Электродвигатели постоянного тока состоят из неподвижной части с электромагнитами, на полюсах которых расположена обмотка возбуждения, и вращающейся части — якорем с обмоткой и коллектором, на который выведены ответвления от обмотки якоря. В зависимости от принятой схемы питания обмоток возбуждения электромагнитов машины постоянного тока разделяются на машины с последовательным, параллельным и смешанным возбуждениями (рис. 8). При подаче напряжения постоянного тока от постороннего источника через щетки в обмотку якоря одновременно подается напряжение и в обмотку возбуждения ОВ электромагнитов. При этом в магнитной системе возникает магнитный поток, который, взаимодействуя с током якоря, образует вращающий момент и приводит во вращение якорь машины. Ток возбуждения и ток якоря регулируется реостатами РВ и РП.
Электродвигатели постоянного тока допускают широкое регулирование угловой скорости (частоты вращения), поэтому их применяют главным образом в тех случаях, когда по условиям работы приводимого механизма требуется изменение угловой скорости (частоты вращения).

Рис. 9. Механические характеристики электродвигателей постоянного тока
Механические характеристики электродвигателей постоянного тока изображены на рис. 9. Как видно из характеристики 1, угловая скорость двигателя с последовательным возбуждением резко изменяется с изменением нагрузки. Двигатель может принять большую перегрузку, но при этом сильно снижает свою угловую скорость; при значительном уменьшении нагрузки (момента) скорость двигателя может настолько возрасти, что появится опасность его разрушения. Угловая скорость двигателя с параллельным возбуждением при изменении нагрузки меняется незначительно (характеристика 3). Характеристика 2 относится к двигателям со смешанным возбуждением.
При пуске электродвигателя в его якоре возникает большой пусковой ток, превышающий нормальный в 8—15 раз. Для ограничения пусковых токов в цепь якоря вводят регулируемое сопротивление (реостат) РП (см. рис. 8), значение которого подбирается таким образом, чтобы пусковой ток не превышал номинальный больше, чем в 1,5—2 раза. Пуск электродвигателя осуществляют с полностью введенным сопротивлением реостата в цепи возбуждения — при этих условиях пусковой ток будет иметь наименьшее значение. По мере разгона двигателя реостат РП выводится.
Реверсирование (изменение направления вращения) достигается переменой концов питающих проводов на клеммах у обмотки якоря или обмотки возбуждения.
Регулирование угловой скорости электродвигателей постоянного тока осуществляют введением добавочного сопротивления РП в цепь якоря (см. рис. 8), изменением магнитного потока или изменением подводимого напряжения. При введении в цепь якоря добавочного сопротивления угловая скорость уменьшается с увеличением сопротивления. Так как через сопротивление проходит полный ток якоря, то этот способ регулирования связан с большими потерями электроэнергии.
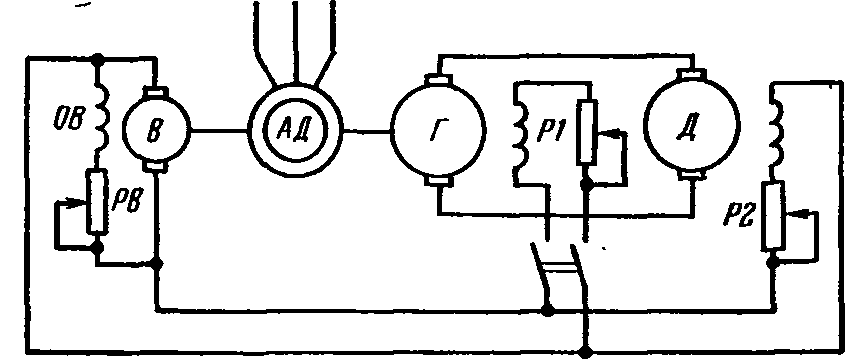
Рис. 10. Система генератор-двигатель для регулирования возбуждения
Регулирование скорости изменением магнитного потока у двигателей с последовательным возбуждением выполняют при помощи реостата РВ, установленного параллельно обмотке возбуждения; у двигателей с параллельным возбуждением — реостатом РВ в цепи возбуждения, и у двигателей со смешанным возбуждением — обоими реостатами РВ (в цепях последовательного и параллельного возбуждений). Так как при этом способе поток может только уменьшаться, то согласно формуле (34) угловая скорость двигателя может быть изменена только в сторону увеличения по отношению к номинальной.
Для регулирования угловой скорости изменением подводимого к якорю напряжения необходимы дополнительные устройства, изменяющие напряжения в необходимых пределах. Наиболее часто для этой цели используют систему генератор — двигатель (сокращенно Г—Д). Напряжение к двигателю Д (рис. 10), угловую скорость которого необходимо регулировать, подается от генератора постоянного тока Г, приводимого в движение асинхронным двигателем трехфазного тока АД. Для питания обмоток возбуждения генератора Г и двигателя Д служит отдельный возбудитель В с обмоткой возбуждения ОВ и реостатом возбуждения РВ. Уменьшение скорости двигателя Д достигается изменением тока возбуждения генератора реостатом Р1; увеличение угловой скорости выше номинальной — изменением тока возбуждения генератора реостатом Р2.