей котлы и охладители СЭУ, в смазочном масле, топливе и т. д.).
§ 10. РЕОСТАТНЫЕ, ИНДУКТИВНЫЕ И ЕМКОСТНЫЕ ДАТЧИКИ
Измерения линейных и угловых перемещений и некоторых других величин, которые могут быть механически преобразованы в линейные и угловые перемещения, наиболее распространены. В судовых условиях приборы для измерения перемещений применяют для наблюдения за положением различных заслонок, клапанов, для определения уровня жидкости, дистанционной передачи показаний и т. д. В схемах приборов для измерения перемещений используют реостатные, индуктивные и емкостные преобразователи (датчики).
Реостатным называется датчик, преобразующий какую-либо неэлектрическую величину х в активное сопротивление R, т. е. осуществляющий функцию преобразования R=f(x).
Реостатный датчик представляет собой реостат, подвижный контакт которого, перемещаясь по токоведущей части, занимает то или иное положение в зависимости от значения х. Каждому положению подвижного контакта соответствует определенное активное сопротивление между этим контактом и началом или концом токоведущей части реостата. Реостатные. датчики могут быть выполнены с поступательным перемещением подвижного контакта вдоль токоведущей части либо с вращательным движением подвижного контакта и с токоведущей частью в виде провода, намотанного на изогнутый каркас.
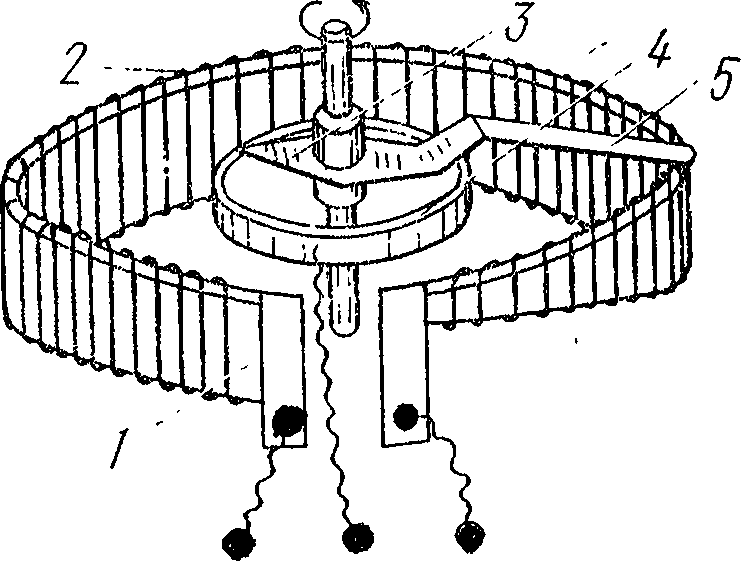
Рис. 28. Реостатный датчик
На каркас 1 из изоляционного материала (рис. 28) намотана с равномерным шагом проволока 2. На верхней грани каркаса изоляция проволоки зачищена и по металлу скользит щетка 5.

Рис. 29. Индуктивные датчики
Добавочная щетка 3 скользит по токосъемному кольцу 4. Материал каркаса — пластмасса, текстолит или алюминий, покрытый изоляционным лаком; материал провода — манганин, константан, у датчиков ответственного применения — сплав платины и иридия; контактирующую часть подвижного контакта делают из серебра, сплавов платины.
Реостат с подвижным контактом может служить потенциометрическим датчиком. В этом случае перемещения преобразуются в электрическое напряжение, т. е. u=f(x).
В некоторых случаях применяют функциональные датчики с нелинейным распределением сопротивления вдоль каркаса. Это достигается, например, изменением профиля каркаса, намоткой проволоки с переменным шагом, намоткой отдельных участков проводами разного диаметра или с разными удельными сопротивлениями.
Недостатками реостатных датчиков являются наличие некоторых трущихся контактов, а также определенные затраты энергии.
Индуктивным называется датчик, у которого под влиянием преобразуемой неэлектрической величины х изменяется индуктивность L, т. е. осуществляется преобразование L=f(x). По конструкции датчики весьма разнообразны.
При изменении величины воздушного зазора δ (рис. 29, а) или его площади (рис. 29, б) под действием некоторой механической величины (линейного перемещения, механической силы, давления) изменяется магнитное сопротивление магнитопровода, а значит, и индуктивность катушки, надетой на сердечник и включенной в цепь переменного тока. На рис. 30, например, показана зависимость индуктивности L от величины воздушного зазора δ, т. е. L=f(δ). Изменение индуктивности приводит к изменению индуктивного сопротивления xl=ωL катушки, а соответственно и тока в цепи, в которую включена катушка. Таким образом, ток в цепи катушки в первом случае зависит от величины воздушного зазора, а во втором — от его площади. Датчики с изменением величины воздушного зазора применяют при измерении перемещений сердечника 0,01—10 мм, а с изменением площади — при измерении перемещений 5—20 мм.

Рис. 30. Кривая зависимости индуктивности от воздушного зазора магнитопровода
Преобразователь с разомкнутой магнитной цепью (рис. 29, в) представляет собой катушку, внутри которой помещен ферромагнитный сердечник. Перемещение сердечника влияет на индуктивность катушки. Этот тип датчика, называемого соленоидным, применяют для измерения значительных перемещений сердечника (10—100 мм).
Для измерения угловых перемещений можно применять преобразователь (рис. 29, г) с магнитопроводом, в воздушном зазоре которого помещен электропроводный диск из меди или алюминия. Индуктированные в диске токи оказывают размагничивающее действие и изменяют магнитное сопротивление магнитопровода и индуктивность катушки. Таким образом, ток в катушке зависит от положения диска. Изменяя профиль диска, можно получить любой вид зависимости индуктивности от угла поворота. Датчики такого типа используют для измерения угловых перемещений от 0 до 180 или 360°.
Как видно из рис. 30, зависимость L=f(δ) для датчика с изменением воздушного зазора нелинейна. Увеличить линейный участок характеристики и уменьшить погрешность позволяют дифференциальные преобразователи. Практически все индуктивные датчики являются дифференциальными.
На рис. 31,а показан дифференциальный датчик с изменением воздушного зазора. При Р=0 якорь магнитопровода расположен симметрично относительно обоих сердечников, индуктивные сопротивления обеих катушек одинаковы. Ток в измерительной диагонали моста может быть с известным приближением записан; следующим образом:
(14)

Рис. 31. Дифференциальный индуктивный датчик


Рис. 32. Емкостные датчики
Сравнительная простота, высокая точность, малое потребление энергии, возможность построения бесконтактных схем приборов предопределили широкое распространение индуктивных датчиков.
Емкостным называется датчик, который преобразует неэлектрическую величину х в электрическую емкость конденсатора С, т. е. осуществляющий функцию преобразования C=f(x).
Электрическая емкость С плоского конденсатора с двумя токоведущими плоскостями, имеющими поверхность S и расположенными параллельно на расстоянии δ, равна ![]() (15) где εα — диэлектрическая проницаемость среды, находящейся между плоскостями.
(15) где εα — диэлектрическая проницаемость среды, находящейся между плоскостями.
Таким образом, для осуществления функции преобразования C=f(x) неэлектрическая величина х должна воздействовать на активную площадь S электродов, диэлектрическую проницаемость εα или расстояние δ между пластинами.
Конструкций емкостных датчиков много, В качестве Примера рассмотрим два из них.
На рис. 32, а показано устройство емкостного преобразователя с переменной площадью пластин. Выбором формы подвижной 1 и неподвижной 2 пластин можно получить необходимую функциональную зависимость между изменением емкости и входным угловым или линейным перемещением. Датчики с переменной площадью применяют для измерения перемещений, больших 1 мм.
Емкостный датчик уровня (рис. 32, б) Состоит из двух параллельно соединенных конденсаторов. Один из них емкостью С1 образован частью электродов и диэлектриком — жидкостью, уровень которой измеряется. Другой конденсатор емкостью С2 образован остальной частью этих же электродов и диэлектриком — воздухом. Емкость датчика

где r1, r2 — радиусы внешнего и внутреннего цилиндров, l1 — длина, на которую цилиндр заполнен жидкостью; l0 — полная
длина цилиндра; εα — диэлектрическая проницаемость жидкости; ε0 — диэлектрическая постоянная.
При изменении уровня жидкости (или сыпучего, вещества) изменяются соотношение между величинами![]() и соответственно емкость системы.
и соответственно емкость системы.
Емкости большинства датчиков составляют 10—100 пФ, поэтому даже при очень высоких частотах f переменного тока их электрическое сопротивление![]() велико (103—107 Ом), а выходная мощность настолько мала, что необходим дополнительный усилитель. По этим причинам, а также по соображениям безопасности труда емкостные датчики не нашли пока широкого применения на судах.
велико (103—107 Ом), а выходная мощность настолько мала, что необходим дополнительный усилитель. По этим причинам, а также по соображениям безопасности труда емкостные датчики не нашли пока широкого применения на судах.
§ 11. ТЕНЗОРЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Тензорезистивными преобразователями, или тензорезисторами, называются резистивные преобразователи, в основе работы которых лежит явление тензоэффекта, т. е. изменение активного сопротивления проводников при их механической деформации (растяжении, сжатии и т. д.).
Основным материалом тензорезисторов является тонкая металлическая проволока или фольга. При их деформации изменяются одновременно длина l, сечение S и удельное сопротивление р, а следовательно, и электрическое сопротивление R.
Тензоэффект характеризуется коэффициентом относительной тензочувствительности:
![]() (17) где
(17) где![]() — относительное изменение сопротивления проводника;
— относительное изменение сопротивления проводника;![]() — относительное изменение длины проводника.
— относительное изменение длины проводника.
Значения коэффициента тензочувствительности для большинства металлов должны быть 1,48—1,8, однако для различных материалов (по данным экспериментов) они выходят за указанные пределы. Это связано с тем, что при деформации проводника, помимо изменения его геометрических размеров, изменяются и физические свойства, в частности удельное сопротивление р. Практически величина k равна 0,5—4.
Относительное изменение сопротивления металлических тензорезисторов находится в пределах (1,25—10) 10-3, т. е. не превышает 1% сопротивления недеформированного тензорезистора. Поэтому для тензорезисторов следует применять металлы, электрическое сопротивление которых минимально зависит от других факторов (температуры, времени и т.п.). К таким материалам прежде всего относятся: константан, имеющий сравнительно высокий коэффициент тензочувствительности (k—2), малый температурный коэффициент сопротивления (α=5·10-5 1/°С), высокое удельное сопротивление (р=0,5 Ом-мм2/м) и высокое постоянство характеристик во времени; манганин, у которого α и ρ находятся в этих же пределах, но коэффициент тензочувствительности значительно ниже (k=0,5). В последнее время все чаще применяют тензорезисторы, изготавливаемые из полупроводникового материала — германия, кремния и т.п. Они обладают большим коэффициентом тензочувствительности (от —200 до —850), малыми размерами (несколько миллиметров), способны работать при температуре до +250°С, но имеют существенный недостаток — недостаточную механическую прочность.
Конструкции тензорезисторов весьма разнообразны. В манометрах для измерения высоких и сверхвысоких давлений использован тензоэффект проводника, находящегося в состоянии объемного сжатия. Тензодатчик, представляющий собой катушку провода из манганина, или полупроводниковый элемент, помещают в область измеряемого давления (жидкости или газа). Выходная величина такого преобразователя — его активное сопротивление.
Для измерения деформации деталей машин, механизмов и элементов металлических конструкций, а также механических напряжений и сил, вызывающих эти деформации,, применяют проволочные, фольговые и пленочные тензопреобразователи.
Устройство проволочного тензорезистора и крепление его к исследуемой детали показаны на рис. 33, а. Уложенную зигзагообразно тонкую (диаметром 0,02—0,05 мм) константановую проволоку 1 наклеивают на полоску 2 лакоткани или бумаги, называемую подложкой. К концам проволоки присоединяют (сваркой или пайкой) выводные медные проводники 3. Сверху тензодатчик покрывают слоем 4 лака или лакоткани, закрепляющим положение витков проволоки. Для измерения деформации тензодатчик приклеивают клеями 5 типа к исследуемой конструкции 6 (например, к обшивке, балкам, шпангоутам или другим деталям судна). Входной величиной тензопреобразователя является деформация поверхностного слоя детали, выходной — сопротивление преобразователя, пропорциональное этой деформации.

Рис. 33. Проволочный тензодатчик
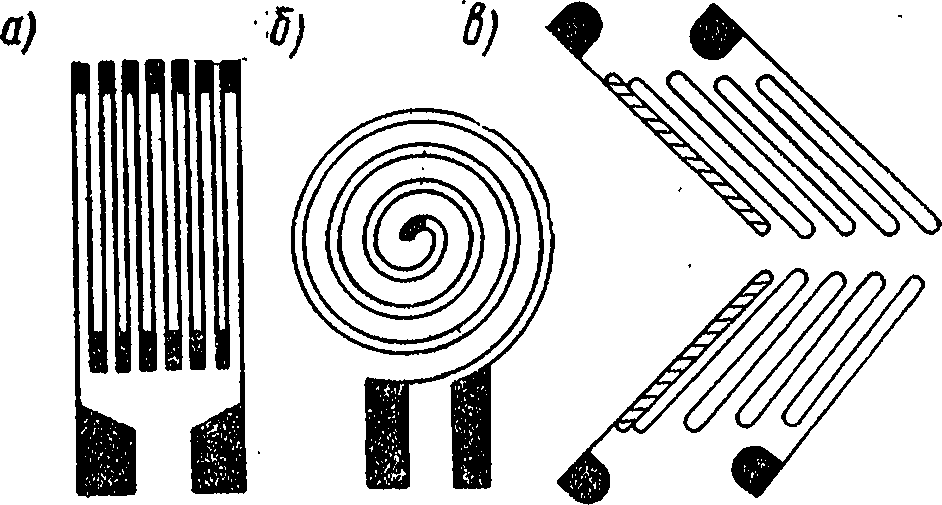
Рис. 34. Фольговые тензодатчики
Проволочные тензодатчики имеют форму прямоугольника со сторонами l=8-15 мм и α=3-10 мм. Сопротивление таких резисторов — около 100 Ом. Бывают тензодатчики и меньших размеров (l=2,5 мм; а=1 мм).
Проволочный тензодатчик включают в одно из плеч моста (рис. 33, б). При отсутствии деформаций мост уравновешен, а при их наличии изменение сопротивления тензодатчика вызовет появление тока в диагонали моста, что может быть воспринято гальванометром или вибратором осциллографа, осуществляющего запись исследуемого процесса. Для уменьшения температурной погрешности в соседнее плечо моста может быть включен такой же датчик, помещенный в те же температурные условия, но не деформируемый.
Проволочные тензодатчики применяют для измерения относительных деформаций величиной 0,005—2%.
Фольговые тензодатчики представляют собой очень тонкую (толщиной 0,004—0,012 мм) ленту из фольги, на которой часть металла выбирают травлением, а оставшаяся часть образует решетку с выводами (рис. 34). Такие преобразователи по сравнению с проволочными имеют большую поверхность соприкосновения с исследуемой деталью. При изготовлении фольговых датчиков можно выбрать любой рисунок решетки. На рис. 34, а показан преобразователь для измерения линейных напряжений, на рис. 34, б — для мембран манометров, а на рис. 34, в — для измерения крутящих моментов.
Пленочные тензорезисторы получают с помощью вакуумной возгонки тензочувствительного материала и последующей его конденсации на подложку. В качестве материала можно использовать как металлы, так и полупроводники. Пленочные тензопреобразователи из титано-алюминиевого сплава 48Т-2 обеспечивают измерение относительной деформации до 12%.