§ 61. УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ ЯКОРНО-ШВАРТОВНЫХ УСТРОЙСТВ И БУКСИРНЫХ ЛЕБЕДОК
Электропривод якорно-швартовных устройств.
Система управления электроприводом якорно-швартовного устройства предназначена для пуска двигателя с расчетным пусковым моментом, регулирования частоты вращения, реверсирования и остановки с одновременным наложением механического тормоза. Механический тормоз должен накладываться на привод и в случае исчезновения напряжения в сети. Электропривод брашпиля и якорного шпиля должен, кроме того, обеспечивать спуск якорей и якорных цепей в тормозном режиме.
Из. перечисленных требований видно, что электропривод якорно-швартовного устройства достаточно сложен. Наиболее полно этим требованиям отвечает электропривод по системе Г—Д. С другой стороны, эта система излишне громоздка, требуются дополнительные помещения для преобразовательных агрегатов, наличие машин постоянного тока повышает эксплуатационные расходы и снижает надежность ответственного электропривода.

Рис. 149. Схема электропривода брашпиля
На современных судах широко распространены электроприводы якорно-швартовных устройств с многоскоростными асинхронными короткозамкнутыми двигателями. На отечественных судах, построенных в ПНР, ГДР, Югославии и Финляндии, установлены электроприводы с трехскоростными асинхронными короткозамкнутыми двигателями, у которых первая и вторая скорости получаются путем переключения обмотки статора с треугольника на двойную звезду, а для получения третьей скорости на статоре уложена отдельная трехфазная обмотка.
На рис. 149 показана схема управления электроприводом брашпиля с трехскоростным асинхронным двигателем.
В нейтральном положении командоконтроллера замкнуты контакты K1 и К4. Через контакт К1, аварийный выключатель питания АВ и размыкающий контакт теплового реле РТ2 получает питание катушка реле напряжения PH, которое, сработав, шунтирует одним контактом контакт К1 (нулевая защита), а другим — подает питание на остальную часть схемы управления. Срабатывает вспомогательный контактор ВКТ и своими контактами шунтирует резистор в цепи обмотки тормозного электромагнита ТЭМ.
При переводе командоконтроллера в первое положение «Выбирать» замыкается контакт К2, контакт К4 остается замкнутым. Через контакт К2 получает питание катушка реверсивного контактора В, который срабатывает, замыкая главные контакты в цепи обмоток статора двигателя, а вспомогательный контакт — в цепи катушек C1, С2, СВ2 и т. д. Через этот контакт и контакт К4 получает питание катушка контактора первой скорости С1. Контактор С1, сработав, подключает к сети обмотку первой скорости, а вспомогательным контактом включает цепь катушки контактора КТ через полупроводниковый выпрямитель ПВ2. Контактор КТ включает через полупроводниковый выпрямитель ПВ1 обмотку тормозного электромагнита ТЭМ, двигатель растормаживается и начинает вращаться на первой скорости. При растормаживании двигателя дисковый тормоз механически размыкает контакт ТЭМ в цепи катушки ВКТ. Контактор ВКТ отключается и вводит последовательно с обмоткой тормозного электромагнита резистор Rд, уменьшая ток в обмотке электромагнита, а следовательно, и его нагрев. Напомним, что у электромагнитов постоянного тока, как и у контакторов, после притягивания якоря (тормозного диска) поток, а значит и притягивающее усилие, возрастают.
При переводе командоконтроллера во второе положение размыкается контакт К4, замыкается контакт К5, отключается контактор С1. Контакторы С2 и СВ2 своими главными контактами присоединяют обмотку статора двигателя двойной звездой. Частота вращения двигателя увеличивается вдвое.
Одновременно с контакторами С2 и СВ2 получает питание моторное реле времени РВ1. Это реле с выдержкой времени подготавливает цепь катушки контактора третьей скорости С3, предотвращая этим включение двигателя на третью скорость, минуя вторую при очень быстром переводе командоконтроллера из нулевого положения в третье.
В третьем положении командоконтроллера замыкается контакт К6 и срабатывает контактор С3, разрывая цепи катушек С2 и СВ2 и подключая к сети обмотку третьей скорости двигателя.
Работа схемы во всех положениях «Травить» происходит аналогично, но вместо контакта К2 замкнут контакт К3. Контактор Н своими главными контактами меняет порядок чередования фаз в главной цепи.
Первая скорость двигателя предназначена для отрыва якоря от грунта и втягивания его в клюз. В обоих случаях возможна остановка привода (заклинивание). Максимальный момент, развиваемый при этом двигателем, может вызвать поломки в механической части привода. Для уменьшения максимального момента двигателя на первой скорости в электроприводе брашпиля некоторых судов (например, типа «Волголес») обмотка соединяется в открытый треугольник, для чего убирается перемычка между выводами А и Z. Однако двигатель в этом случае работает с повышенным скольжением и потерями энергии, что приводит к его быстрому перегреву. Работа двигателя на первой скорости допускается не более 2 мин.
Третья скорость предназначена только для выбирания свободных швартовных концов. Если сообщена с редуктором брашпиля хотя бы одна из звездочек, то размыкается контакт конечного выключателя, предотвращая включение двигателя на третью скорость при выбирании якоря.
Если двигатель ошибочно включен на третью скорость при подтягивании судна к причалу, то срабатывает реле максимального тока РМ, замыкающее цепь промежуточного контактора ПК, который в свою очередь размыкает цепь контактора С3. Двигатель автоматически переключается на вторую скорость. Реле РМ срабатывает и под действием пусковых токов обмотки третьей скорости, но в этом случае реле времени РВ2, замыкающее свой контакт в цепи катушки ПК с выдержкой времени, предотвращает отключение контактора С3.
Соединение обмотки двигателя на первой скорости в открытый треугольник и отсутствие надлежащей защиты увеличивают опасность выхода двигателя из строя. Это подтверждено практикой эксплуатации электроприводов брашпилей. На некоторых судах обмотка электродвигателя брашпиля соединяется в нормальный треугольник, но для ограничения максимального момента двигателя на первой скорости последовательно в обмотку статора включаются резисторы. Следует сказать, что с точки зрения потерь энергии в двигателе и его нагрева этот способ ничуть не лучше способа открытого треугольника. Поэтому на многих судах в электроприводе брашпиля с трехскоростным асинхронным двигателем максимальный момент двигателя не ограничивается какими-либо искусственными методами.
Между электродвигателем и редуктором брашпиля есть муфта предельного момента, которая при двукратном моменте сопротивления должна проворачиваться, предохраняя механизм от поломки.
Электроприводы швартовных и буксирных лебедок.
Автоматические швартовные лебедки в автоматическом режиме работают для удерживания судна у причала, при доковании, шлюзовании или при стоянке на растяжках на бочках. Применение швартовных лебедок значительно облегчает работу палубной команды во время швартовки. Однако в процессе обычной швартовки режим работы электропривода АЩЛ не отличается от режима электропривода швартовного шпиля. Для ручного управления могут быть использованы электроприводы, схемы которых приведены на рис. 136 или 149, и любой другой электропривод якорно-швартовных механизмов. Принцип создания автоматического режима работы АШЛ требует дополнительного пояснения.
При стоянке судна у причала возникают статические и динамические силы, которые изменяют натяжение швартовных канатов в сторону как ослабления, так и усиления вплоть до разрыва. К статическим относятся силы, вызванные изменением осадки судна вследствие приема или сдачи груза, приливами и отливами, шлюзованием или докованием судна. В этих ситуациях при отсутствии АШЛ палубная команда вынуждена следить за натяжением швартовных концов и периодически делать их перетяжку. Динамические силы вызываются действием на судно волн и ветра.
В аналогичных условиях работают буксирные канаты при буксировке другого судна или иного плавучего объекта. Обычно конец буксирного каната закрепляется на барабане автоматической буксирной лебедки (АБЛ), установленной на буксирующем судне.
Назначение АШЛ и АБЛ — поддерживать натяжение швартовных и буксирных канатов в заданных допустимых пределах. Сделать это практически можно только путем стравливания и выбирания каната в зависимости от его натяжения. В этом смысле режимы работы АБЛ и АШЛ принципиально не отличаются, поэтому все сказанное далее можно отнести к обеим лебедкам в равной степени.
Итак, управляющим воздействием в электроприводе АШЛ является натяжение швартовного троса. В зависимости от способа контроля натяжения электроприводы АШЛ делятся на два вида. В первом из них имеется специальное устройство — датчик тяговой силы (ДТС) для измерения натяжения троса. При нормальном натяжении в тросе двигатель лебедки выключен и заторможен электромагнитным тормозом. При увеличении натяжения выше установленного ДТС дает сигнал на включение двигателя в режим «Травить», а при снижении натяжения ниже уставки — на включение двигателя в режим «Выбирать».
Если за основу взять, например, схему, приведенную на рис. 136, то для автоматического управления швартовной лебедкой необходимо катушки реле В и Н переключить на питание через соответствующие контакты ДТС, не меняя ничего в остальной части схемы. При автоматическом управлении двигатель будет работать только на малой частоте вращения.
Электроприводы АШЛ и АБЛ первого типа (с ДТС) шире применяют на судах по сравнению с электроприводами второго типа.
В электроприводах второго типа отсутствует ДТС, а натяжение троса контролирует сам двигатель, постоянно находящийся во включенном состоянии. Он при этом выполняет роль упругого звена. Большой интерес представляет электропривод АШЛ, показанный на рис. 150. Назовем его тиристорным электроприводом стабилизированного тока (ТЭСТ).

Рис. 150. Схема тиристорного электропривода стабилизированного тока
Главная его особенность состоит в том, что тиристорный преобразователь ТП обеспечивает на стороне постоянного тока выполнение условия Id=const независимо от нагрузки на ТП. Другая особенность ТЭСТ заключается в том, что от одного преобразователя получают питание электродвигатели всех (m) АШЛ, установленных на судне, причем якоря двигателей включаются последовательно. Число АШЛ на судне должно быть равно числу швартовных концов, удерживающих судно у причала, т. е. m=4-6 (на суперсудах — до 12).
Прежде чем рассматривать особенности работы двигателя в системе стабилизированного тока, следует пояснить работу ТП, который может быть собран, например, по схеме на рис. 126. Если пренебречь активным и индуктивным сопротивлениями на стороне переменного тока ТП, то можно записать:
![]() (140)
(140)
где Ud0 — наибольшее средневыпрямленное напряжение при α=0.
Средневыпрямленный ток Id определяется соотношением


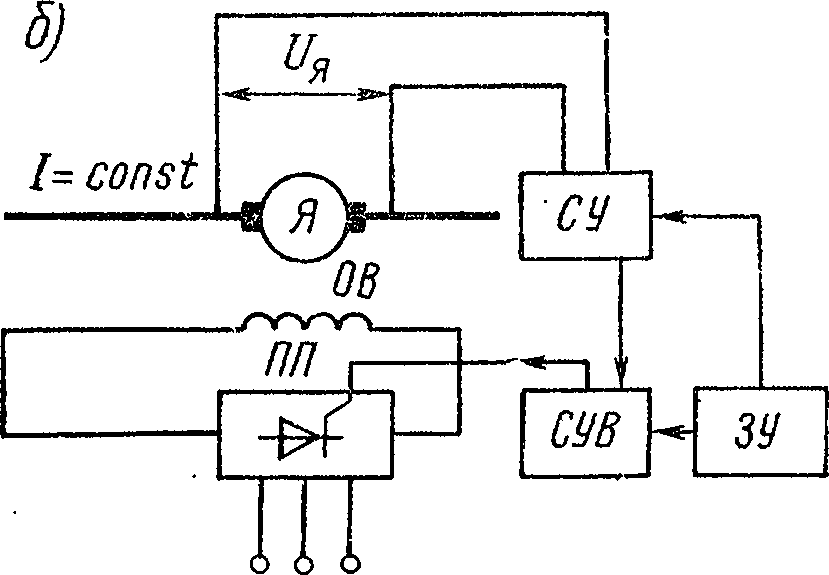
Рис. 151. Механические характеристики двигателя в тиристорном электроприводе и структурная схема управления им в системе стабилизированного тока
Работа электродвигателя в системе стабилизированного тока во многом отличается от работы в обычных условиях при U=const. В данном случае момент, развиваемый двигателем (71) М=kмIdФ, определяется только значением потока возбуждения и не связан с э.д.с. и частотой вращения никакой функциональной зависимостью. Поэтому механические характеристики двигателя (рис. 151, а) являются прямыми, параллельными оси ординат. Все управление двигателем переносится в его цепь возбуждения (рис. 151, б). Обмотка возбуждения получает питание от полупроводникового преобразователя ΠП, который может быть выполнен на тиристорах или транзисторах. Ток возбуждения, а следовательно, и момент на валу двигателя соответствуют сигналу задающего устройства ЗУ, который воздействует на систему управления возбуждением СУВ.
Механические характеристики двигателя в системе, стабилизированного тока наилучшим образом соответствуют требованиям АШЛ в автоматическом режиме. Однако если учесть, что швартовная лебедка должна работать и при ручном управлении, в механические характеристики должна быть введена необходимая коррекция. Проще всего это делается при помощи тахогенератора, расположенного на одном валу с двигателем (на схеме рис. 151, б не показан). Вводя сигнал тахогенератора, пропорциональный частоте вращения двигателя, в СУВ можно придать любой желаемый вид механическим характеристикам.
На рис. 151, б коррекция механических характеристик осуществляется при помощи обратной связи, подключенной параллельно якорю. Если пренебречь незначительной постоянной величиной IdRя, то можно считать, что напряжение обратной связи Uя зависит от частоты вращения двигателя и потока возбуждения:![]() .
.
Задающий сигнал также связан с потоком возбуждения: ![]() (где kв — коэффициент пропорциональности, который может быть соответствующим образом подобран и сделан постоянным).
(где kв — коэффициент пропорциональности, который может быть соответствующим образом подобран и сделан постоянным).
В сравнивающем устройстве СУ оба сигнала сравниваются, и при условии![]() поступает сигнал в СУВ, который вызывает
поступает сигнал в СУВ, который вызывает
уменьшение потока возбуждения в такой степени, чтобы частота вращения двигателя не превышала nmax.
В автоматическом режиме работы АШЛ двигатель всегда включен на выбирание. Задающим устройством устанавливается момент двигателя, соответствующий заданному натяжению троса. При увеличении натяжения выше заданного происходит стравливание троса и двигатель работает в режиме противовключения (+Е). При уменьшении натяжения двигатель выбирает трос.
Если двигатели АШЛ имеют принудительную вентиляцию (обдуваемые), то ток Id можно установить равным номинальному току двигателя. При отсутствии внешнего обдува ток Id должен быть несколько уменьшен.
Несмотря на то, что один ТП питает все АШЛ, его мощность не превышает суммарной мощности двух двигателей. Дело в том, что в режиме стоянки под током каждый двигатель потребляет мощность не более величины![]() , а автоматические травление и выбирание происходят неодновременно у всех двигателей. Кроме того, важно отметить, что в системе стабилизированного тока режим противовключения происходит с отдачей энергии от двигателя в питающую сеть или другим двигателям, как при рекуперативном торможении в обычных приводах. При ручном управлении АШЛ во время швартовки одновременно практически больше двух лебедок не работает.
, а автоматические травление и выбирание происходят неодновременно у всех двигателей. Кроме того, важно отметить, что в системе стабилизированного тока режим противовключения происходит с отдачей энергии от двигателя в питающую сеть или другим двигателям, как при рекуперативном торможении в обычных приводах. При ручном управлении АШЛ во время швартовки одновременно практически больше двух лебедок не работает.