Среди электроприводов вспомогательных механизмов рулевой электропривод является наиболее ответственным. От его надежности непосредственно зависят живучесть судна и безопасность плавания в сложных метеорологических и навигационных условиях, при прохождении каналов, узкостей и на швартовках.
Рулевые электроприводы можно классифицировать по типу передачи от двигателя к баллеру руля и по системам управления.
Существуют рулевые электроприводы с механической передачей (секторные, винтовые, штуртросовые) и с гидравлической. На современных судах транспортного флота применяют секторные и гидравлические передачи с насосами переменной подачи.
Принципиальная разница между этими передачами с точки зрения электропривода состоит в том, что при секторных передачах электродвигатель жестко связан с баллером руля и передаточное число от вала двигателя к баллеру руля — величина, постоянная для данного привода. При гидравлической передаче электродвигатель вращает гидравлический насос всегда с постоянной частотой, а перекладка руля происходит в зависимости от воздействия на систему. Эти особенности передач влияют на выбор типа электропривода рулевого устройства.
В рулевых электроприводах применяют системы управления простого, следящего и автоматического действия.
В системе простого управления положение поста управления не связано с положением пера руля. Пост управления (чаще всего рукоятка или кнопки) удерживается во включенном состоянии только до тех пор, пока перо руля займет необходимое положение, определяемое по указателю (аксиометру).
В системе следящего управления перо руля всегда стремится занять положение, соответствующее положению поста управления (штурвала).
Система автоматического управления является по существу системой автоматического удерживания судна на заданном курсе. Рулевой электропривод приходит в действие при отклонении судна от заданного курса. Почти на всех современных судах наряду с ручным управлением электроприводом руля предусматривается и автоматическое — авторулевой.
Проектирование и эксплуатация рулевых электроприводов регламентируются требованиями Регистра СССР. Рулевое устройство судна должно иметь два привода: основной и запасной. Однако если основной привод является сдвоенным (состоящим из двух агрегатов, способных действовать независимо один от другого), то запасной привод не требуется. На большинстве современных судов применяют сдвоенный рулевой электропривод. Допускается, чтобы агрегаты сдвоенного привода имели общие части: румпель, сектор, редуктор или гидравлический цилиндрический блок.
Мощность основного рулевого электропривода, а для пассажирских судов — и мощность каждого агрегата сдвоенного электропривода должна быть достаточной для перекладки пера руля от 35° с одного борта до 30° на другой борт за 28 с при максимальной скорости переднего хода судна. Если максимальный угол перекладки пера руля меньше 35°, то время перекладки может быть пропорционально уменьшено.
Мощность запасного рулевого электропривода или мощность каждого агрегата сдвоенного основного электропривода непассажирских судов должна быть достаточной для перекладки руля от 20° с одного борта до 20° на другой борт за 60 с при скорости переднего хода, равной половине максимальной скорости судна, но не менее 7 уз.
Электродвигатели должны допускать перегрузку по моменту не менее 1,5 расчетного момента в течение 1 мин, а электродвигатели секторных рулевых приводов должны выдерживать стоянку под током в течение 1 мин с нагретого состояния.
Электропривод должен обеспечивать непрерывную . перекладку руля с борта на борт каждым агрегатом в течение 30 мин при наибольшей эксплуатационной скорости судна и 350 перекладок в час на угол, необходимый для удержания судна на курсе.
Электроприводы рулевых устройств должны получать питание по двум отдельным линиям (фидерам), разнесенным как можно дальше друг от друга на всем протяжении, причем одна из питающих линий подключается через аварийный щит. При исчезновении напряжения на одной линии электропривод автоматически переключается на другую. В электроприводе должна отсутствовать нулевая защита. Это значит, что повторный пуск: электродвигателей должен происходить автоматически при восстановлении напряжения после перерыва в подаче питания. Защита от перегрузки должна действовать не на отключение электропривода, а на световой и звуковой сигналы в рулевой рубке.
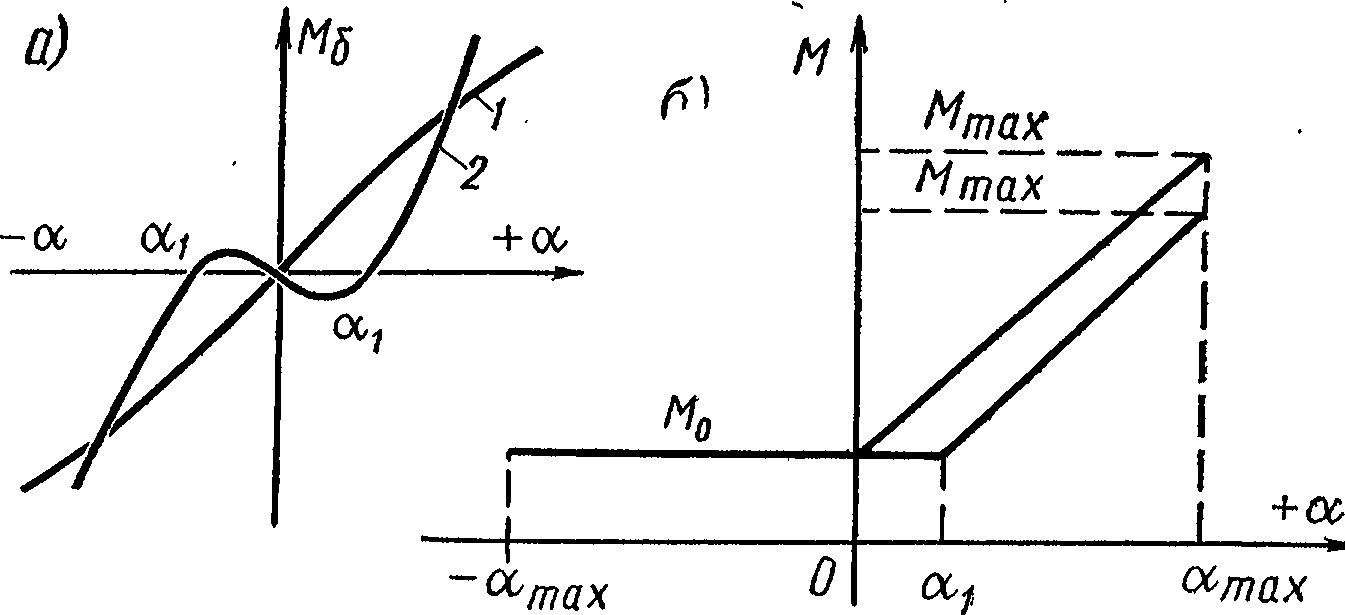
Рис. 142. Зависимости моментов от угла перекладки при переднем ходе судна на баллере руля и на валу двигателя
Рулевое устройство должно быть оборудовано тормозом или иным приспособлением, обеспечивающим удержание руля на месте в любом положении при действии руля расчетного вращающего момента. В секторных приводах это условие обычно выполняется применением самотормозящей передачи, благодаря которой вращение может передаваться только от двигателя к баллеру и исключается передача движения от баллера к двигателю.
Зависимость момента на баллере руля от угла перекладки для простых 1 и балансирных 2 рулей показана на рис. 142, а. Отрицательные углы соответствуют перекладке руля с борта к диаметральной плоскости судна, а положительные — от диаметральной плоскости на борт.
Для того чтобы построить зависимость Мб=f(α) для конкретного судна, необходимо знать его скорость, площадь и форму пера руля, плотность воды и максимальный угол перекладки пера руля (обычно αаmax=35°). Расчет зависимостей, приведенных на рис. 142, для современных рулей, имеющих профильное сечение (подобное селению крыла самолета), усложняется необходимостью определения гидродинамических коэффициентов, влияющих на величину момента Mб.
Момент на валу двигателя, зависящий от типа передачи, для секторных приводов может быть найден по формулам (Н-м): при перекладе руля от диаметральной плоскости на борт 
при перекладке к диаметральной плоскости

Обратный к. п. д. самотормозящих передач равен нулю, поэтому работа двигателя при перекладке руля с борта к диаметральной плоскости затрачивается только на преодоление потерь в передаче, т. е. двигатель работает практически на холостом ходу. При балансирных рулях двигатель работает на холостом ходу до угла α1. Далее приближенно можно принять прямую зависимость момента сопротивления на валу двигателя от угла перекладки. Такое допущение дает возможность построить зависимость M=f(α) (рис. 142, б) по уравнению

Рис; 143. Нагрузочная диаграмма электродвигателя секторного рулевого устройства

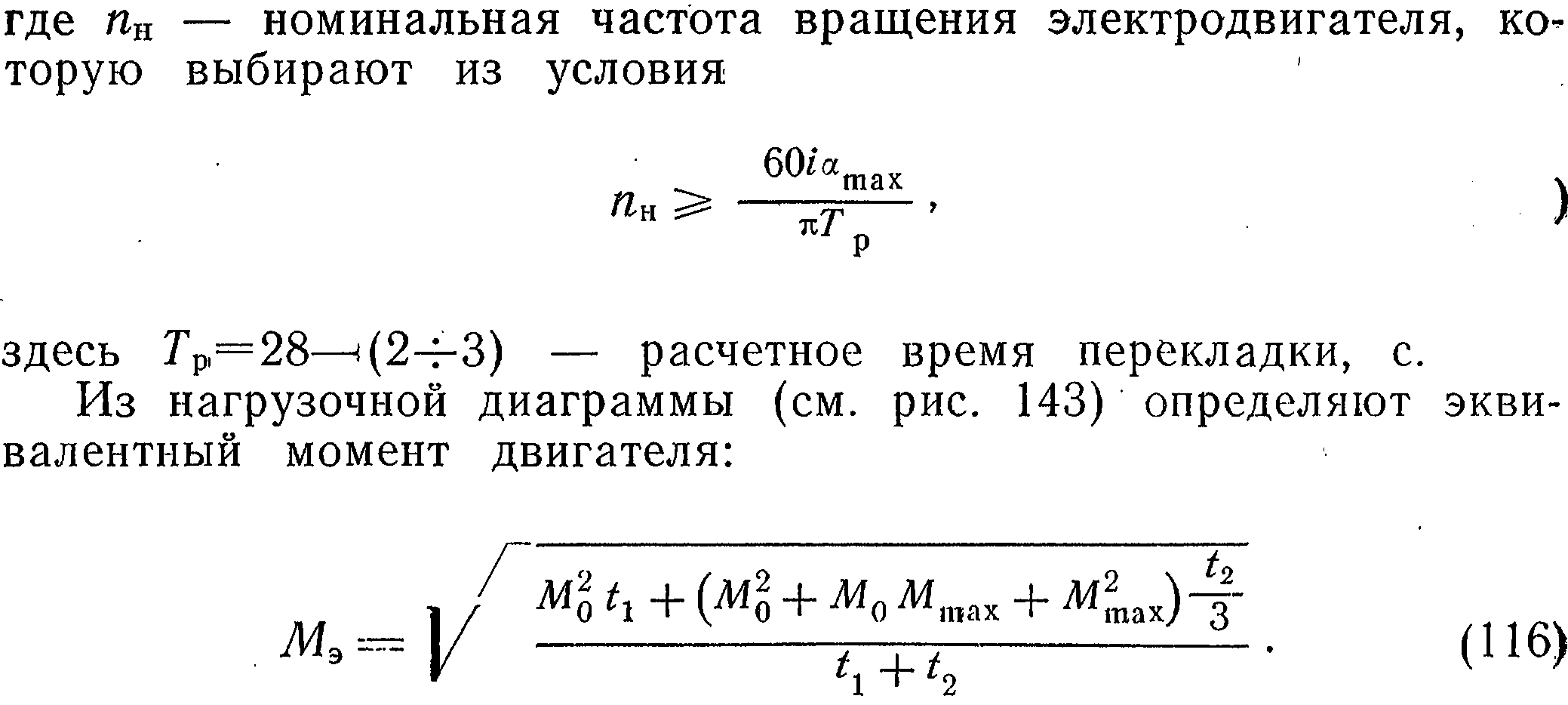
Мощность двигателя должна отвечать условию
(115)
![]()
(117)
Двигатель, выбранный по формулам (115) и (117), следует проверить в режиме сдерживания судна на курсе. Своеобразие такого режима состоит в том, что перо руля перекладывается часто (до 350 раз в час) на небольшой угол и, следовательно, для него характерны частые пуски и торможения. При построении нагрузочной диаграммы для этого режима уже нельзя пренебрегать переходными процессами (см. пунктир на рис. 143), поэтому дополнительно надо знать пусковой Мп и тормозной Мт моменты двигателя и время его разгона tp и торможения tт. Ранее отмечалось, что для быстрой и точной остановки рулевого электропривода обычно двигатель переводится в режим динамического торможения.
Для определения мощности электродвигателя насоса переменной подачи гидравлической рулевой машины необходимо рассчитать среднюю подачу Qcp и среднее давление рср насоса за время перекладки пера руля с борта на борт. Это можно сделать, если известны конструктивные параметры рулевой машины: число пар цилиндров, диаметр плунжера цилиндра, ход плунжера и максимальный момент на баллере руля. Затем мощность двигателя находят по формуле (109).
Для отечественной судостроительной промышленности разработан типизированный ряд электрогидравлических рулевых машин, отвечающих всем требованиям Регистра СССР. Поэтому при проектировании судна рулевую машину вместе с электроприводом выбирают из этого ряда и проверяют на соответствие заданному моменту на баллере, времени перекладки пера руля с борта на борт и условиям нагрева электродвигателя.