§ 2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДОВ И ИХ РЕГУЛИРОВОЧНЫЕ СВОЙСТВА
Механические характеристики
Знание механической характеристики двигателя и механизма необходимо для того, чтобы правильно подобрать двигатель для какого-либо конкретного привода. При выборе электродвигателя для электропривода, а также для обеспечения рациональной эксплуатации всего агрегата в целом следует обращать внимание на соответствие механических свойств двигателя характеристикам рабочей машины.
Зависимость между частотой вращения п и моментом сопротивления механизма Мс называется механической характеристикой производственного механизма. Она выражается графически в виде кривой![]()
Механической характеристикой электродвигателя называется зависимость между частотой вращения электродвигателя п и вращающим моментом М:![]()
Таким образом, механическая характеристика электродвигателя отвечает на вопрос: как будет себя вести двигатель при изменении нагрузки на его валу?
Один и тот же двигатель может иметь несколько механических характеристик. Это зависит от схемы включения сопротивлений в цепи якоря, ротора или его обмотки возбуждения.
По механическим характеристикам электродвигатели разделяются на следующие группы:
- двигатели с постоянной частотой вращения, у которых частота вращения не зависит от нагрузки на валу; к ним относятся синхронные двигатели. Характеристика этих двигателей называется «сверхжесткой» (I, рис. 103, а);
- двигатели, частота вращения которых при изменении нагрузки изменяется незначительно. К ним относятся асинхронные двигатели, двигатели постоянного тока с параллельным возбуждением. Характеристика этих двигателей называется «жесткой» или шунтовой (II, рис. 103, а);
- двигатели, частота вращения которых в сильной степени зависит от нагрузки, причем увеличение нагрузки соответствует уменьшению частоты вращения, и наоборот. Такую характеристику имеют двигатели постоянного тока с последовательным возбуждением. Характеристика этих двигателей — «мягкая» или сериесная (III, рис. 103, а);
- двигатели с несколькими ступенями частоты вращения, работающие на каждой ступени скорости или по «жесткой» характеристике (короткозамкнутые двигатели с изменением числа пар полюсов), или при постоянной скорости (синхронный двигатель с изменением числа пар полюсов).
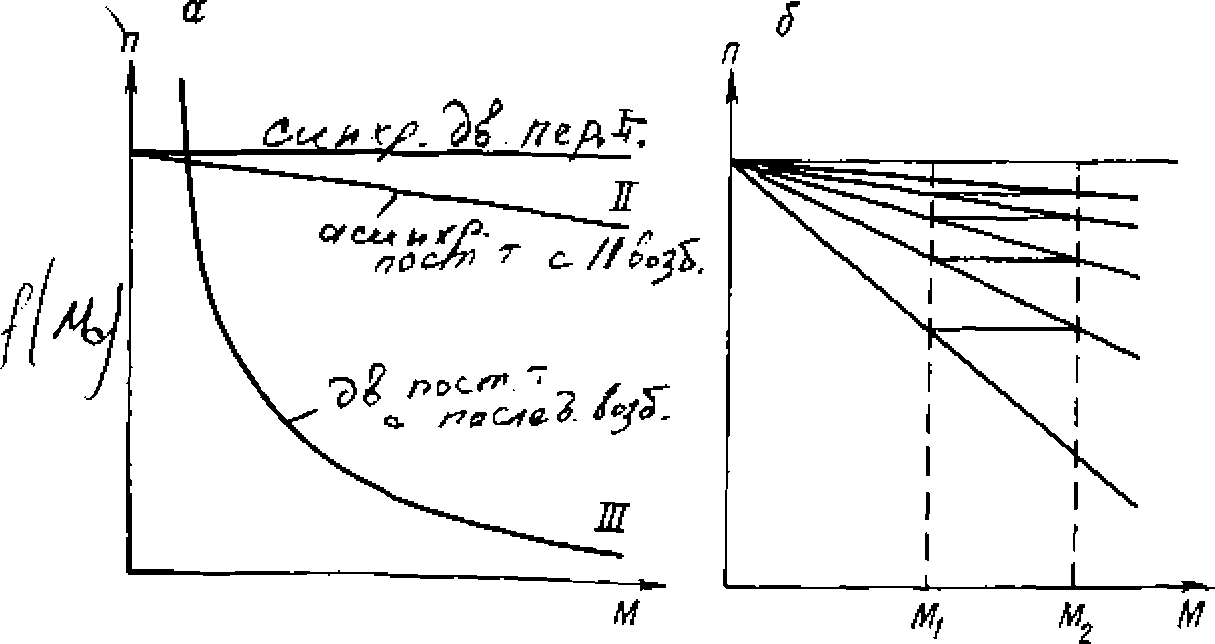
Рис. 103. Механические характеристики электродвигателей:
а — синхронные, асинхронные с коротко замкнутым ротором и двигатели тока; б — асинхронные двигатели с контактными кольцами
Такие двигатели получили название многоскоростных;
- двигатели с регулированием частоты вращения, которую можно изменять для одной и той же нагрузки в некоторых пределах, как, например, у асинхронных двигателей с контактными кольцами (рис. 103, б).
Регулировочные свойства электродвигателей
Регулировочные свойства различных электродвигателей, работающих в качестве привода механизмов и машин, зависят от их механических характеристик и конструктивных особенностей электродвигателей.
Как следует из выражения (70), приведенного в гл. III, частота вращения двигателей постоянного тока п может меняться в зависимости от изменения величины сопротивления в цепи якоря или магнитного потока обмотки возбуждения Ф.
Для асинхронных электродвигателей частота вращения ротора может меняться согласно выражению (65) путем изменения активного сопротивления в цепи ротора, переключением числа полюсов обмотки статора, изменением частоты тока, питающего их.
Для плавного регулирования частоты вращения двигателя постоянного тока в широких пределах применяют системы генератор-двигатель (рис. 104). В качестве первичного двигателя может быть использован синхронный или асинхронный электродвигатель. Обмотки возбуждения генератора Г и приводного двигателя Д, как следует из схемы, питаются от отдельного возбудителя В, а обмотка якоря приводного двигателя — непосредственно, без пусковых реостатов, питается от генератора Г Напряжение на зажимах генератора Г регулируют изменением тока возбуждения. В момент пуска двигателя Д напряжение устанавливают небольшим, что исключает надобность в пусковом реостате. Таким образом, в данной схеме отсутствуют реостаты в цепи регулируемого двигателя, а следовательно, потери в них.

Основное достоинство этой схемы — возможность экономического регулирования частоты вращения в широких пределах. Пределы регулирования, достигаемые изменением подводимого напряжения, составляют (6-8) 1.
На рис. 104, б приведены механические характеристики системы генератор—двигатель. Они представляют собой прямые линии, параллельные друг другу.
Способы торможения электроприводов
В процессе работы различных электроприводов возникает необходимость в искусственном торможении.
Кроме сокращения времени останова, торможение электроприводов может преследовать:
- сохранение постоянства скорости, что имеет место в тех случаях, когда привод стремится и способен развивать ускоренное движение под влиянием, например, опускаемого груза;
- снижение скорости при переходе от одной рабочей скорости на другую.
Торможение электроприводов возможно механическое или электрическое.
Механическое торможение на практике получило значительное распространение и широко применяется в бурильных лебедках, При механическом торможении тормозной момент создается силами трения в колодке или ленте при нажатии последних на специальный обод.
Механическое торможение имеет ряд недостатков, к которым относятся: интенсивный нагрев колодок, быстрый их износ и вследствие этого необходимость в частых регулировках тормозных усилий.
При электрическом торможении тормозной момент на валу привода создается приводным электродвигателем. Применяются три способа электрического торможения: генераторное, торможение противовключением, динамическое торможение (рис. 105).
Генераторное торможение используется при спуске груза, когда подъемный двигатель под влиянием момента, развиваемого опускающимся грузом, вращается с частотой выше номинальной и работает в режиме генератора, отдавая энергию в сеть (рис. 105, б).
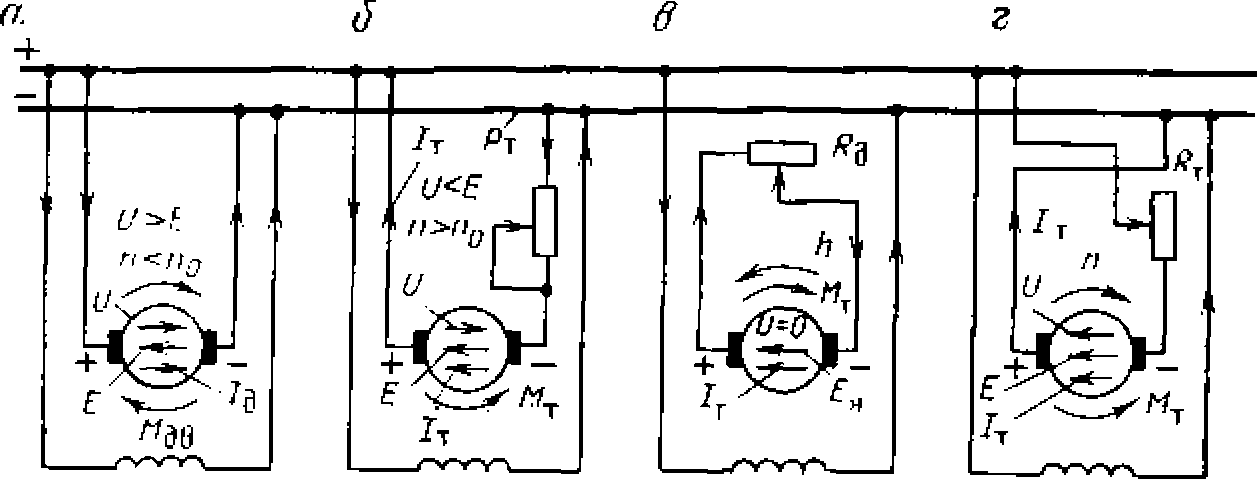
Рис. 105. Схемы торможения электродвигателей постоянного тока параллельного возбуждения:
а — двигательный режим; б — генераторное торможение; в — динамическое торможение; г — торможение противовключением
Торможение противовключением осуществляется изменением направления тока в обмотке якоря электродвигателя постоянного тока или направления вращения магнитного поля статора асинхронного двигателя (рис. 103, г).
Таким образом, в режиме торможения противовключением электродвигатель подключается к сети так, чтобы был создан вращающий момент, противоположный моменту, создаваемому инерцией рабочего механизма. Торможение противовключением сопровождается увеличением тока якоря в двигателях постоянного тока и тока статора асинхронного двигателя. Торможение противовключением применяется для ускорения остановки механизма или для получения заданной скорости спуска (в подъемных установках), когда двигатель включается на вращение в сторону спуска.
К недостаткам торможения противовключением относятся: необходимость использования больших сопротивлений для ограничения тока в обмотках двигателя, тяжелый тепловой режим двигателя.
Динамическое торможение в электроприводе с двигателями постоянного тока осуществляется отключением обмотки якоря от электрической сети и подключением ее на время торможения к специальному тормозному активному сопротивлению, но при обязательном сохранении возбуждения. В цепи якоря электродвигателя, вращающегося по инерции в магнитном поле, возникает э. д. с., под действием которой в обмотке якоря и тормозном сопротивлении протекает ток. Электродвигатель работает в качестве генератора, а механическая система — как двигатель за счет запасенной кинетической энергии.
В рассматриваемой системе э. д.с. возникает при любой скорости, следовательно, в течение всего времени торможения электродвигатель работает как генератор, выполняя роль тормоза. Э.д. с. якоря при этом уменьшается пропорционально снижению частоты вращения, так как магнитный поток Ф остается постоянным (рис. 105, в).
Динамическое торможение асинхронных двигателей осуществляется двумя способами: 1) возбуждением пульсирующего магнитного поля в статоре путем присоединения статора только к двум фазам сети (рис. 106, а); 2) питанием статора от источника постоянного тока после отключения статора от сети переменного тока (рис. 106, б).
Первый способ применяется в крановых установках при опускании груза. Он заключается в том, что на время торможения обмотка статора подключается только к двум фазам сети. При этом в статоре создается пульсирующее магнитное поле, которое пересекается ротором, вращающимся под действием веса груза. В обмотке ротора возникает ток, который взаимодействует с магнитным полем, и в результате создается тормозной момент.
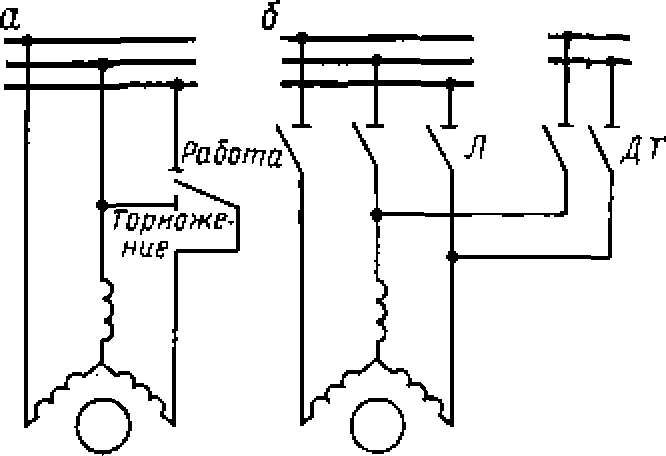
Рис. 106. Динамическое торможение асинхронных двигателей:
Л — линейный аппарат; ДТ — аппарат включения цепи постоянного тока
Второй способ динамического торможения асинхронных двигателей применяется чаще. После отключения подается постоянный ток.
При пересечении ротором, вращающимся по инерции, неподвижного в пространстве магнитного поля, созданного постоянным током, в обмотке ротора наводится переменный ток. Взаимодействие переменного тока с полем статора создает тормозной момент.
Недостаток этого способа торможения состоит в том, что необходимо иметь отдельный источник постоянного тока.
Для синхронного двигателя применяется как генераторное, так и динамическое торможение. Если статор синхронного двигателя отключить от сети и замкнуть его обмотку на сопротивление, а питание обмотки возбуждения сохранить, то можно получить динамическое торможение, так как возникает тормозной момент от взаимодействия тока статора с магнитным потоком ротора.
Таблица 23
Технические характеристики электродвигателей буровой лебедки
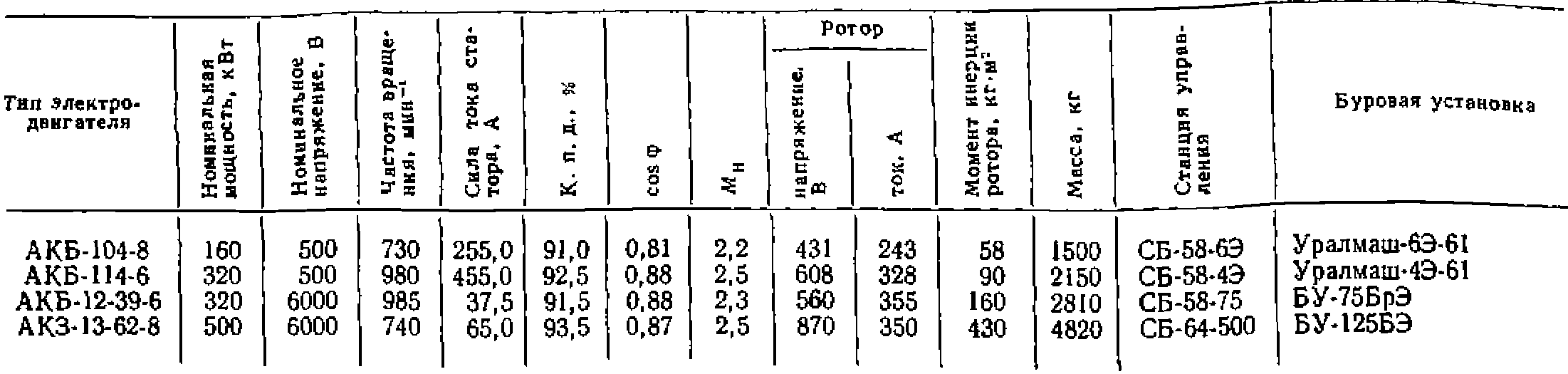
Таблица 24
Технические характеристики электродвигателей для буровых лебедок и ротора

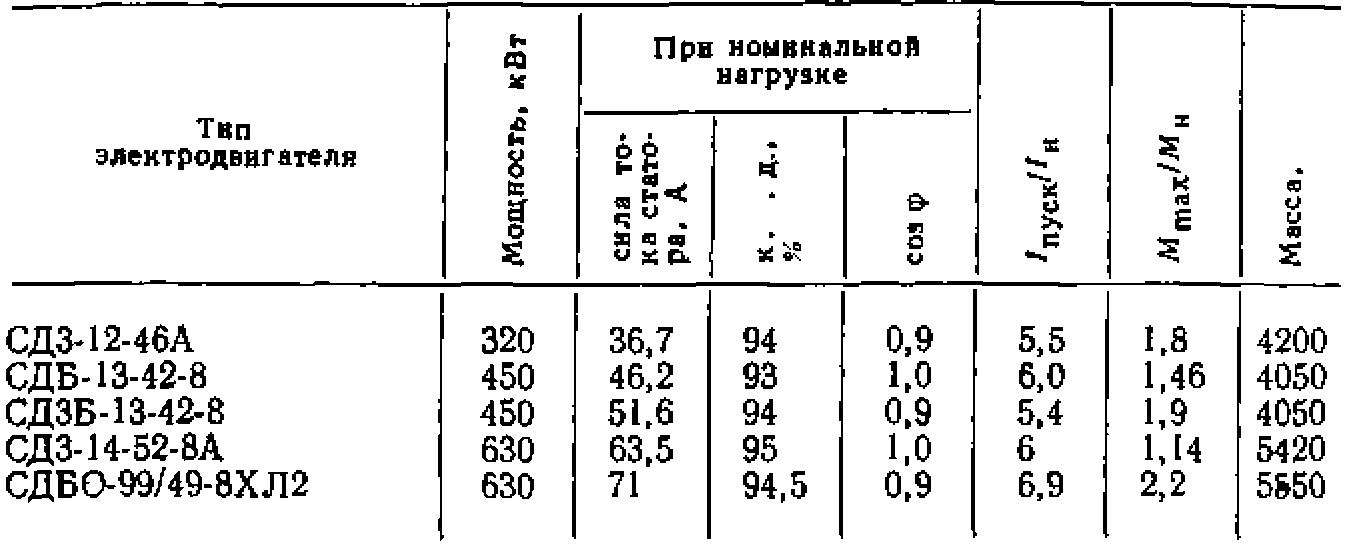
Таблица 25
Технические характеристики синхронных электродвигателей для буровых насосов напряжением 6 кВ