§ 59. УПРАВЛЕНИЕ РУЛЕВЫМ ЭЛЕКТРОПРИВОДОМ. АВТОРУЛЕВОЙ
Сложность управления рулевым электроприводом во многом зависит от типа передачи.
При секторной передаче система управления должна обеспечивать частые пуски, реверсирование и регулирование частоты вращения электродвигателя. В этом случае двигатель, как уже отмечалось, должен выдерживать режим стоянки под током в течение 1 мин. Такая ситуация возникает, например, при работе судна во льдах.
При гидравлической передаче с насосами переменной подачи двигатель, вращающий насосы, работает непрерывно с постоянной частотой вращения и не реверсируется. Система управления обеспечивает пуск и остановку двигателя. Перекладка же руля осуществляется изменением подачи насоса и направления движения жидкости (масла) самим насосом.
Режим работы двигателя при секторной передаче значительно тяжелее, чем при гидравлической.

Рис. 144. Схема управления электроприводом насосов рулевой машины
На рис. 144 показана для примера одна из возможных схем управления электродвигателями насосов переменной подачи электрогидравлической рулевой машины.
Питание на схему подается по двум кабельным линиям, причем одна из них подключена непосредственно на шины ГРЩ, а другая — на шины АРЩ. Контакторы КП1 и КП2 обеспечивают автоматическое переключение с одной линии на другую в случае исчезновения напряжения на одном из питающих кабелей.
Пуск любого двигателя можно осуществлять из румпельного помещения, установив для этого переключатель пуска ПП1 или ПП2 в положение М (местный пуск) или из рулевой рубки, установив переключатель в положение Д (дистанционный пуск).
При дистанционном включении схема предусматривает работу любого двигателя и обоих вместе. Если переключатель насосов ПН перевести в положение ЛБ1, то через контакт К1 получает питание катушка контактора Л1, который, сработав, подключает к сети двигатель Ml насоса левого борта. То же происходит при установке переключателя ПН в положение ЛБ2, однако в этом случае при отключении по какой-либо причине контактора Л1 автоматически включится в работу двигатель м2 насоса правого борта. Отключение контактора Л1 вызовет замыкание его контакта в цепи катушки контактора Л2, которая получит питание через 'контакт К5 переключателя насосов ПН.
При установке переключателя в положения 1 и 2 ПБ схема работает аналогично, но двигатели M1 и м2 меняются ролями. В положениях ЛБ3 и ПБ3 включаются оба двигателя.
При перегрузке любого двигателя срабатывают тепловые реле РТ1 или РТ2, которые своими контактами размыкают цепь катушек реле Р3 или Р4. Реле Р3 или Р4 отключается и замыкает свой контакт в цепи катушки реле времени РВ1 или РВ2. Реле времени, цепь питания которого проходит через собственный размыкающий контакт, будет работать в прерывистом режиме, что приведет к миганию сигнальной лампы ЛС1 или ЛС2. Кроме того, реле Р3 или Р4 замкнет своим контактом цепь звонка Зв. Звуковой сигнал можно прекратить нажатием кнопки КБ, но световой сигнал останется до тех пор, пока не исчезнет перегрузка двигателя.
Световой и звуковой сигналы подаются и в том случае, когда один из двигателей отключился, а другой включился автоматически, т. е. когда переключатель ПН находится в положении ЛБ2 или ПБ2. Например, переключатель ПН находился в положении ПБ2, работал двигатель м2 и контактор Л2 по какой- либо причине отключился. Срабатывают контактор Л1 и реле Р1. В работу включается двигатель M1. Контакты Л1 и Р1 замыкают цепь сигнальной лампы ЛС3 и звонка Зв. В этом случае звонок также можно выключить при помощи кнопки КБ и реле Р5.
Электропривод по системе Г—Д наиболее полно отвечает требованиям, предъявляемым к рулевым электроприводам с секторной передачей.

Рис. 145. Схема включения обмотки возбуждения генератора системы Г—Д для создания следящего рулевого электропривода
Он широко распространен на практике.
Принцип получения рулевого электропривода следящего действия поясняется рис. 145, на котором показана схема включения обмотки возбуждения генератора ОВГ электропривода системы Г—Д (см. рис. 115).
Катушки реверсивных контакторов П (вправо) и Л (влево) получают питание через контактные полукольца ПК в зависимости от поворота выходной осью механического дифференциала Д, контактного ролика на то или иное полукольцо. Одна входная ось дифференциала поворачивается штурвалом поста управления, а другая — ротором сельсина-приемника СП обратной связи.
Исходное положение схемы: штурвал ПУ в нейтральном положении, руль в диаметральной плоскости, ролик на изоляционном промежутке, контакторы П и Л отключены, генератор не возбужден, ИД не вращается.
При переводе поста управления, например, на 10° вправо замыкается цепь катушки контактора П, который, сработав, подключает обмотку возбуждения генератора ОВГ. Генератор возбуждается, и исполнительный двигатель начинает перекладывать руль вправо. По мере перекладки руля поворачиваются и роторы СД и СП на такой же угол, а контактный ролик через дифференциал возвращается на изоляционный промежуток. Когда руль повернется на 10°, ролик разомкнет цепь катушки контактора П и ИД остановится. Генератор в процессе всей перекладки получает полное возбуждение.
В рулевых электроприводах с гидравлической передачей систему Г—Д применяют для изменения подачи насосов и направления движения жидкости. Однако в этом случае система маломощная (обычно мощность ИД менее 1 кВт, а в качестве генератора часто используют ЭМУ).
Авторулевые.
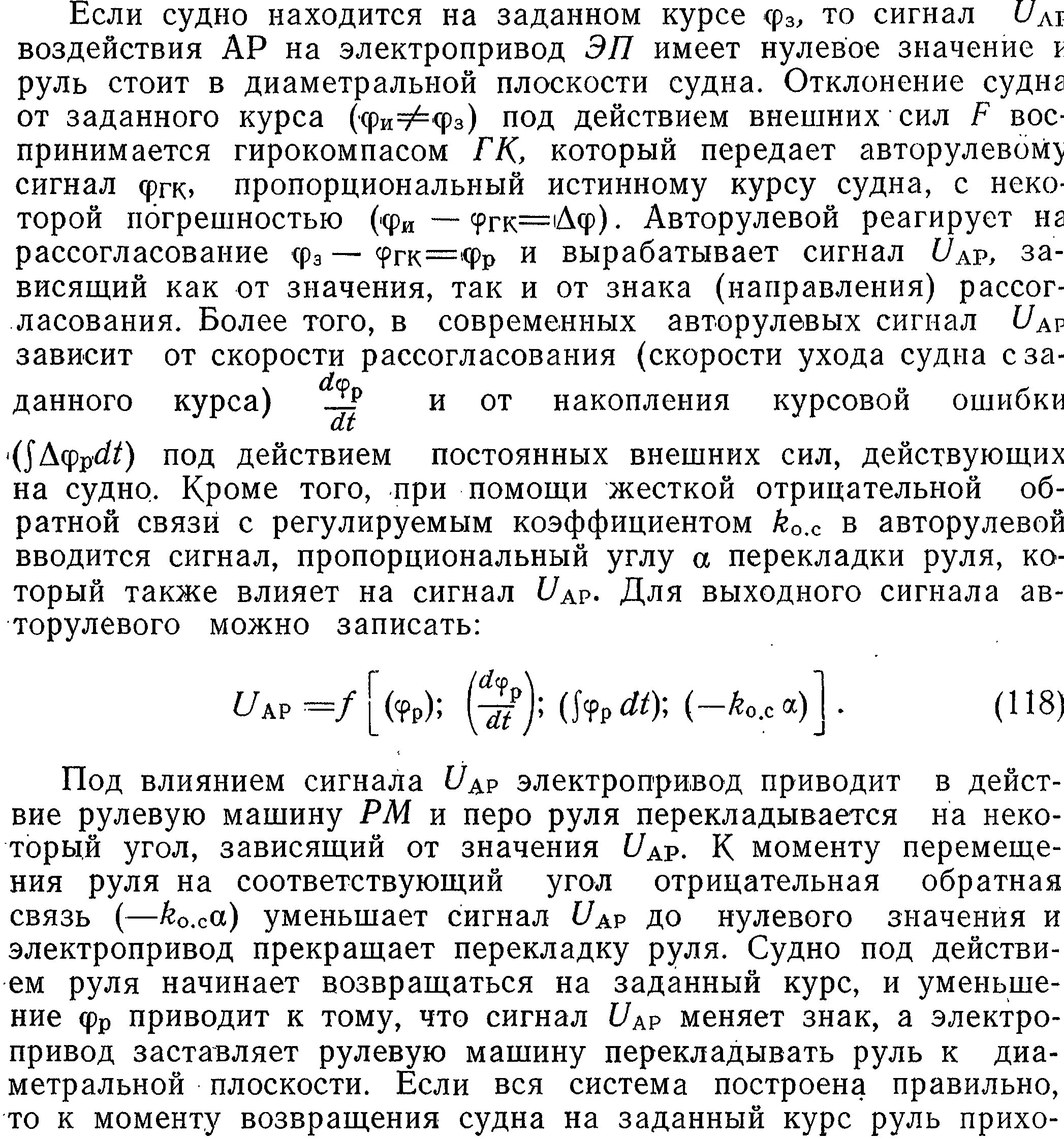
Все современные суда оборудуют авторулевыми (АР). Авторулевой автоматически управляет курсом судна, а точнее, стабилизирует (удерживает) судно на заданном курсе посредством электропривода рулевой машины. Роль и место авторулевого в системе стабилизации судна на курсе поясняются функциональной схемой (рис. 146). Здесь механические связи показаны двумя линиями, а электрические — одной.

На судах морского флота применяют авторулевые как отечественного, так и зарубежного производства. Наиболее распространены отечественные авторулевые АБР, АР, АТР, АРМ, которые различаются числом и видом настроечных параметров и параметров, входящих в закон регулирования, элементной базой, степенью унификации по отношению к рулевым электроприводам и пр.
Для повышения качества систем управления курсом судна и сокращения их модификаций разработана унифицированная система управления «Аист» для всего типизированного ряда отечественных электрогидравлических машин, о которых говорилось в предыдущем параграфе. При разработке системы «Аист» ставились задачи увеличения ее ресурса до 40 тыс. ч и времени непрерывной работы до 2 тыс. ч, улучшения эстетического вида и условий эксплуатации и ремонта.

Рис. 146. Структурная схема стабилизации судна на заданном курсе
Рис. 147. Структурная схема авторулевого