Глава VI
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ЭЛЕКТРОСТАНЦИЯМИ
§ 40. ОБЩИЕ СВЕДЕНИЯ
Все современные суда в зависимости от степени автоматизации энергетической установки делят на две группы. К первой группе относятся суда без постоянной вахты в машинном отделении и в ЦПУ. Регистр СССР присваивает этим судам знак автоматизации А1. Для краткости их иногда называют судами с безвахтенным обслуживанием машинного отделения. Ко второй группе относятся суда без постоянной вахты в машинном отделении, но с постоянной вахтой в ЦПУ. Регистр СССР присваивает им знак автоматизации А2. Иногда их называют судами с периодическим обслуживанием машинного отделения. Суда старой постройки, находящиеся в эксплуатации, не имеют в символе класса знака автоматизации.
Главный вопрос, возникающий при проектировании современных судов, состоит в том, что и в какой степени следует автоматизировать, чтобы можно было осуществлять безвахтенное или периодическое обслуживание СЭУ. При ответе на этот вопрос необходимо иметь в виду, что на подавляющем большинстве судов энергетическая установка состоит из двух частей: главной, обеспечивающей движение судну, и вспомогательной, обеспечивающей судно электроэнергией. Создание судов с единой энергетической установкой, как уже отмечалось (см. § 29), представляет немалые трудности.
Основу автоматизации главной энергетической установки составляет система ДАУ с мостика главными двигателями или ВРШ. Система ДАУ главным двигателем обычно решает следующие задачи: пуск, реверс, остановку, разгон двигателя по мере разгона судна (свободный ход) или разгон двигателя при маневрировании судна, а также аварийный разгон и регулирование частоты вращения гребного винта.
Все соответствующие команды подаются с датчика дистанционного управления, расположенного на мостике. Исполнительными элементами, которые приводят в действие различные органы управления главного двигателя, являются электромеханические устройства (электромагниты, электродвигатели), пневматические или гидравлические, называемые сервоприводом.
Дистанционным датчиком управления лишь задается та или иная из перечисленных команд; выполнение же ее осуществляется системой ДАУ автоматически по определенной программе. При этом контролируется возможность перегрузки главного двигателя и исправность отдельных узлов системы ДАУ. Например, программа предусматривает разгон двигателя при свободном ходе судна за 15—20 мин, но если при этом будет происходить перегрузка дизеля, то время разгона может увеличиваться до двух-, трехкратного значения. Подробно системы ДАУ главными двигателями и ВРШ изучаются в других дисциплинах.
Автоматизация главной энергетической установки, кроме системы ДАУ, предусматривает дистанционные пуск и остановку из ЦПУ вспомогательных механизмов, обслуживающих главные двигатели, автоматический пуск резервного масляного насоса при понижении давления в системе смазки, дистанционное или автоматическое пополнение баллонов пускового воздуха и воздуха для питания средств автоматизации, автоматический пуск резервного насоса питания гидравлических устройств автоматизации при понижении давления, автоматическое регулирование температуры воды, масла и топлива на входе в двигатель, в расходных цистернах и при сепарировании. На судах со знаком автоматизации А1 предусматривается автоматический ввод в действие всех резервных вспомогательных механизмов, связанных с ходом судна, при выходе из строя основных. Энергетическая установка автоматизированного судна оборудуется системой централизованного контроля параметров и аварийно-предупредительной сигнализацией, о чем подробнее пойдет речь в гл. X.
В соответствии с требованиями Регистра СССР суда со знаком А1 должны быть оборудованы системами и устройствами автоматизации таким образом и в таком объеме, чтобы при утрате знака А1 могли нормально эксплуатироваться, как суда со знаком А2, а при утрате знака А2 — как суда без знака в символе класса.
В настоящей главе рассматривается автоматизация вспомогательной энергетической установки, т. е. судовой электростанции.
Автоматизация управления СЭС включает следующие автоматические процессы и операции; стабилизацию напряжения и частоты тока на шинах ГРЩ; синхронизацию генераторов при подключении их к шинам ГРЩ; распределение активных и реактивных нагрузок между параллельно работающими генераторами; пуск резервного генераторного агрегата, когда нагрузка работающих генераторов достигает установленного значения; вывод из работы резервного генераторного агрегата, когда нагрузка работающих генераторов снижается до установленного значения; пуск аварийного дизель-генератора при исчезновении напряжения на шинах ГРЩ.

Рис. 98. Структурная схема автоматизации СЭС
Кроме того, к автоматическим процессам относятся защита генераторов от перегрузки путем отключения второстепенных потребителей и контроль состояния всей СЭЭС, в том числе контроль состояния изоляции (см. гл. 5).
Для автоматизации процессов управления СЭС промышленность выпускает унифицированные функциональные устройства, основу которых составляют полупроводниковые и релейные приборы и логические элементы (см. раздел I). Здесь в качестве примера рассмотрим в общем виде автоматизацию СЭС судов типа теплоход «Варнемюнде», построенных для Советского Союза в ГДР. Выбранный пример, по нашему мнению, достаточно полно раскрывает возможные объем и степень автоматизации, характерные для современных судов.
На рис. 98 приведена структурная схема СЭС, поясняющая взаимосвязь и назначение функциональных устройств автоматики. На схеме показаны общие для всей станции устройства (БПА, УКН, ПРУ, ОВП, ПП, УАО) и устройства, относящиеся только к одному, в данном случае второму генераторному агрегату (УЗГА, УСЧН, УПОД, АРН). Понятно, что такие же устройства имеет и каждый из остальных трех дизель-генераторов, но они не показаны на схеме.
Устройство синхронизации, регулирования частоты тока и распределения активной нагрузки УСЧН (см. рис., 98) объединяет три функциональных блока, которые на судах других серий выполнены в виде отдельных самостоятельных устройств. УСЧН осуществляет автоматическую синхронизацию генератора, включаемого на параллельную работу, автоматически регулирует частоту тока и распределяет активную нагрузку между параллельно работающими генераторами. Как будет показано в последующих параграфах, общим для всех трех операций является необходимость изменения вращающего момента первичного двигателя, т. е. изменения подачи топлива, что и осуществляется воздействием на серводвигатель СД. УСЧН включает в себя датчик частоты тока и датчик активного тока. С выхода УСЧН поступают сигналы: уменьшить или увеличить подачу топлива, включить автоматический выключатель АВ генератора, «неудавшаяся синхронизация», частота тока ниже 0,9 f. Первые два сигнала подаются на СД, третий — на привод включения АВ, четвертый — в УПОД, пятый — в УКН.
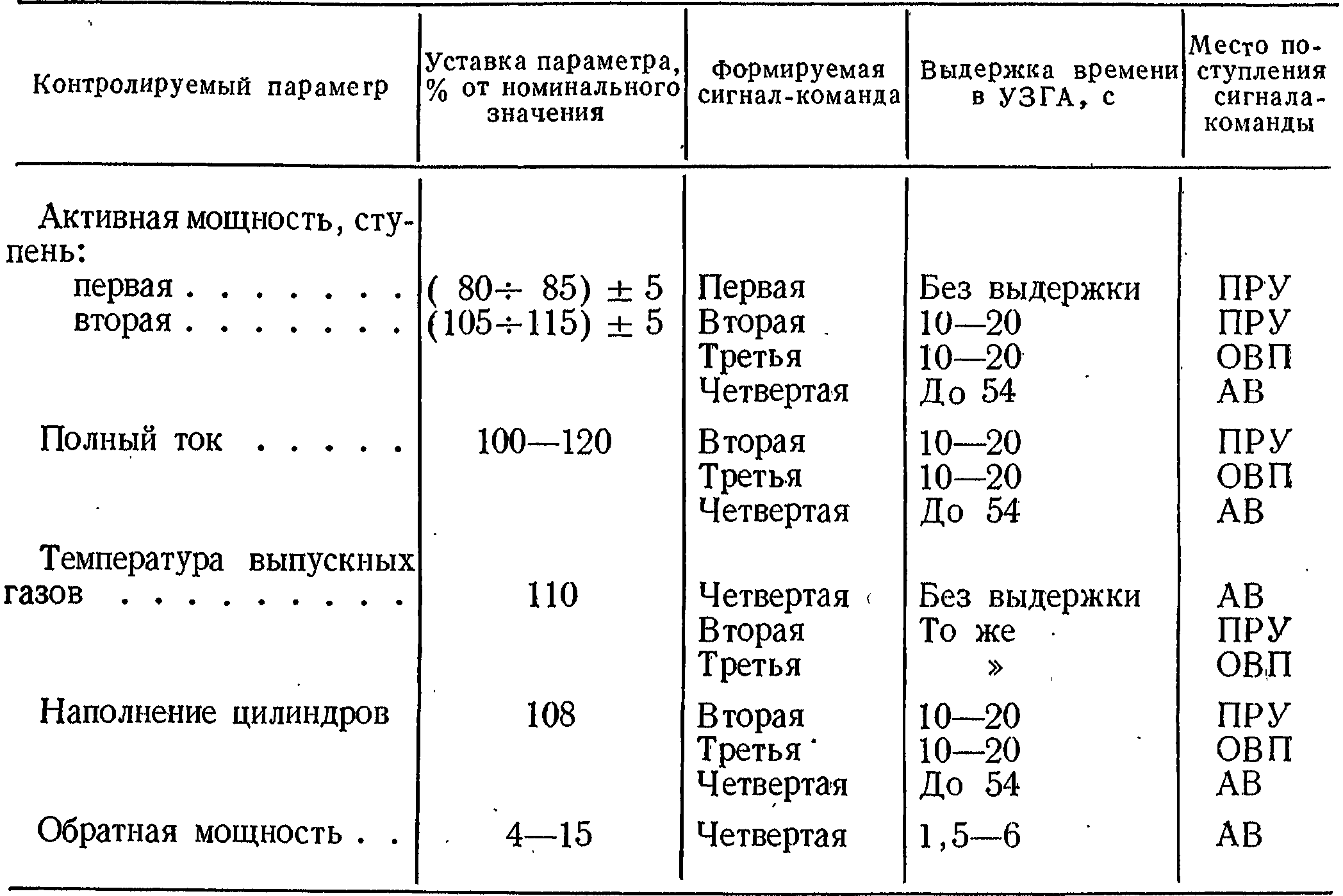
Устройство защиты генераторного агрегата УЗГА (см. рис. 98) осуществляет контроль нагрузки генератора и дизеля и защиту дизель-генератора от перегрузки и обратной мощности. Перегрузку дизель-генератора в зависимости от ее характера можно снять отключением второстепенных потребителей ОВП, пуском резервного ДГ, отключением перегруженного ДГ и заменой его резервным. При переходе генератора в двигательный режим отключается генераторный АВ. Контроль нагрузки ДГ осуществляется по активной мощности и полному току генератора, а также по температуре выпускных газов и степени наполнения топливом цилиндров дизеля;.
В трех выходных каналах УЗГА могут быть сформированы следующие сигналы-команды: пуск резервного ДГ с большой выдержкой времени, которая создается в ПРУ; пуск резервного ДГ с малой выдержкой времени, которая создается в УЗГА и ПРУ; отключение второстепенных потребителей; отключение АВ и остановка дизеля.
Функции, выполняемые УЗГА, удобно пояснить табл. 8, где указаны уставки параметров, на которые реагирует устройство, вырабатываемые сигналы-команды и их направление для последующей реализации.
Устройство контроля снижения нагрузки УКН (см. рис. 98) генераторных агрегатов следит за уменьшением нагрузки у работающих ДГ, и если она становится ниже установленного значения, то подает сигнал-команду с выдержкой времени (3—30 мин) на отключение одного из генераторов и остановку дизеля. Кроме того, устройство производит сравнение резерва мощности работающих генераторов с мощностью запускаемых потребителей и при необходимости дает сигнал на пуск резервного ДГ, задерживая (блокируя) до тех пор включение соответствующего потребителя. И наконец, если частота тока сети снижается ниже 0,9 fн, то устройство вырабатывает сигнал-команду на замену базового генератора. О роли базового генератора будет подробно сказано в §43.
Таблица 8
Здесь отметим лишь, что при параллельной работе нескольких ДГ один из них является ведущим (базовым) и на него возлагается задача стабилизации частоты тока. Поэтому если по каким-либо причинам частота тока становится ниже 0,9 fн и сигнал с УДН поступает на устройство автоматического отключения УАО базового генератора, которым может быть, например, первый из включенных на параллельную работу. Такая же ситуация возникает при снижении, напряжения сети ниже 0,8 Vн.
Программное устройство ПРУ (см. рис. 98) выполняет следующие функции: принимает и обрабатывает информацию о режимах работы СЭС и состоянии механического и электрического оборудования станции; производит выбор включаемого и отключаемого генераторов в соответствии с текущей информацией и заданной программой; формирует сигналы-команды пуска или остановки ДГ в соответствии со степенью загрузки СЭС; производит автоматическую замену неисправного ДГ на резервный; вырабатывает сигналы-команды на периодическое прокачивание масляных систем резервных ДГ.
Очередность ввода в работу и вывода из работы резервных ДГ устанавливается программным переключателем ПП, который имеет четыре положения и соответственно четыре программы (комбинации) из набора номеров ДГ.
Устройство пуска и остановки дизеля УПОД (см. рис. 98) является, по существу, системой ДАУ первичного двигателя (ПД) генератора. Оно выполняет следующие операции: готовит дизель к
пуску, обезвоживая трубопровод пускового воздуха и прокачивая смазочное масло; пускает дизель, подавая питание на электромагниты пусковых систем и подмагничивая генератор от аккумуляторной батареи АБ; контролирует пусковой процесс и дает информацию о нем в ПРУ; блокирует (прекращает) предпусковые и пусковые операции после удавшегося или неудавшегося пуска; формирует сигнал-команду на включение в работу УСЧН и контролирует ее выполнение; контролирует параметры, характеризующие режим работы дизеля и включенное состояние АВ; останавливает дизель по одной из трех программ — с большой или малой выдержкой времени и экстренно.
При неудавшейся попытке пуска дизеля автоматически с перерывами 6 с делаются еще две попытки, после чего вырабатывается информация «неудавшийся трехкратный пуск», которая поступает в ПРУ и появляется на табло.
УПОД воздействует на исполнительные органы (электромагниты) пусковых систем дизеля посредством контакторного устройства ДУ, состоящего из нескольких контакторов и реле.
В состав УПОД входит контрольно-измерительная система на 12 контрольных точек (входов), основу которой составляют датчики контролируемых параметров: температуры охлаждающей воды и масла, давления масла, частоты вращения ДГ, характера протекания пускового процесса, включенного состояния АВ. Одним из датчиков является тахогенератор ТГ дизеля.
Блок питания устройства автоматики БПА (см. рис. 98) служит для преобразования напряжения сети в напряжения, необходимые для питания логических полупроводниковых и релейных элементов функциональных устройств.
Автоматические регуляторы напряжения АРН (см. рис. 98) осуществляют стабилизацию напряжения генераторов. В данном варианте автоматизации энергетической системы АРН функционально не связаны с остальными устройствами автоматики,. В других системах такая связь может быть.
В последующих параграфах этой главы будут рассмотрены некоторые процессы и устройства, составляющие основу автоматизации СЭС. Понятно, что изучать автоматизированные процессы можно лишь тогда, когда хорошо представляешь, как они осуществляются вручную. Для этого в дальнейшем прежде всего будут рассматриваться физические явления, сопутствующие выполнению той или иной операции. Автоматизация же их будет представлена только на блочно-функциональном уровне. Исключение составляет автоматическая стабилизация напряжения, которая рассмотрена на уровне Принципиальных схем.
Общая картина задач автоматизации СЭУ, кратко представленная здесь, показывает, что они достаточно многообразны и технически сложны. Если сюда еще добавить задачи, связанные с оптимизацией процессов, протекающих в энергетической установке, информационно-измерительные проблемы, задачи судовождения, оптимальной загрузки судна и экономических расчетов, то станет понятно, что комплексное их решение возможно лишь с применением на судне ЭВМ. Вопрос лишь в том, что лучше: использовать единый общесудовой вычислительно-управляющий комплекс или идти по пути децентрализованных систем с применением нескольких специализированных ЭВМ. Есть немало доводов в пользу обоих направлений. В мировом флоте уже существует много судов с ЭВМ. Опыт их эксплуатации и должен дать окончательный ответ на поставленный вопрос.