Г л а в a IV
ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИЗАЦИИ
§ 20. ОБЩИЕ СВЕДЕНИЯ
Исполнительными элементами или серводвигателями называются устройства, предназначенные для перемещения регулирующего органа в системах автоматического регулирования, дистанционного управления или в следящих системах. Исполнительный элемент, получив сигнал от задающего элемента непосредственно или через усилитель, управляет органом, регулирующим подвод энергии или какой-либо среды в механизм или агрегат с целью изменения какого-то параметра или, наоборот, для поддержания его на необходимом уровне. В качестве регулирующего органа может служить, например, клапан, задвижка, затвор, реостат и др.
В зависимости от вида используемой энергии исполнительные элементы могут быть электрическими, пневматическими и гидравлическими. Их широко применяют в системах автоматики на судах.
Исполнительные электрические элементы преобразуют подводимый к ним электрический сигнал (напряжение управления) в частоту вращения или в перемещение вала. В качестве исполнительных элементов применяют двигатели постоянного тока с независимым возбуждением, двухфазные асинхронные, совмещенные асинхронные двигатели (усилители), синхронные шаговые двигатели, бесконтактные двигатели постоянного тока, электромагнитные муфты, электромагниты и др.
Область применения каждого серводвигателя определяется особенностями судовых систем автоматического регулирования и управления, их назначением, условиями, работы и требованиями, предъявляемыми к двигателям как элементам схем. При этом следует учитывать, что в отличие от двигателей общего применения серводвигатели в системах автоматического регулирования и управления используют практически в течение всего времени в динамическом режиме при непрерывно изменяющихся частоте и направлении вращения.
Основными требованиями, предъявляемыми к электрическим серводвигателям, являются: линейная зависимость частоты вращения ротора от электрического сигнала управления и широкий диапазон регулирования частоты вращения; статическая устойчивость и линейность механических характеристик во всем диапазоне частоты вращения; отсутствие самохода, т. е. вращения ротора и вращающего момента при снятом сигнале управления; стабильность выходных характеристик; высокая точность преобразования входных величин; высокое быстродействие, или малая инерционность; высокая надежность; незначительная мощность управления при сравнительно большой мощности на валу, т. е. высокий коэффициент усиления по мощности, что особенно важно при сигналах управления, поступающих от электронных источников.
К этим требованиям следует еще добавить специфические требования, характерные для судового электрооборудования: устойчивость к вибрациям и ударным нагрузкам; климатическая и радиационная устойчивость — для серводвигателей, работающих в условиях повышенной влажности или в атомных реакторах; низкий уровень излучаемых радиопомех — для серводвигателей, работающих в радиолокационных установках или в комплекте с электронной аппаратурой.
§ 21. СЕРВОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
В системах автоматизации применяют несколько разновидностей исполнительных двигателей постоянного тока.
Серводвигатели с барабанным якорем не имеют принципиальных конструктивных отличий от классической машины постоянного тока, изучаемой в курсе электротехники. Мощность на валу таких двигателей до 500 Вт.
Серводвигатель с полым немагнитным якорем (рис. 65) вследствие малой инерции последнего обладает большим быстродействием. Для уменьшения момента инерции якорь разделен на две части: подвижную 5 в виде полого пластмассового цилиндра, в котором запрессована обмотка из медного провода или на поверхности которого нанесена печатная обмотка, и неподвижную — ферромагнитный сердечник 6, называемый внутренним статором и служащий магнитопроводом. На внешнем статоре 4 расположена сосредоточенная обмотка возбуждения 3. Полый якорь вращается в воздушном зазоре между внешним и внутренним статорами, напряжение на его обмотку подается через щетки 2 и коллектор 1. Из-за наличия большого немагнитного зазора между внешним и внутренним статорами для создания необходимого магнитного потока требуется обмотка возбуждения со значительной м.д.с. Это приводит к увеличению размеров машины и уменьшению к.п.д. Такие двигатели выпускают мощностью 10—15 Вт, электромеханическая постоянная времени у них 0,015—0,2 с.
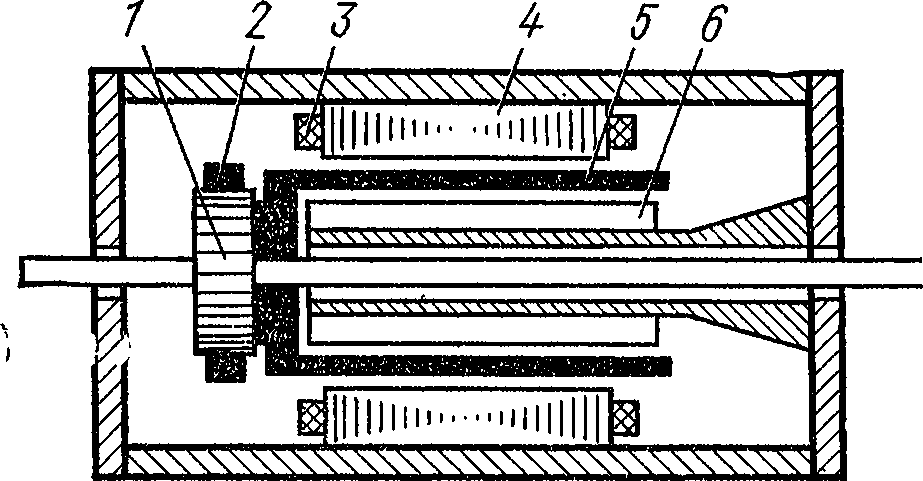
Рис. 65. Принципиальное устройство серводвигателя постоянного тока с полым немагнитным якорем
Подобные двигатели могут иметь и магнитоэлектрическое возбуждение. В этом случае обмотка возбуждения на внешнем статоре отсутствует, а внутренний статор представляет собой цилиндрический постоянный магнит с радиальной намагниченностью, создающий поток возбуждения. В качестве материала постоянного магнита используют сплавы алии (А1—Ni), алнико (А1—Ni—Со), а также другие сплавы, обладающие высокими магнитными свойствами. Серводвигатели с постоянными магнитами изготовляют мощностью до 50—100 Вт.
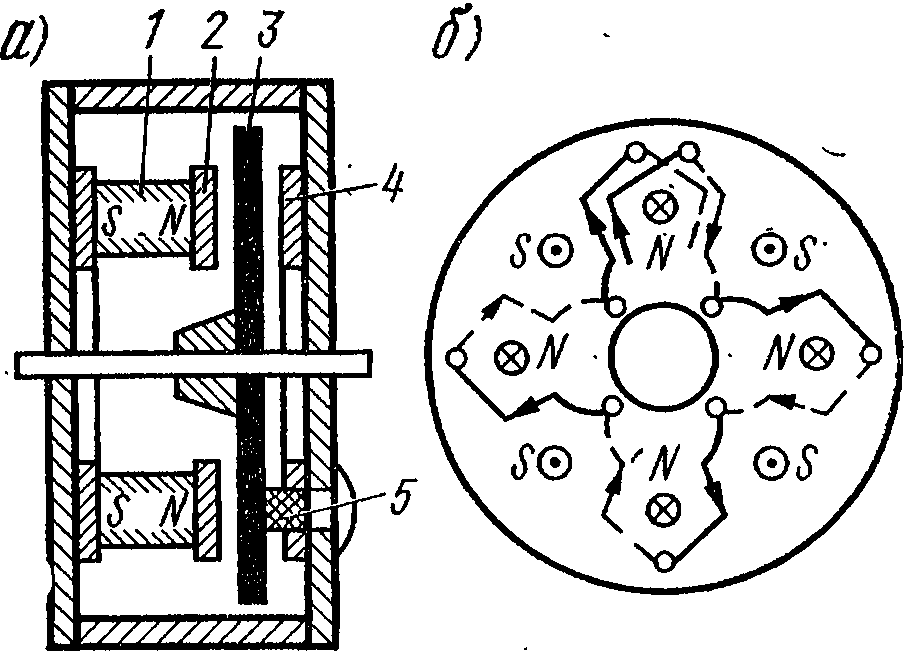
Рис. 66. Принципиальное устройство микродвигателя постоянного тока с дисковым якорем
Малой инерцией обладает также серводвигатель с дисковым якорем, представляющим собой тонкий диск без пазов из немагнитного материала (алюминия, текстолита, керамики). Проводники на диск наносят путем гальванического травления листов медной фольги, наклеенных на диск, либо гальваническим осаждением. Изготовленная таким образом обмотка называется печатной. Возбуждение двигателя с дисковым якорем (рис. 66, а) осуществляется постоянными магнитами 1 (или обмоткой возбуждения) с полюсными наконечниками 2. Магнитный поток, создаваемый магнитами, проходит аксиально через первый воздушный зазор, немагнитный диск 3 с печатной обмоткой, второй воздушный зазор и замыкается по кольцам 4, которые служат ярмом. Серебряно-графитные щетки 5, через которые подается питание в обмотку якоря, скользят по неизолированной поверхности участков проводников, находящихся на поверхности диска, как по коллектору. При протекании тока по обмотке якоря (рис. 66, б) создается вращающий момент, направленный в плоскости диска. Если диск изготовлен из алюминия, то возникающие в нем вихревые токи обеспечивают самоторможение якоря после отключения от сети. Хорошие условия охлаждения обмотки якоря позволяют повысить плотность тока в обмотке до 30—40 А/мм2 и уменьшить размеры и массу двигателя. Номинальная мощность таких двигателей лежит в пределах 5—1000 Вт, электромеханическая постоянная времени 0,01—0,04 c.
Отечественная промышленность выпускает серводвигатели с барабанным якорем серии СЛ, с полым якорем — ДПР, с постоянными магнитами — ДПМ, с дисковым якорем — ПЯ, МРМ, ДП, ДПО, ПДР.
Серводвигатели постоянного тока обладают сравнительно высоким к.п.д.: 30—50% у двигателей мощностью в десятые доли и единицы ватт и 65—75% ,— при мощности в десятки и сотни ватт. Размеры и масса их в 2—4 раза меньше, чем у одинаковых по мощности асинхронных серводвигателей.
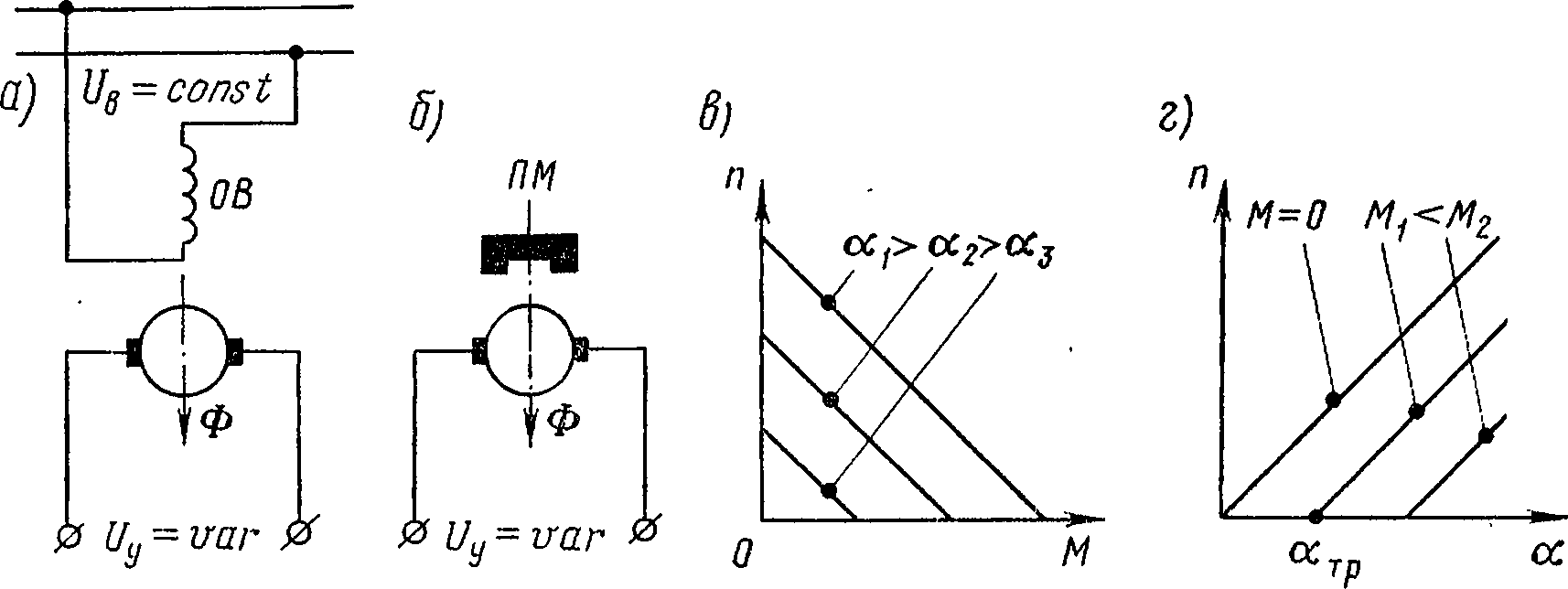
Рис. 67. Схемы включения и характеристики серводвигателей постоянного тока при якорном управлении
Существенным недостатком серводвигателей постоянного тока. является наличие скользящего контакта коллектор—щетка, который требует ухода, а также создает в результате искрения под щетками высокочастотные электромагнитные колебания, являющиеся радиопомехами. Кроме того, пульсации э.д.с. и тока в якоре приводят к появлению высших гармоник тока и напряжения, которые отрицательно сказывается на работе других приемников, подключенных к источнику. Для защиты от радиопомех применяют экранирование. Экраном обычно служит корпус двигателя с металлическим кожухом, охватывающим коллектор со щетками. Подавление высших гармоник тока и напряжения сети осуществляется с помощью LC-фильтров в цепи якоря, свободно пропускающих постоянную составляющую.
В качестве серводвигателей используют в основном двигатели постоянного тока с независимым возбуждением и с возбуждением от постоянных магнитов. Характеристики этих двигателей практически одинаковы, так как магнитный поток в обоих случаях почти не зависит от режима работы машины. Реже применяют двигатели с последовательным возбуждением.
Серводвигатели постоянного тока обладают широким диапазоном плавного изменения скорости перемещения регулирующего органа. При регулировании частоты вращения ротора возможны два основных вида управления:
непрерывное — непрерывное во времени с меняющимся по величине сигналом управления. Управляющий сигнал — напряжение — может подаваться в цепь якоря (якорное управление), в цепь возбуждения (полюсное управление) или в обе цепи одновременно (комбинированное управление);
импульсное — изменением времени, в течение которого к двигателю подводится постоянное напряжение.
Анализ способов управления проведем с допущением об отсутствии насыщения магнитопровода и реакции якоря.
Якорное управление.
При якорном управлении у двигателя с независимым возбуждением (рис. 67, а) обмотка возбуждения ОВ подключена к источнику питания с напряжением, равным номинальному, т. е. UB=const. При протекании тока по обмотке возбуждения создается магнитный поток возбуждения Ф=const. У двигателя с возбуждением от постоянных магнитов ПМ (рис. 67, б) этот поток создается магнитами.
Регулирование частоты вращения ротора осуществляется изменением напряжения управления Uy, подаваемого на якорь (Uя=Uy).
Статические характеристики серводвигателей делят на механические и регулировочные. Эти характеристики легко могут быть получены из уравнения электрического равновесия якорной цепи
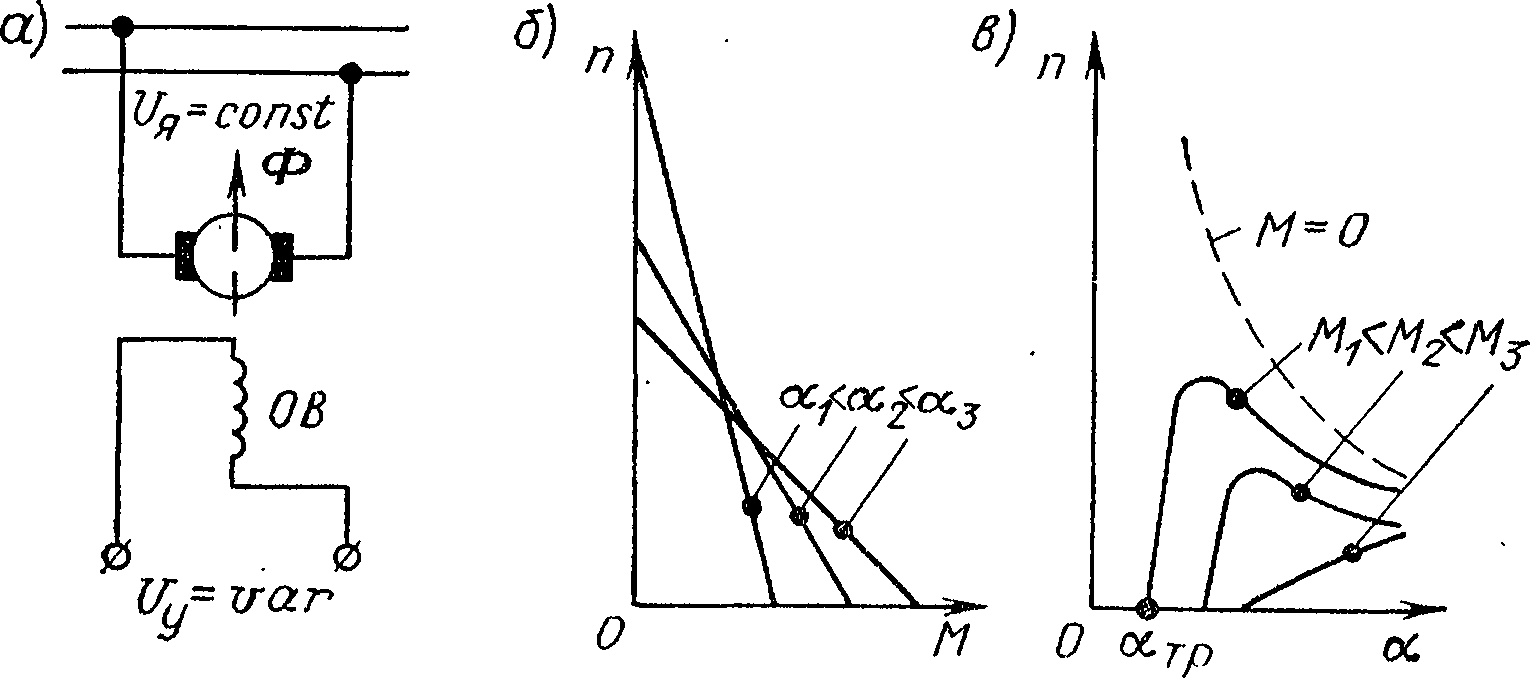
Рис. 68. Схема включения и характеристики серводвигателя постоянного тока при полюсном управлении
Это уравнение позволяет построить семейство механических характеристик n=f(M) при различных значениях коэффициента сигнала α (рис. 68, б) и семейство регулировочных характеристик n=f(a) при различных значениях момента (рис. 68, в). Значения αтр определяют зону нечувствительности. Если при заданном моменте на валу коэффициент сигнала меньше, чем αтр, то двигатель не тронется с места. Механические характеристики двигателя при полюсном управлении линейны, однако с изменением коэффициента сигнала жесткость их изменяется. Регулировочные характеристики имеют нелинейный характер и, кроме того, при небольших моментах на валу являются неоднозначными.
При отсутствии сигнала на обмотке возбуждения (α=0) и момента на валу двигателя частота вращения ротора ограничивается только моментами трения щеток по коллектору, в подшипниках и трения ротора о воздух и может достигать недопустимого значения (разнос серводвигателя).
Сравнивая якорное и полюсное управления, следует отметить, что якорный способ требует значительной мощности управления и, следовательно, при нем необходимы мощные источники сигнала управления (полупроводниковые, магнитные усилители). И все же благодаря указанным ранее преимуществам якорный способ управления используют в большинстве схем.
Импульсное управление.
В последнее время в маломощных системах автоматического регулирования все чаще применяют импульсный способ управления серводвигателями постоянного тока. Сущность его состоит в том, что регулирование частоты вращения ротора достигается путем изменения времени, в течение которого на двигатель подается номинальное напряжение. К серводвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uy, в результате чего его работа состоит из чередующихся периодов разгона и торможения. Среднее значение частоты вращения nср определяется при неизменном напряжении возбуждения Uв моментом сопротивления на
валу двигателя и относительной продолжительностью включения
![]() (42), где tu — длительность импульса; Т — период.
(42), где tu — длительность импульса; Т — период.
С увеличением относительной продолжительности импульсов при заданном постоянном моменте сопротивления средняя частота вращения якоря возрастает (рис. 69).
Если момент сопротивления на валу мал (Мс→0), то частота вращения ротора увеличивается до частоты вращения холостого хода п0 при любом значении τ, так как во время импульса 4 частота вращения возрастает, а во время паузы tп — остается почти неизменной. Чтобы частота вращения ротора однозначно определялась значением τ, во время паузы ротор должен тормозиться механическим путем (например, за счет момента сопротивления на валу) или электрическим (например, путем динамического торможения, когда якорь двигателя в момент паузы замыкается на сопротивление rд.т).
В качестве коммутирующих элементов при импульсном управлении применяют реле, контакторы с управляемыми контактами и бесконтактные элементы — тиристоры, транзисторы и др. На рис. 70 подключение якоря серводвигателя к источнику на время 4 и отключение его от источника на время 4 осуществляются транзистором, управляемым по специальной схеме.
Механические характеристики серводвигателя при импульсном управлении линейны и начинаются из одной общей точки холостого хода, причем с уменьшением τ жесткость их уменьшается (рис. 70, б). Регулировочные же характеристики нелинейны (рис. 70, в), однако в схемах с электрическим торможением во время пауз может быть достигнута линейность.
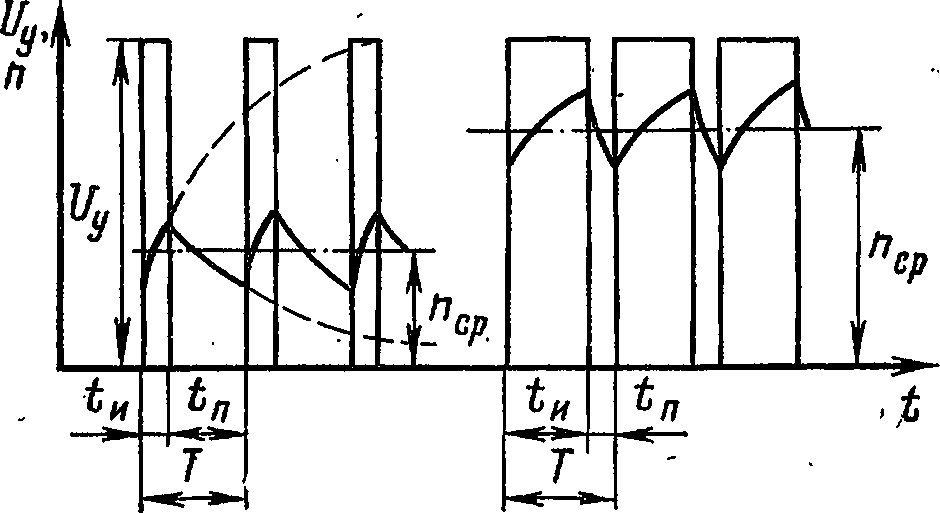
Рис. 69. График изменения частоты вращения якоря при импульсном управлении серводвигателем постоянного тока
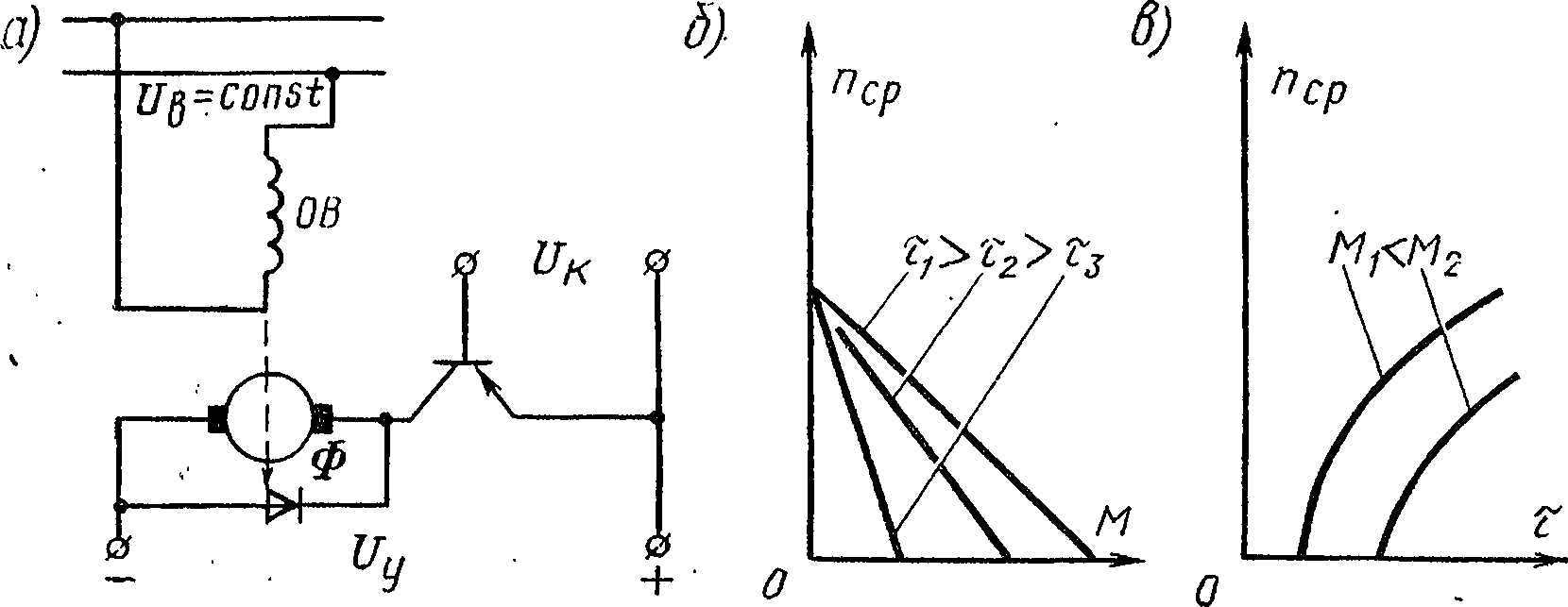
Рис. 70. Схема включения серводвигателя постоянного тока через транзистор при импульсном управлении и его характеристики
Схемы с импульсным управлением отличаются глубоким регулированием частоты вращения и меньшей средней мощностью управления, а схемы с бесконтактными коммутирующими элементами — еще и высокой надежностью. Основной недостаток — необходимость в специальной аппаратуре, преобразующей непрерывный сигнал управления в систему импульсов.