§ 5. СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БУРОВЫХ УСТАНОВОК
В настоящем параграфе рассматриваются схемы управления электроприводами некоторых серийных электрифицированных буровых установок. На буровых установках БУ-75 БрЭ, Бу-80БрЭ-1, Уралмаш 125БЭ и Уралмаш 4Э-61 применены следующие виды электропривода основных механизмов: индивидуальный нереверсивный электропривод буровых насосов с высоковольтными синхронными электродвигателями;
групповой реверсивный электропривод лебедки и стола ротора с высоковольтным или низковольтным (Уралмаш 4Э) асинхронным электродвигателем с фазным ротором с дроссельно-контакторным управлением;
индивидуальный электропривод ряда вспомогательных механизмов с низковольтными асинхронными короткозамкнутыми электродвигателями.
Электропривод лебедки и ротора
Для управления приводными электродвигателями лебедки и ротора применяют буровые магнитные станции СБ-58-6Э, СБ-58-4Э, СБ-58-75, СБ-64-500.
В этих станциях для уменьшения числа контакторных ступеней применяют схему дроссельного пуска. Схема управления асинхронным электродвигателем буровой лебедки приведена на рис. 113.
Электродвигатель лебедки включается реверсивными высоковольтными контакторами В и Н, установленными в ячейке № 6 распределительного устройства КРНБ-6М.
Цепи управления лебедкой выполнены на выпрямленном токе, за исключением высоковольтных контакторов В и Н в реле РП1, имеющих втягивающие катушки переменного тока. Управление приводом лебедки дистанционное, с пульта бурильщика, причем обеспечивается автоматический разгон двигателя в четыре ступени в функции времени.
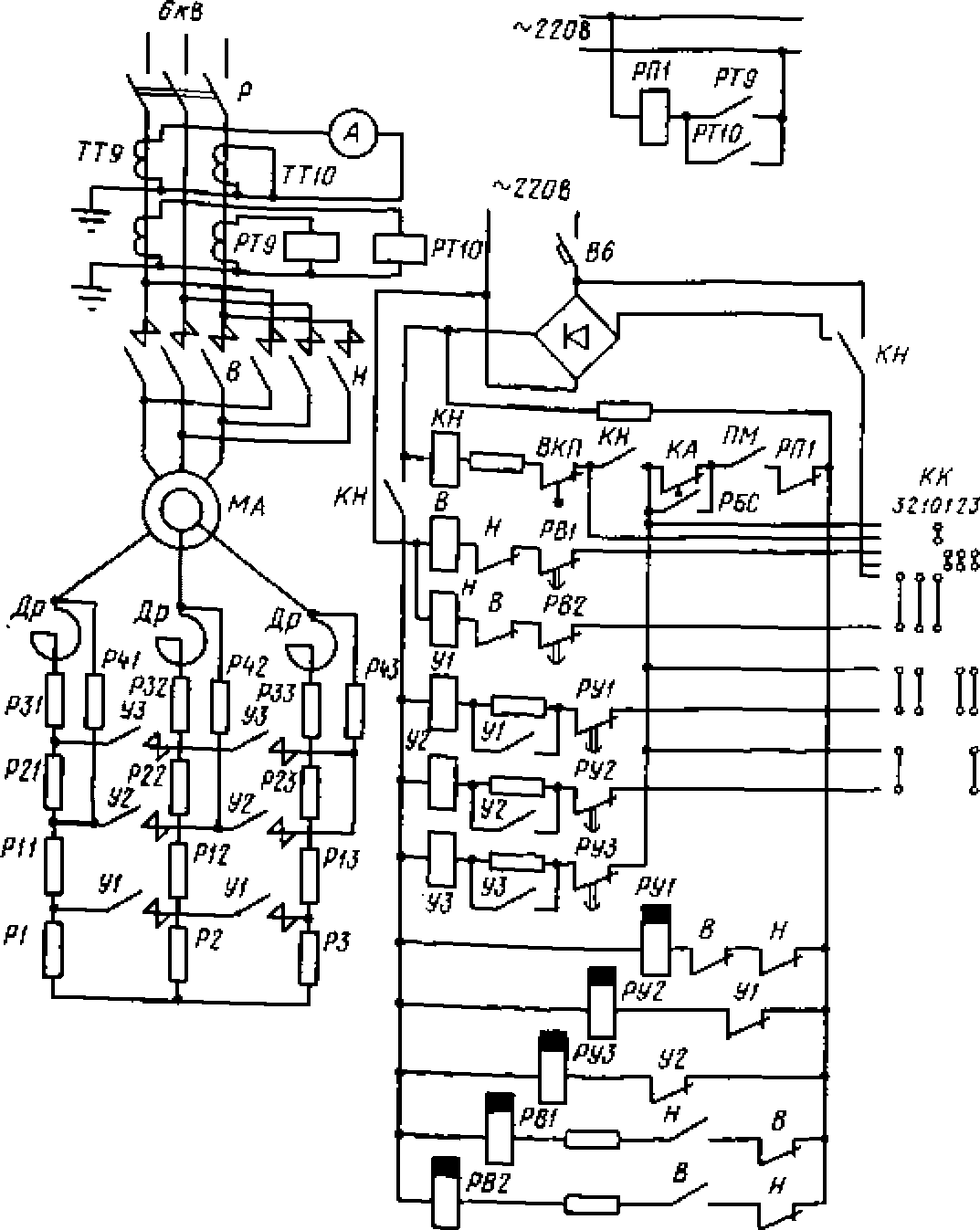
Рис. 113. Схема управления асинхронным электродвигателем буровой лебедки
Схема управления электроприводом лебедки действует следующим образом.
Предварительно включают электродвигатель насоса, подающего смазку в редуктор (контакт ПМ закрывается). После включения напряжения на силовые и управляющие цепи при нормальном положении всех элементов защиты и блокировки катушка контактора Н подготавливается к включению. При установке командоконтроллера КК на пульте бурильщика в нулевое положение контактор КН включается и шунтирует своим замыкающим блок-контактом контакт командоконтроллера. При этом одновременно выпрямленное напряжение, равное 200 В, поступает на зажимы цепей управления, а замыкающие контакты КН готовят цепь питания катушек контакторов В и Н. В цепи этих контакторов введены размыкающие контакты реле времени РВ1 и РВ2, которые обеспечивают одновременность включения контакторов В и Н. При повороте рукоятки КК вправо в третье положение включается контактор В, запуская электродвигатель МЛ, и размыкающий блок-контакт В разрывает цепь катушки РУ1.
Отключаясь, РУ1 с выдержкой времени замыкает цепь катушки контактора У1, контактор ускорения У1 замыкает первую ступень реостата в цепи ротора двигателя и своими размыкающими блок-контактами разрывает цепь катушки реле РУ2, которое с выдержкой времени замыкает размыкающий блок- контакт в цепи катушки контактора У2. Контактор У2 выводит вторую ступень реостата и размыкает цепь катушки РУ3, с выдержкой времени включается контактор УЗ и выводит третью ступень реостата.
Предусмотрена возможность длительного включения второй ступени ускорения для работы с низкой частотой вращения. При этом командоконтроллер КК оставляют в первом или во втором положении, при этом цепь У2 разомкнута. Первая ступень ускорения обеспечивает плавный подъем инструмента с клиньев, так как момент электродвигателя незначительно превышает момент нагрузки; вторая — интенсивный разгон после снятия инструмента с клиньев; третья — разгон инструмента до максимальной скорости. Требуемая форма механической характеристики электродвигателя обеспечивается включением дросселя и активного сопротивления в роторную цепь. В процессе разгона электродвигателя индуктивное сопротивление ротора снижается от некоторого максимального значения до нуля, что позволяет обеспечить плавный и интенсивный разгон лебедки.
В схеме управления электродвигателем лебедки предусмотрены следующие защиты и блокировки:
нулевая блокировка, препятствующая произвольному пуску двигателей после исчезновения и восстановления напряжения или после срабатывания защиты; эта блокировка осуществляется контактором КН;
защита от коротких замыканий, осуществляемая максимальными токовыми реле РТ9 и РТ10 с ограниченно зависимой выдержкой времени, воздействующими на катушку реле РП1;
блокировка, не допускающая работу электродвигателей лебедки при неработающем маслонасосе (осуществляется блок- контактом пускателя электродвигателя маслонасоса);
блокировка, исключающая возможность повреждения стрелы АСП-3 талевым блоком подъемной системы Э (контакты КА и РБС включены в цепь защиты лебедки—контактора КН);
КА размыкается в момент, когда талевый блок находится на высоте 20 м, РБС отключается при подходе стрелы АСП-3 к центратору, поэтому если стрела находится у центратора, талевый блок становится, не доходя до его уровня;
защита от удара талевым блоком по крон-блоку (осуществляется размыкающим контактом конечного выключателя ВКП, включенного в цепь катушки XX).
Для контроля за работой двигателя в режиме подъема инструмента и бурения ротором в схеме предусмотрен амперметр А, контролирующий силу тока статора двигателя.
В электроприводе лебедки широко применяют электромагнитные муфты и тормоза. Использование электромагнитных муфт обеспечивает плавный разгон привода, упрощает его, позволяет применять нерегулируемые электродвигатели переменного тока (синхронные и асинхронные с КЗ ротором), одновременно повышая технико-экономические показатели привода лебедки и надежность электрооборудования, улучшая условия его эксплуатации, обеспечивая полное использование электродвигателей по мощности. Электромагнитные муфты также дают возможность унифицировать буровые установки с дизельным и электрическим приводами, форсировать переходные процессы, что обеспечивает повышение производительности подъемных операций. В электроприводе лебедки электромагнитные муфты устанавливают между приводными электродвигателями и трансмиссией. Привод с электромагнитными муфтами обеспечивает непрерывный переход от натяжения талевой системы к подъему инструмента, остановку колонны бурильных труб на заданной высоте, полную загрузку приводных электродвигателей и равномерное распределение нагрузки между ними.
В качестве вспомогательных тормозов буровых лебедок применяют электромагнитный тормоз. В электромагнитных индукционных и порошковых тормозах вся энергия торможения превращается в теплоту, для отвода которой предусматривается водяное или воздушное охлаждение. Относительно простая конструкция, отсутствие фазной обмотки, плавность, удобство и легкость управления тормозным моментом позволяют считать электромагнитные тормоза наиболее перспективными для буровых лебедок.
Основное преимущество электромагнитных тормозов — возможность плавного регулирования в широких пределах тормозного момента, а также относительная простота и легкость автоматизации процесса торможения. Электромагнитные порошковые тормоза можно также использовать в качестве регуляторов подачи долота.
Примером буровой установки с электромагнитной муфтой может служить буровая установка БУ-80 БрЭ-1, в которой привод буровой лебедки осуществляется синхронным электродвигателем СДЗБ-13-42-8 (мощностью 450 кВт, частотой вращения вала 750 мин-1 и напряжением 6 кВ). Для передачи момента электродвигателя между ним и трансмиссией установлена электромагнитная муфта скольжения ЭМС-750, а в качестве вспомогательного тормоза и регулятора подачи долота используется ферропорошковый тормоз ТЭП-4500.
Система управления синхронным электродвигателем должна обеспечить его нормальный пуск и введение в синхронный режим, а также автоматическое регулирование возбуждения электродвигателя, так как нагрузка изменяется в широких пределах (рис. 114).

Рис. 114. Схема управления синхронным электродвигателем буровой установки БУ-80БрЭ-1
Статор электродвигателя получает питание от сети 6 кВ через высоковольтный контактор КВМ-400/30. Обмотка возбуждения синхронного двигателя питается от однофазного тиристорного возбудителя ТВ, состоящего из блока силовых вентилей БВ1, блока управления преобразователем БП1 и трансформатора ТН1. Возбудителем двигателя при пуске и втягивании в синхронный режим управляет бесконтактный узел синхронизации, состоящий из разрядного сопротивления РД6, управляемых вентилей ВУ5 и ВУ6 и вспомогательных элементов. Обмотки магнитного усилителя имеют назначение: 1Н— 1К — положительная обратная связь по току статора электродвигателя; 2Н—2К — отрицательная обратная связь по напряжению сети; 3Н—3К — обмотка форсировки возбуждения; 4Н—4К — отрицательная обратная связь по току разрядного резистора, запирающая возбудитель при разгоне; 5Н—5К — отрицательная обратная связь по току возбуждения электродвигателя; 6Н—6К — задающая обмотка; 7Н—7К — обмотка отрицательного смещения.
В исходном состоянии схемы УЛ1 находится в нулевом положении, УП — в положении «рабочий режим», пускатель ПН, реле РП, РФ и РВТ втянуты, остальные аппараты отключены. Для пуска электродвигателя на холостой ход (муфта отключена) УП1 поворачивается вправо и затем возвращается в нулевое положение, втягивается РВ и своим замыкающим контактом включает контактор К, двигатель подключается к сети и начинает разгоняться. Одновременно включается пускатель ПВ и подает питание на возбудитель. Однако ток в РВСД отсутствует. Возбудитель при этом заперт. В начале пуска двигателя на обмотке возбуждения трансформируется значительное напряжение.
Тиристоры ВУ5, ВУ6 открыты, так как к их управляющим цепям приложено напряжение, превышающее напряжение запирания стабилитронов Ст6, Ст7. По цепи обмотки возбуждения и разрядного резистора РД6 протекает переменный ток.
Пропорциональное этому току напряжение снижается в РД17, выпрямляется и подается на обмотку магнитного усилителя, который полностью размагничивается, а возбудитель заперт. Амплитуда и частота тока, протекающего по цепи возбуждения, уменьшаются по мере увеличения частоты вращения электродвигателя.
При достижении подсинхронной скорости трансформируемое напряжение становится меньше напряжения запирания стабилитронов. При этом тиристоры ВУ5 и ВУ6 закрываются, а ток в цепи РД6 снижается до нуля. Сигнал на обмотке 4Н—4К, запирающий МУ, исчезает и на выходе возбудителя появляется сравнительно большое напряжение постоянного тока, вызывающее быстрое нарастание тока возбуждения; возможные два- три колебания частоты вращения и тока, затем электродвигатель втягивается в синхронный режим, токи возбуждения и статора постепенно стабилизируются.
При значительном снижении напряжения в сети отпадает якорь реле РФ, и его контакты замыкают цепь обмотки 3Н— 3К, вследствие чего ток возбуждения увеличивается до максимального значения. При восстановлении напряжения реле снова включается, отключая цепь обмотки 3Н—3К.
Для защиты системы от перегрузки по току и защиты минимального напряжения в схеме используют контакты реле и контакторов в силовой цепи.
Электропривод буровой лебедки с электромагнитными муфтами и тормозами обеспечивает также управление электромагнитными муфтами. Электромагнитная муфта позволяет включать и отключать барабан лебедки при спускоподъеме, не прибегая к коммутации цепи электродвигателя.
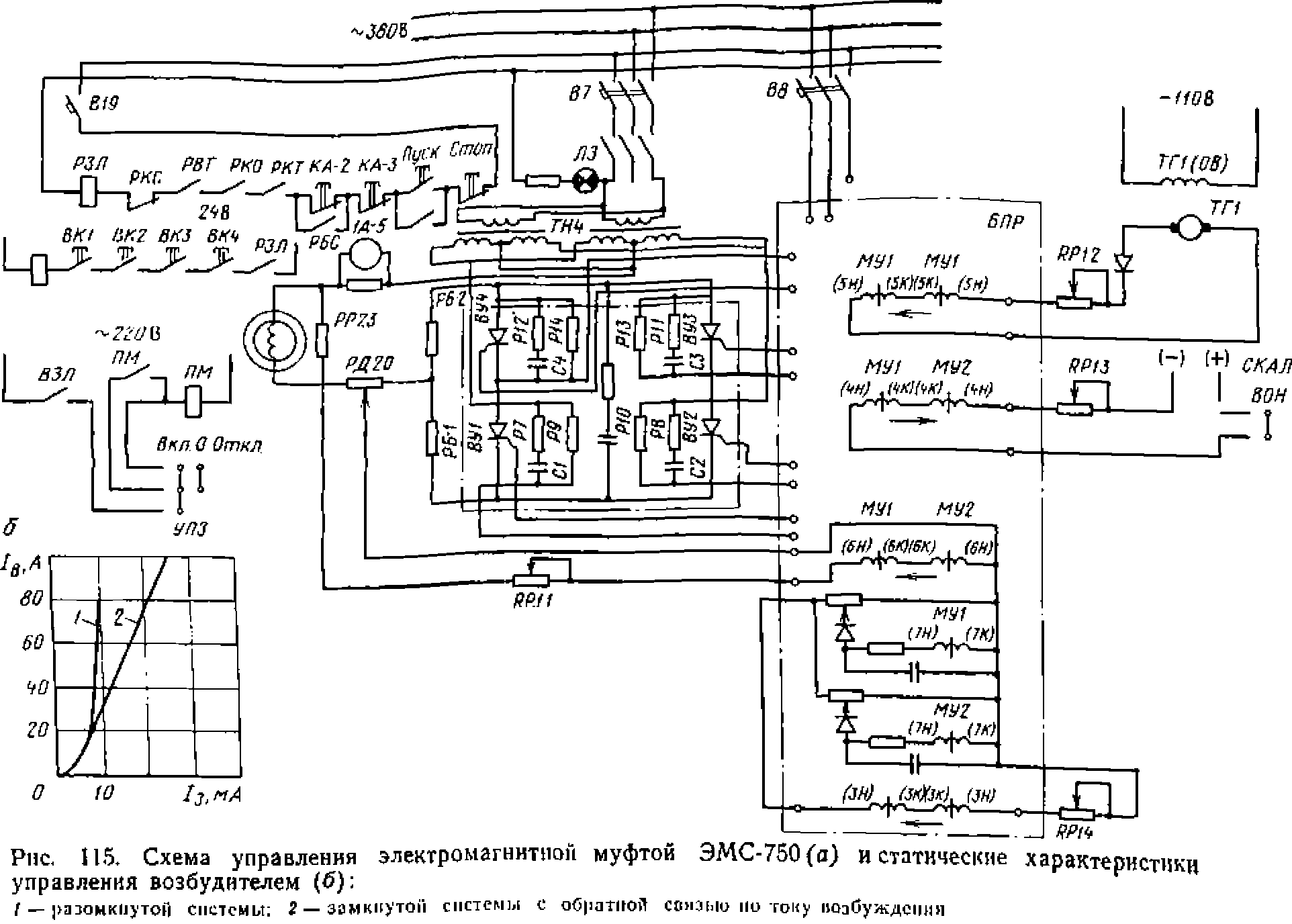
Особенностью управления электромагнитной муфтой является необходимость изменения силы тока возбуждения муфты при разгоне привода по определенному закону в зависимости от времени. Для буровых установок 125Э, 160Э и 80БрЭ применяют муфту ЭМС-750 (рис. 115).
Обмотка возбуждения муфты ЭМС получает питание от реверсивного однофазного тиристорного преобразователя БВ3, блока управления тиристорным преобразователем БПР и трансформаторов ТН4 к ТН5. Для определения частоты вращения вала используют тахогенератор ТГ1, установленный на ведомом валу муфты.
Обмотки магнитного усилителя имеют назначение: 4Н—4К — задающая; 5Н—5К — отрицательная обратная связь по частоте вращения; 6Н—6К — отрицательная обратная связь по по току возбуждения муфты; 7Н—7К— отрицательное смещение.
Задающая обмотка магнитного усилителя включается контактом сельсинного командоаппарата лебедки (СКАЛ), задающее напряжение пропорционально углу поворота рукоятки СКАЛ; обмотка обратной связи по частоте вращения питается от тахогенератора ТГ1. Для включения цепей защиты и лебедки при работе без электромагнитного тормоза универсальный переключатель ставится в среднее положение. При этом в цепи РЗЛ шунтируется блокировка системы управления тормозом и разрывается цепь его задающей обмотки. При нажатии на кнопку «пуск —защита лебедки» включается реле РЗЛ и своим замыкающим контактом включает выключатель, благодаря чему прекращается аварийное торможение, однако барабан остается заторможенным ручным тормозом. Затем питание обмотки возбуждения ЭМС поворотом рукоятки УП3 в положение «Вкл» включается (втягивается магнитный пускатель ПМ, подающий питание на тиристорный возбудитель), запускается электродвигатель лебедки, стрела АСП отводится назад, реле втягивается.
Исходное положение схемы: реле РЗЛ включено, электродвигатель вращается, магнитный пускатель ПМ втянут, сила тока возбуждения муфты равна нулю, так как СКАЛ стоит в нулевом положении, катушка вентиля выключателя находится под током, колонна удерживается механическим ручным тормозом.
Перед подъемом включается шинно-пневматическая муфта, соединяющая вал лебедки и редуктор, затем рукоятка СКАЛ переводится до отказа в положение «вперед», что приводит к замыканию контакта СКАЛ в цепи задающей обмотки возбудителя муфты и размыканию в цепи обмотки возбуждения тормоза. В задающей обмотке появляется ток управления, сила тока возбуждения муфты возрастает, растормаживается механический тормоз и начинается подъем инструмента.
Муфта и тормоз управляются одним сельсинным командоаппаратом СКАЛ и получают питание от общего выпрямительного моста. В связи с этим задающее напряжение подключается поочередно к ЭМС и ЭМТ в зависимости от положения рукоятки «вперед» или «назад». При повороте СКАЛ в крайнее положение на зажимы обмотки возбуждения муфты подается максимальное выпрямленное напряжение с тиристорного возбудителя.
Отрицательная обратная связь по мере роста скорости ведомой части ЭМС снижает напряжение тиристорного преобразователя до величины, обеспечивающей номинальный ток возбуждения. По окончании подъема свечи рукоятка СКАЛ возвращается в нулевое положение, и барабан лебедки фиксируется ручным тормозом.
Схема управления ЭМС-750 отключается поворотом рукоятки УПЗ в положение «Откл», пускатель ПМ отключается и размыкает цепь питания тиристорного возбудителя.
Реле РЗЛ при отключении размыкает цепь питания выключателя. С помощью этого реле автоматически накладывается ленточный тормоз. При подъеме инструмента в цепи РЗЛ действуют следующие блокировки: контроль за нахождением стрелы АСП — при выдвинутой стреле АСП к центру скважины размыкается контакт реле РБС, а при подходе талевого блока к центратору размыкается контакт КА-2 путевого командоаппарата, и реле РЗЛ отключается; контроль высоты подъема талевого блока (КА-3 путевого командоаппарата); кнопка «стоп» на корпусе СКАЛ для экстренного торможения.
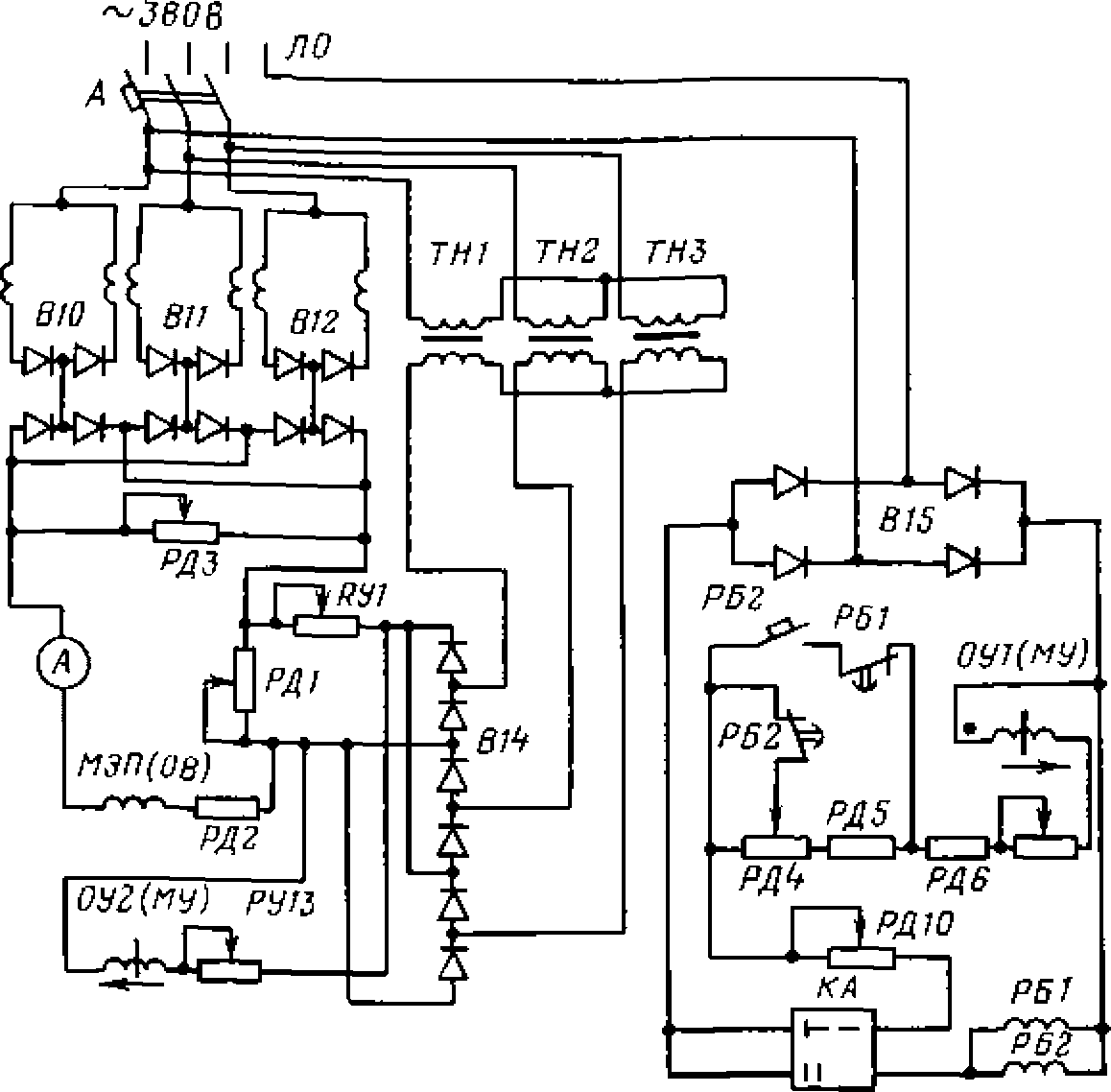
Рис. 116. Схема управления порошковой муфтой МЭП-800
Для управления ферропорошковой муфтой МЭП-800 (рис. 116) в качестве регулируемого источника тока возбуждения используется трехфазный магнитный усилитель МУ. Обмотка смещения 0У2 обеспечивает нулевой ток выхода МУ. При переводе командоаппарата лебедки КА из нулевого в левое положение по обмотке управления ОУ1 усилителя МУ проходит минимальный ток, соответствующий моменту муфты 0,25 от номинального. Якори реле РБ1 и РБ2 в начальный момент втянуты и отключаются при переводе командоаппарата в крайнее положение; контакт реле РБ1 с выдержкой времени 0,5 с закрывается и шунтирует резисторы РД4 и РД5, ток управления увеличивается до форсированного значения, и момент муфты достигает 2Мном. Реле РБ2 с выдержкой времени 4—5 с переключает ступени резисторов РД4 и РД5, сила тока управления снижается до величины, соответствующей моменту муфты (1,1 —1,3) Мном. К этому моменту разгон привода практически заканчивается.
Чтобы обеспечить полное размагничивание ферропорошковой муфты после отключения тока возбуждения, в схеме предусмотрен контур размагничивания обмотки возбуждения небольшим обратным током через трансформаторы ТН1—ТН3 и выпрямительный мост В14.
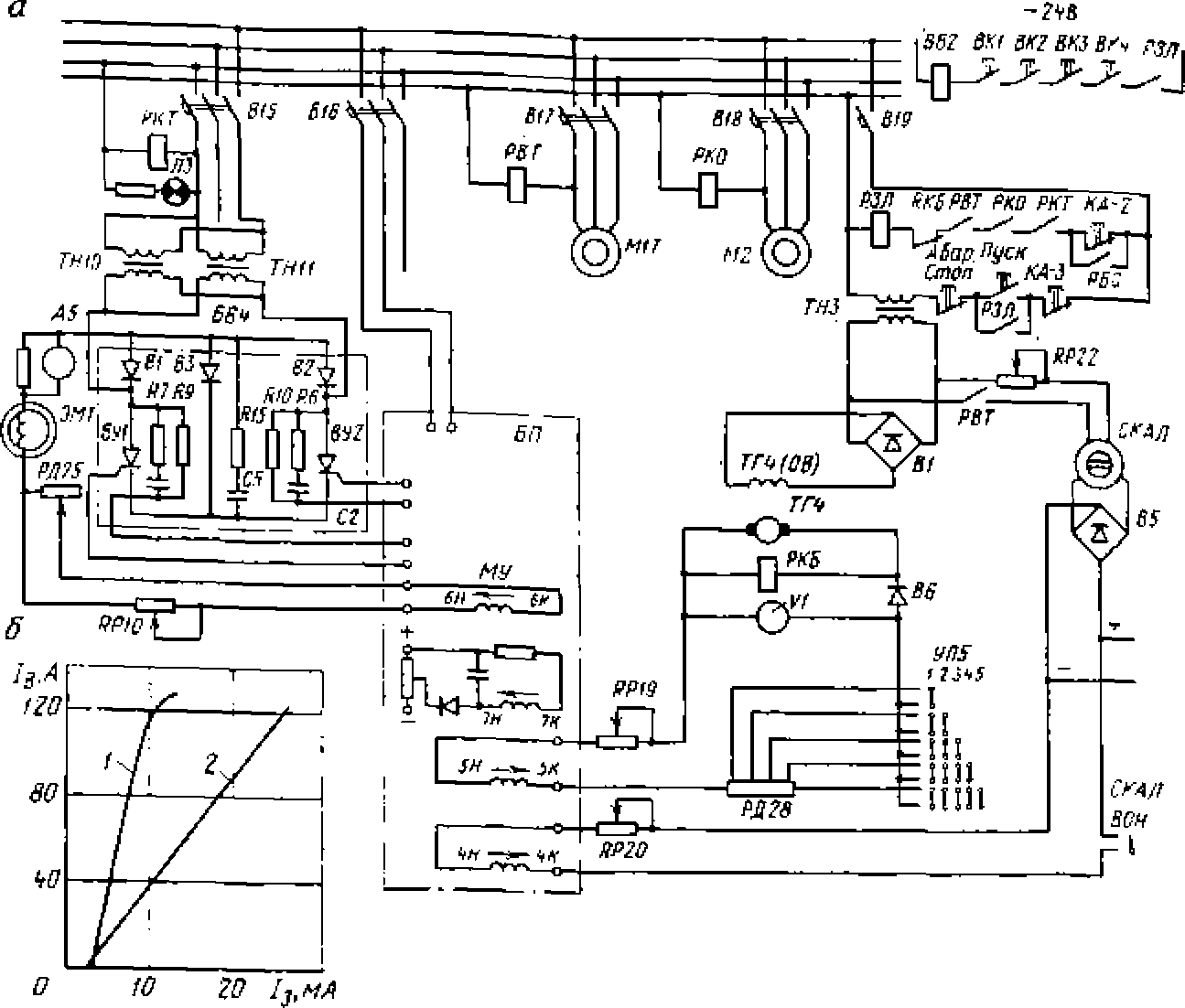
Рис. 117. Схема управления электромагнитным тормозом ЭМТ-4500 (а) и статические характеристики управления возбудителем (б):
1 — разомкнутой системы; 2 — замкнутой с обратной связью по току возбуждения
Электропривод буровой лебедки с электромагнитными муфтами и тормозами содержит схемы управления электромагнитными тормозами. Система управления электромагнитным тормозом обеспечивает свободный разгон инструмента под действием силы собственного веса, автоматическое поддержание заданной установившейся скорости инструмента, интенсивное торможение при подходе к ротору.
На буровых установках 125Э, 125ДГ, 160Э и 160ДГ применяют электромагнитный тормоз ЭМТ-4500, а на установке 80БрЭ-1 — ферропорошковый электромагнитный тормоз ТЭП- 4500.
Обмотка возбуждения тормоза ЭМТ-4500 (рис. 117) получает питание от однофазного полууправляемого тиристорного преобразователя БВ4, блока управления тиристорным преобразователем БП и трансформаторов ТН10, ТН11.
В качестве датчика скорости спуска используют тахогенератор ТГ4. Назначение обмоток магнитного усилителя: 4Н— 4К — задающая; 5Н—5К — положительная обратная связь по скорости ЭМТ; 6Н—6К — отрицательная обратная связь по току возбуждения ЭМТ.
Задающая обмотка магнитного усилителя МУ питается от того же СКАЛ, что и задающая обмотка МУ ЭМС. Обмотки переключаются контактами СКАЛ: при повороте рукоятки СКАЛ в положение «вперед» замыкаются контакты в цепи задающей обмотки ЭМС, при повороте рукоятки СКАЛ в положение «назад» подключается задающая обмотка ЭМТ, а задающая обмотка ЭМС отключается. Для подготовки цепей управления и защиты включаются автоматы В15—В19.
Переключатель устанавливается в положение «ЭМТ», стрела АСП отведена назад, барабан лебедки заторможен.
Нажатием кнопки «пуск» включается реле РЗЛ, которое своим замыкающим контактом включает ВВ2, благодаря чему отключается аварийное торможение. Однако барабан лебедки остается заторможенным ручным тормозом. В исходном положении схемы реле РКТ, РВТ, РКО, РКС и РЗЛ втянуты, вентиль ВВ2 включен, командоаппарат находится в нулевом положении.
Переключатель УП5, имеющий пять положений, установлен в положении желаемой скорости спуска: первое положение — минимальная скорость (для спуска колонны большой массы); пятое положение — максимальная скорость (для спуска колонны малой массы и порожнего талевого блока). Сила тока возбуждения ЭМТ равна нулю, так как управляющие сигналы МУ равны нулю.
Колонна снята с клиньев и удерживается ручным тормозом. Чтобы начался спуск, необходимо растормозить барабан, оставляя рукоятку СКАЛ в нулевом положении. Начальное ускорение колонны при разгоне под действием силы собственного веса велико, так как сила тока возбуждения и момент ЭМТ равны нулю. По мере увеличения скорости начинает действовать положительная обратная связь по скорости (5Н—5К), при этом сила тока возбуждения и тормозной момент увеличиваются. Разгон происходит до тех пор, пока момент тормоза не станет равен моменту от веса колонны, после чего скорость установится. Чем меньше сопротивление резистора РД28, зависящее от положения УП5, тем меньше установившаяся скорость спуска.
При приближении талевого блока к ротору необходимо перевести рукоятку СКАЛ в какое-либо положение «назад», при этом блок-контакты СКАЛ замыкают цепь обмотки 4Н— 4К и по этой цепи протекает ток тем больший, чем больше угол поворота рукоятки СКАЛ. Сила тока возбуждения и момент тормоза увеличиваются, вращения барабана и колонны замедляются до тех пор, пока момент ЭМТ не станет равным моменту веса колонны. С помощью ЭМТ полностью остановить колонну невозможно, поэтому на малой скорости барабан лебедки останавливают вручную механическим тормозом.
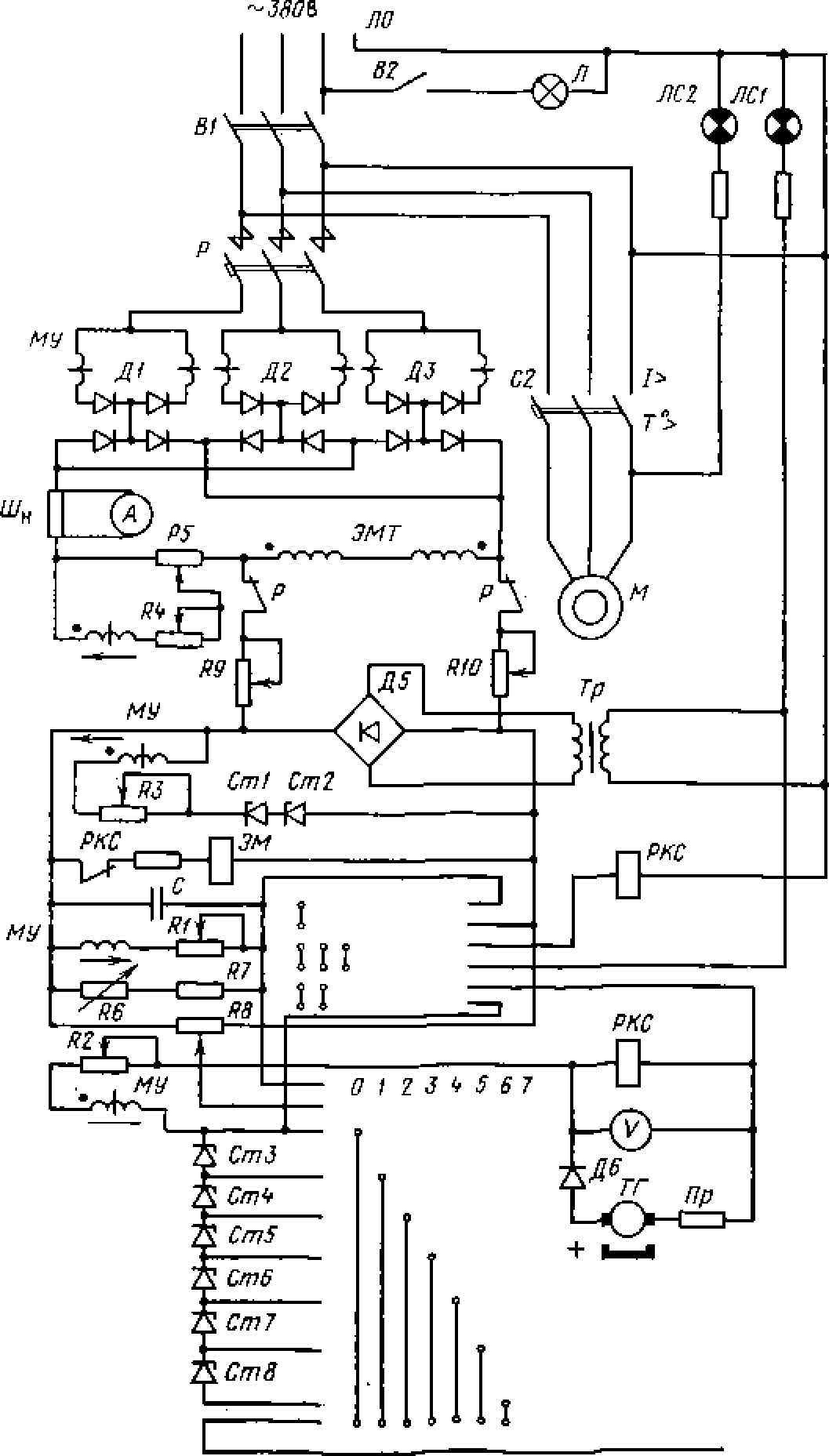
Рис. 118. Схема управления электромагнитным ферропорошковым тормозом ТЭП-4500
После остановки инструмента рукоятка СКАЛ возвращается в прежнее положение. Схемой предусмотрены защиты и блокировки. При срабатывании любой из них реле РЗЛ отключается и размыкает цепь вентиля ВВ2, который автоматически включает механический тормоз на барабан лебедки. Защита и блокировка системы заключаются: в контроле максимальной скорости спуска — якорь реле РАС втягивается, когда скорость движения колонны превысит максимально установленную; контроле охлаждения тормоза — при исчезновении на двигателе м2 насоса охлаждения отключается реле РКО\ контроле напряжения на первичной обмотке трансформатора питания тиристорного преобразователя ЭМТ — при исчезновении тока реле РКТ отключается. Для экстренного торможения инструмента следует нажать кнопку «стоп» на корпусе СКАЛ — в этом случае реле РЗЛ отключается.
Отличие системы управления тормозом ТЭП-4500 от описанной состоит в том, что ферропорошковый тормоз наряду с торможением инструмента при спуске обеспечивает также подачу его за собой в процессе бурения в режиме регулятора подачи долота. Две обмотки возбуждения электромагнитного ферропорошкового тормоза (рис. 118) соединены последовательно и подключены к трехфазному силовому магнитному усилителю через выпрямительный мост. Когда переключатель режима работы тормоза установлен в положении «спуск», схема обеспечивает полуавтоматический режим спуска бурильного инструмента с заданной скоростью аналогично описанной схеме управления электромагнитным индукционным тормозом ЭМТ- 4500. Скорость спуска выбирают при помощи переключателя и стабилитронов Ст3—Ст8 (всего семь ступеней скорости).
При превышении допустимой скорости спуска контактом реле контроля скорости РЛС отключается электропневматический клапан ЭМ, при этом автоматически включается механический тормоз лебедки.
Когда переключатель установлен в положение «бурение», инструмент с малой скоростью плавно подается на забой. Скорость подачи устанавливается вручную посредством регулируемого резистора R6. Схема управления электромагнитным ферропорошковым тормозом предусматривает защиту и блокировку системы, аналогичные защите и блокировке в схеме управления ЭМТ-4500.
Электропривод буровых насосов
При турбинном бурении турбина получает энергию от потока глинистого раствора, нагнетаемого в скважину по трубам насосами.
В бурении применяют поршневые насосы со сменными цилиндровыми втулками, позволяющими в заданных пределах изменять подачу насоса при постоянном числе ходов поршней в 1 мин. Момент, развиваемый на приводном валу, при определенных парметрах бурения связан параболической зависимостью с угловой скоростью этого вала. В начале бурения скважины давление, создаваемое насосом, невелико. По мере углубления скважины вследствие увеличения гидравлического сопротивления бурильных труб увеличивается и давление на выходе насоса, величина которого ограничена условиями прочности деталей насоса. Поэтому, начиная с определенной глубины скважины, ступенчато изменяют подачу насоса сменой цилиндровых втулок.
При таком регулировании электродвигатель в значительной мере недоиспользуется по мощности, поэтому желательно плавно регулировать подачу насоса, что может быть достигнуто применением регулируемого привода насоса. Более полное использование мощности при таком приводе выражается в том, что при той же максимальной величине допустимого давления в системе подача насосов в абсолютном большинстве районов может быть выше, чем при нерегулируемом приводе. Благодаря этому при всех видах бурения улучшается очистка забоя, что приводит к увеличению механической скорости, в результате чего возрастает проходка на долото, сокращается время спуско-подъема, вспомогательных и подготовительно-заключительных операций. При турбинном бурении механическая скорость возрастает вследствие увеличения частоты вращения долота и средней мощности двигателя.
Регулировать подачу насоса необходимо также в осложненных условиях бурения и при восстановлении циркуляции. В качестве приводных двигателей используют синхронные электродвигатели, которые одновременно выполняют функции источников реактивной энергии. Подачу насосов изменяют сменой цилиндровых втулок, а на время восстановления циркуляции уменьшают ее открыванием задвижки на сливе из насоса. Для привода насоса применяют также асинхронный электродвигатель с фазным ротором. В этом случае можно регулировать частоту вращения вала электродвигателя до величины ниже номинальной.
Такое регулирование может быть осуществлено резистором в цепи ротора электродвигателя, однако это связано со значительными потерями энергии. Поэтому в новых буровых установках подачу насосов регулируют изменением частоты вращения асинхронного электродвигателя в схеме электрического каскада. В буровых насосах глубокого бурения подачу насоса регулируют в широких пределах приводом постоянного тока по системе генератор—двигатель (Г—Д) (см. рис. 104).
На рис. 119 представлена принципиальная схема управления синхронным электродвигателем насоса буровой установки 125БЭ.
Условия пуска электродвигателя легкие (момент статического сопротивления на валу электродвигателя составляет около 20 % номинального момента), время разгона 3—4 с, мощность сетей достаточна, поэтому в схеме предусмотрен его прямой пуск с глухоподключенным возбудителем. Управление пуском и остановкой электродвигателя насоса МС — дистанционное посредством переключателя УП4, установленного на пульте в насосном блоке, отключение возможно также с пульта бурильщика переключателем УП4.
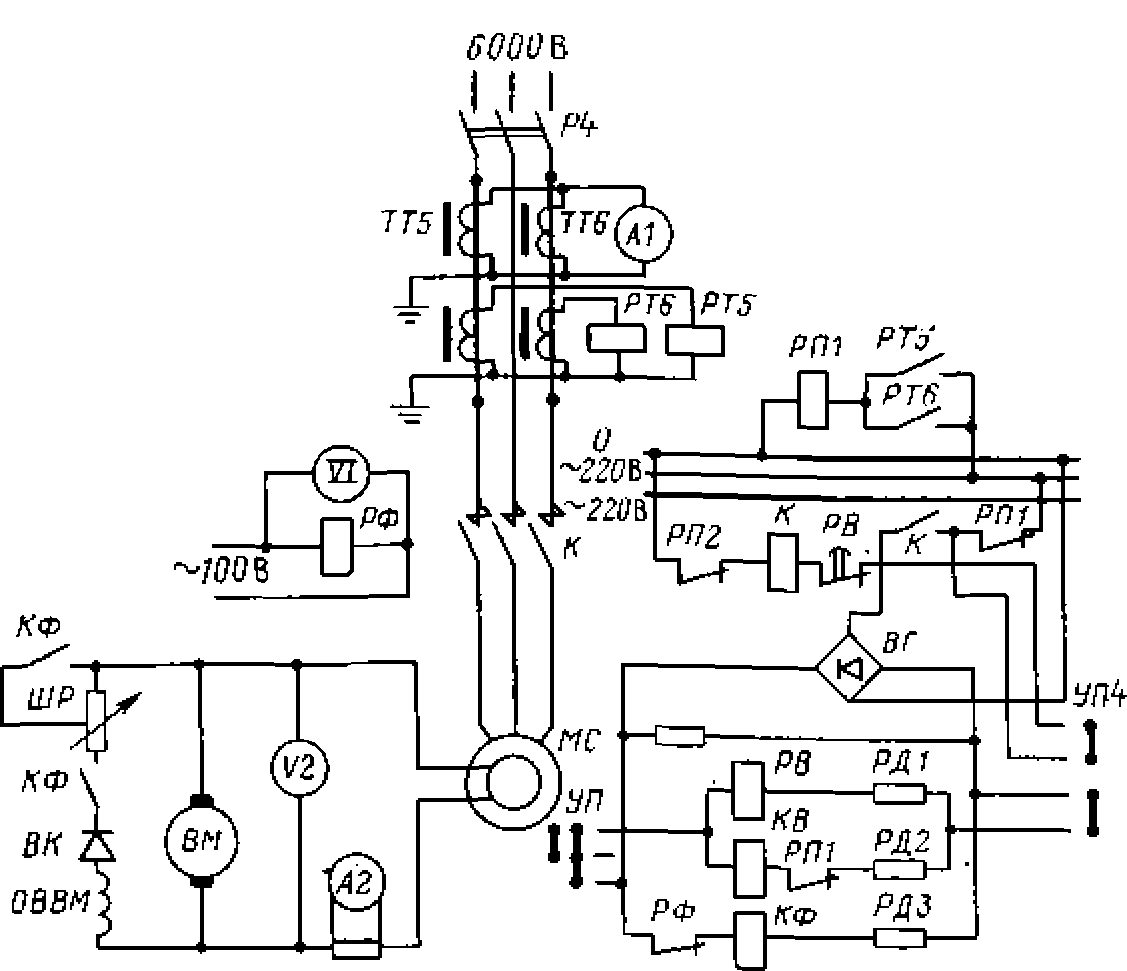
Рис. 119. Схема управления синхронным двигателем бурового насоса установки 125БЭ
При повороте рукоятки УП4 в правое положение включаются реле РВ и контактор КВ, замыкающий цепь обмотки возбуждения ОВВМ возбудителя ВМ на его якорь и включающий свою катушку на самопитание. Реле РВ замыкает цепь катушки контактора высокого напряжения К, который главными контактами подает питание на обмотку статора электродвигателя МС, а блок-контактом включает катушку на самопитание. Начинается асинхронный пуск синхронного электродвигателя.
Напряжение возбудителя ВМ по мере разгона электродвигателя повышается, следовательно, увеличивается его ток возбуждения. При достижении подсинхронной скорости ротор электродвигателя начинает работать в синхронном режиме.
Сила тока возбуждения электродвигателя регулируется реостатом ШР, установленным на пульте. Для повышения устойчивости работы электродвигателя насоса при снижениях напряжения предусмотрено форсирование возбуждения электродвигателя.
Напряжение контролируется реле РФ, которое при снижении напряжения более чем на 15 % отпускает якорь и закрывает свой контакт в цепи катушки контактора форсирования КФ. Последний своим замыкающим контактом шунтирует часть реостата ШР, напряжение возбудителя увеличивается, возрастает ток в обмотке возбуждения ОВВС электродвигателя и, следовательно, увеличивается его максимальный момент.
После восстановления напряжения сети до номинального значения реле РФ вновь включается, и форсировка возбуждения автоматически снимается. Для остановки электродвигателя необходимо повернуть УЛ4 в левое положение, либо УЛ в левое или правое положение. Это приводит к одновременному разрыву цепей катушек контактора КВ и реле РВ. Контактор КВ разрывает цепь обмотки возбуждения возбудителя, обеспечивая гашение поля МС. Реле РВ с выдержкой времени 1,5 с разрывает цепь катушки контактора К и отключает обмотку статора электродвигателя от сети. Электродвигатель от перегрузок и асинхронного режима защищает реле РТ5 и РТ6, которые с выдержкой времени закрывают свои контакты в цепи катушки реле РП1, отключающий контактор К. Размыкающий контактор РП2 осуществляет блокировку, с помощью которой цепь управления МС отключается, если отсутствует напряжение 6 кВ в цепи питания электродвигателя. Для исключения перемагничивания возбудителя при пуске двигателя в цепь обмотки ОВВМ включен диод ВК.
В настоящее время для улучшения эксплуатационных характеристик синхронного электропривода буровых насосов выпускается шкив-муфта ШМ-750, внутри которой встроена электромагнитная ферропорошковая муфта. Применение электромагнитных муфт в приводе насосов позволяет запускать приводной электродвигатель без нагрузки и уменьшать общее число пусков, т. е. устранять основные причины повреждения синхронных электродвигателей.
Буровой насос после запуска электродвигателя пускают плавно как при открытых, так и при закрытых задвижках слива. Использование электромагнитной муфты упрощает обслуживание насосной установки, позволяет медленно поворачивать насос во время ремонта, что облегчает труд слесарей. При работе нескольких насосов можно плавно отключать и подключать отдельные насосы к работающим, равномерно загружать электродвигатели; шкив-муфта, являясь ограничителем момента, защищает синхронный электродвигатель от работы в асинхронном режиме под нагрузкой. Кроме того, синхронный электродвигатель при отключенной муфте можно применять в режиме компенсатора реактивной энергии.
Для привода насосов буровых установок 125Э и 160Э используют асинхронные электродвигатели, работающие одновременно с синхронными, которые могут действовать в режиме компенсации реактивной энергии.
Поэтому при применении асинхронных электродвигателей энергетические характеристики буровой установки не ухудшаются.
Регулирующий привод насосов по системе вентильно-машинного каскада дает возможность использовать мощность насосов во всех режимах бурения, плавно изменяя подачу насосов с увеличением давления. Кроме того, при регулируемом приводе в каждом интервале бурения возможен некоторый оптимальный режим, который может быть реализован при плавном регулировании скорости в небольших пределах.
Электропривод вспомогательных механизмов
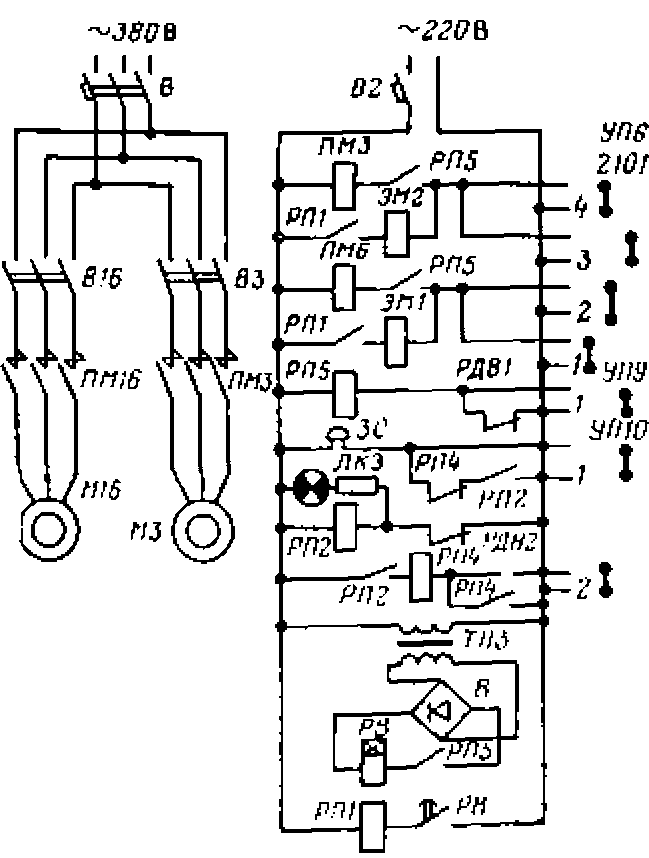
Рис. 120. Схема управления электроприводом компрессора низкого давления
Привод вспомогательных механизмов, в состав которых входят компрессор низкого давления, комплекс механизмов расстановки свечей, грунтоноска, вибросито, топливо-маслосмазка и другие, осуществляется асинхронными электродвигателями с короткозамкнутым ротором напряжением 380 В с дистанционным пуском и остановкой. Вспомогательная лебедка приводится от асинхронного электродвигателя с фазным ротором, В качестве источника питания вспомогательных механизмов на буровых установках с электроприводом служит понижающий трансформатор 6/0,4 кВ мощностью 160 или 250 кВт, от которого питаются и осветительные цепи. При перерыве в электроснабжении буровой установки электродвигатели вспомогательных механизмов питаются от резервной дизельной электростанции.
В схемах управления предусмотрены различные блокировки, обеспечивающие требуемую последовательность включения вспомогательных и главных механизмов. Все электродвигатели вспомогательных механизмов имеют нулевую защиту, защиту от коротких замыканий, перегрузки и однофазного включения, осуществляемую расцепителями автоматических выключателей и тепловыми реле пускателей.
На буровых установках монтируют два компрессора низкого давления для обеспечения пневматической сети установок сжатым воздухом. Привод (рис. 120) компрессора низкого давления осуществляется от асинхронного электродвигателя АО2-91-8 мощностью 40 кВт, частотой вращения вала 750 мин-1 и напряжением 380 В.
Электродвигатели компрессоров включают поворотом рукоятки переключателя УП6, причем при повороте переключателя в правое положение включается электродвигатель м3 компрессора, при повороте переключателя в первое левое положение включается электродвигатель М16, во второе левое положение — электродвигатели обоих компрессоров вместе. В дальнейшем электродвигатели отключаются автоматическим регулятором давления РДВ1, который настраивается таким образом, что отключает привод при достижении давления 0,9 МПа в воздушной магистрали и включает привод при снижении давления в ней до 0,75 МПа.
Для облегчения запуска электродвигателя в этот период в схеме предусмотрена пневматическая разгрузка компрессора. Перед началом работы компрессора катушка реле РВ находится под напряжением — реле втянуто. Своим замыкающим контактом реле РВ включает катушку РП1, замыкающие контакты которого подготавливают катушки ЭМ1 и Эм2 электромагнитных клапанов к включению. Если УП6 установить во второе левое положение, электродвигатели м3 и М16 включаются при условии, что давление в воздушной сети не более 0,75 МПа. При этом электромагниты втянуты, и клапаны соединят выход компрессора с окружающей атмосферой.
Реле времени РВ настраивают на выдержку времени 5 с. За это время электродвигатели успевают без нагрузки развить полную скорость. Затем замыкающий контакт РВ разомкнет цепь катушки РПЦ и катушки ЭМ1 и Эм2 отключаются. Компрессор подключается к воздушной сети. При достижении давления в воздушной сети 0,9 МПа реле РДВ1 своими контактами размыкает цепь катушки реле РП5, которое в свою очередь отключает магнитные пускатели ПМ16 и Пм3. Компрессоры останавливаются. При снижении давления в воздушной сети до 0,75 МПа реле РДВ1 включает своим размыкающим контактом реле РП5, и схема запуска компрессоров повторяется.
Реле давления РДВ2 осуществляет контроль за давлением воздуха в магистрали низкого давления. При нормальном давлении воздуха в магистрали (0,75—0,9 МПа) размыкающий контакт реле РДВ2 в цепи катушки РП2 разомкнут. Реле РП2 не включено.
Если давление в магистрали снижается до 0,74 МПа, размыкающий контакт РДВ2 замыкается, включая аварийный световой сигнал ЛКЗ и катушку реле РП2, которое своим замыкающим контактом включает аварийный звуковой сигнал ЗС. Звуковой сигнал может быть прекращен при помощи имеющегося на пульте универсального переключателя УП10 с самовозвратом в нулевое положение. Поворотом его в левое положение замыкается цепь реле РП4, которое замыкающим контактом ставит свою катушку на самопитание, а размыкающим контактом отключает звуковой сигнал ЗС. При этом световой сигнал остается включенным. После ликвидации аварии при достижении нормального давления в воздушной магистрали размыкающим контактом РДВ2 световой сигнал ЛКЗ и катушка реле РП2 отключаются, при этом звуковой сигнал прекращается.
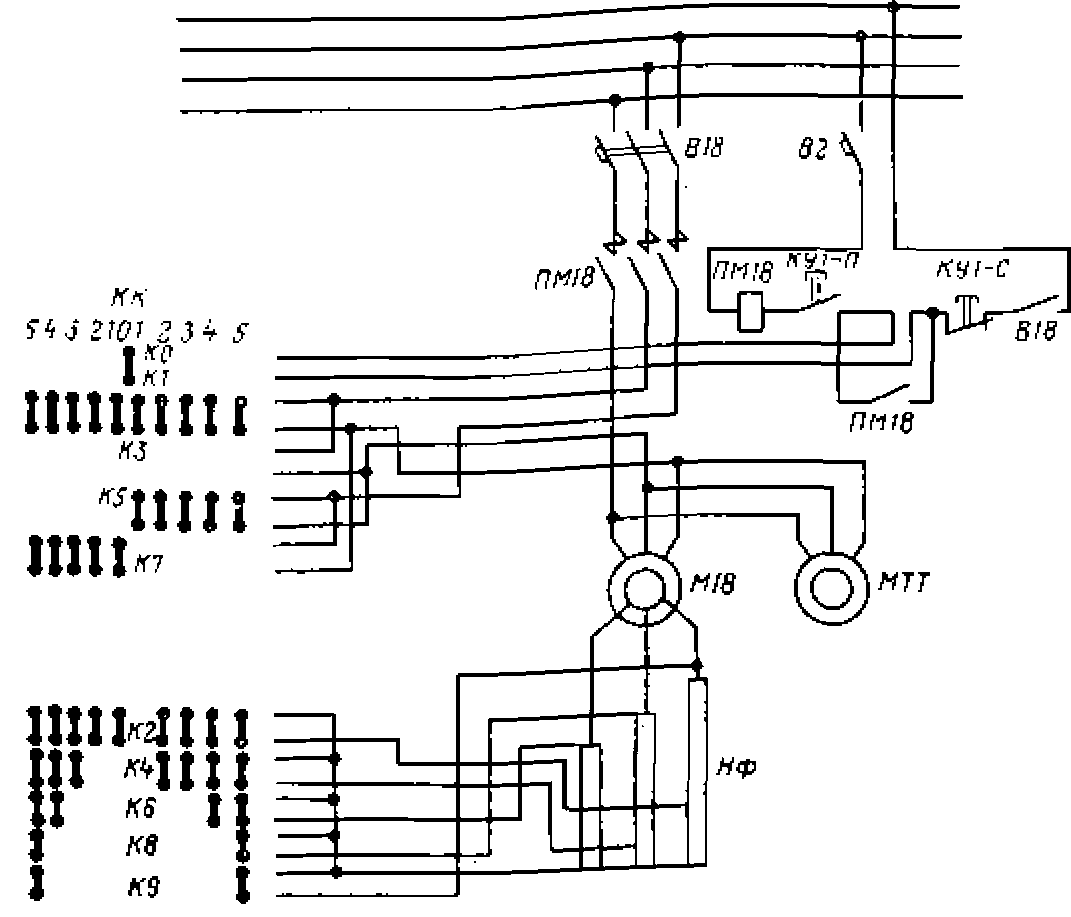
Рис. 121. Схема управления электроприводом вспомогательной лебедки
Привод вспомогательной лебедки осуществляется от кранового асинхронного электродвигателя с фазным ротором МТВ-312-6 мощностью 16 кВт, напряжением 380 В, частотой вращения 960 мин-1.
В схеме управления электроприводом вспомогательной лебедки (рис. 121) для плавного пуска и кратковременного регулирования скорости лебедок в цепь ротора электродвигателя включены пускорегулировочные резисторы НФ.
Для управления цепями статора и ротора электродвигателя служит кулачковый контроллер ККТ-61. Подключение и защита электродвигателя осуществляются автоматом В18 и магнитным пускателем ПМ18. К зажимам статора электродвигателя лебедки подключен электродвигатель тормоза МТТ, который растормаживает лебедку при включении электродвигателя. Электродвигатель лебедки М18 пускают в определенном порядке. При длительной остановке механизма электродвигатель лебедки отключают кнопкой КУ1-С и автоматом В18.
Буровые установки оснащены комплексом механизмов АСП-3 для автоматизации спуско-подъема, позволяющим совмещать развинчивание, свинчивание и перестановку свечей с перемещением порожнего элеватора.
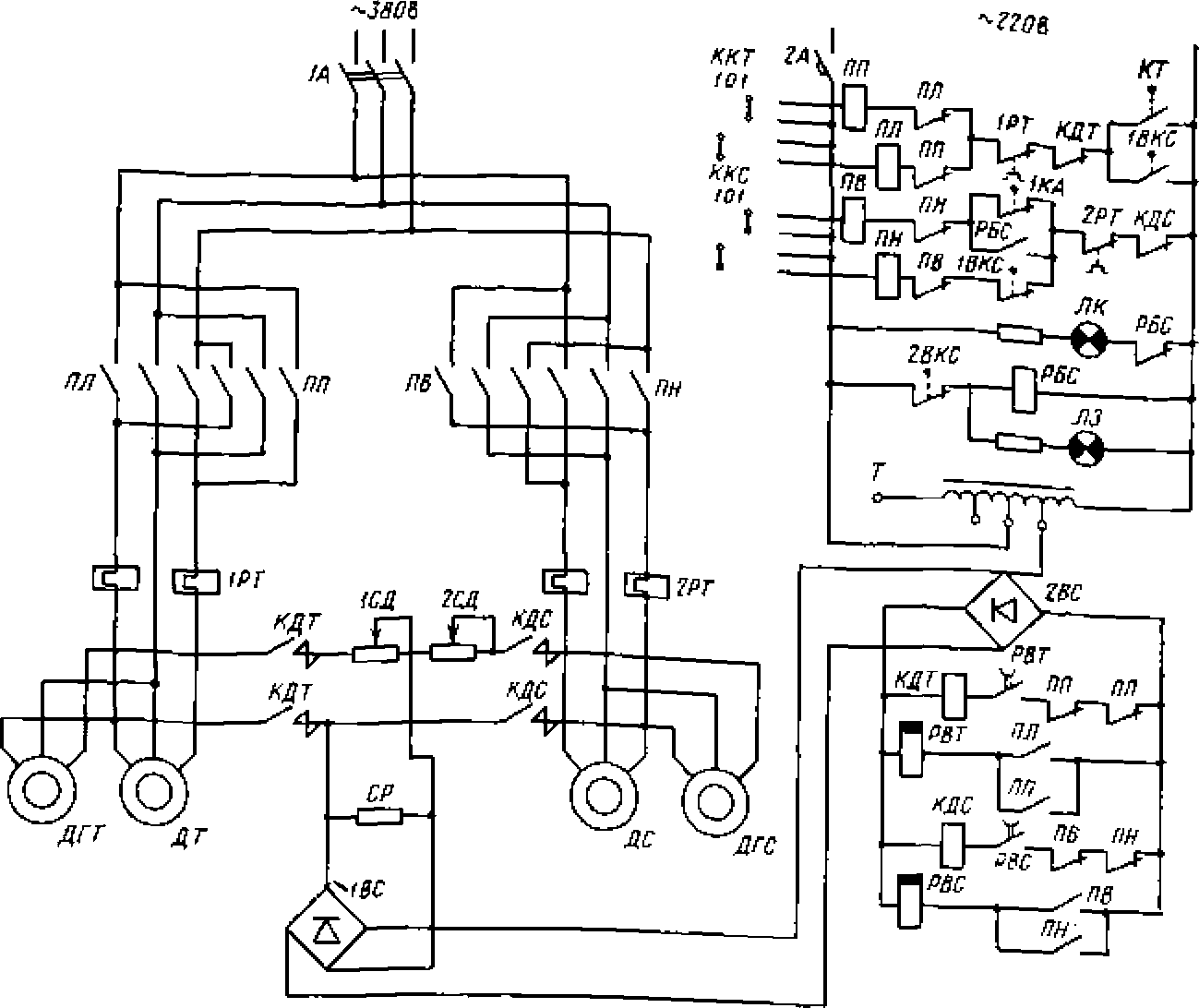
Рис. 122. Схема управления электроприводом механизмов АСП-3
В качестве привода тележки и стрелы АСП-3 (рис. 122) применены электродвигатели МТК-111-6 или МТКЕ-111-6 мощностью 3,5 кВт, напряжением 380 В и частотой вращения 875 мин-1. Ток в цепи управления протекает через автоматический выключатель 2А. Тележка и стрела перемещаются постановкой соответствующего командоаппарата (ККТ или ККС) в нужное положение («вправо» или «влево», «вперед» или «назад»).
Электродвигатели включаются и отключаются реверсивными магнитными пускателями (7777, ПЛ и ПВ, ПН) с тепловыми реле 1РТ и 2РТ. В исходном положении все контакты в цепях пускателей замкнуты, и схема подготовлена к работе. Исходным (нулевым) положением стрелы считается положение, когда тележка находится точно посередине магазинов, а стрела — в крайнем, отведенном от центра скважины положении. Контакт конечного выключателя 1ВКС закрытый.
Для выдвижения стрелы вперед включают командоконтроллер в положение «вперед», т. е. контакт ККС-1 закрывается, включается пускатель ПВ, я двигатель стрелы ДС подключается к сети. В то же время втягивается реле РВС и подготавливается цепь контактора динамического торможения стрелы КДС к включению. Стрела выдвигается до упора в свечу. Затем устанавливают ККС в нулевое положение, пускатель ПВ отпадает, отключая двигатель ДС от сети. Контактор КДС включается и замыкает цепь питания обмотки статора ДС.
По цепи от выпрямителя 1ВС протекает выпрямленный ток. При этом происходит динамическое торможение электродвигателя. Интенсивность торможения можно регулировать резистором 2СД. Реле времени РВС настраивается на выдержку 1—2 с при отключении, после чего его контакт отключает контактор КДС. Схема управления тележкой подобна схеме управления стрелкой.
В цепях управления стрелкой и тележкой имеются блокировки, которые не допускают одновременного включения пускателей ПП и ПЛ; ПВ и ПН; ПП, ПЛ и КДТ; ПВ, ПН и КДС, а также блокировки от возможных механических повреждений, например, удара талевого блока по стреле. Система блокируется при помощи конечных выключателей стрелы 1ВКС и 2ВКС и путевого командоаппарата КА, фиксирующего положение талевого блока. Конечный выключатель 1ВКС срабатывает, когда стрела полностью убрана от центра скважины, 2ВКС — когда стрела выдвинута на 1,5 м от нулевого положения. Контакты командоаппарата замкнуты; 1КА — если талевый блок находится на расстоянии не более 26 м от ротора; 2КА — если талевый блок находится на расстоянии не более 20 м от ротора.