Контроль скорости осуществляется с помощью различных тахогенераторов (см. § 4-3), стационарно смонтированных на приводах. Для осциллографирования удобнее пользоваться тахогенераторами постоянного тока. В качестве датчиков скорости могут быть приспособлены небольшие машины, присоединяемые к вращающимся валам вручную — подобно тахометрам.
При фрикционном подсоединении в случае резких изменений скорости возможно проскальзывание тахогенератора; кроме того, в пределах одного оборота показания тахогенератора зависят от углового и параллельного смещений его оси. Среднее значение показаний не зависит от положения оси вала.
Осциллографирование скорости принципиально не отличается от регистрации напряжений генератора, имеющего постоянную скорость, но переменные возбуждение и нагрузку. Во многих случаях при работе с автоматическими регуляторами требуется оценить весьма незначительные изменения скорости, составляющие только доли процента. Такие небольшие изменения контролируемой величины могут быть оценены только дифференциальным путем. Схема включения аппаратуры приведена на рис. 4-16. Как было указано в § 4-3, для предохранения гальванометров при работе с дифференциальной схемой требуется особая осторожность. На рис. 4-16,б показана осциллограмма изменения скорости
∆п прокатного двигателя в момент входа металла в валки. Двигатель питается от управляемого ртутного выпрямителя. На рис. 4-16,в дана та же осциллограмма, но при включении конденсатора С, сглаживающего зубцовые пульсации измеряемого напряжения.
Для повышения чувствительности и защиты вибратора на входе светолучевого осциллографа может быть включена электронная приставка, являющаяся усилителем постоянного тока с максимальной отсечкой.

Рис. 5-19. Схемы осциллографирования скорости при помощи стандартных усилителей системы УБСР.
В практике наладочных работ для осциллографирования малых измерений скорости успешно используются стандартные усилительные блоки системы УБСР (рис. 5-19). Напряжение от тахогенератора ТГ через фильтр RC (100 ком, 0,25 мкф) и сопротивление 100 ком подается на вход линейного электронного усилителя типа УПТ1. На выходе усилителя имеется дополнительный низковольтный фильтр RC (120 ом, 15 мкф); постоянные фильтров не превышают 0,025 сек. На вход УПТ1 через резистор 10 ком подается также стабилизированное независимое напряжение.
При установившейся скорости с помощью потенциометра П1 создается баланс сравниваемых напряжений; контроль уровня выходного напряжения производится по вольтметру V. Схема дает возможность оценить изменения выходного напряжения, усиленные в 50—200 раз. Гальванометр осциллографа (например, типа М001.3) включается через потенциометр П2 и резистор Rд.
На рис. 5-19,б показано использование стандартного усилителя типа ДТ1 для осциллографирования тока двигателя.

Рис. 5-20. Схемы включения осциллографических гальванометров при определении ускорений.
Изменение скорости во времени dn/dt определяет величину ускорений. Ускорения могут быть рассчитаны по тангенсам касательных к кривой скорости. Осциллограмма ускорений снимается при помощи дифференцирующего трансформатора или емкости (рис. 5-20). В схеме с трансформатором Тр большая часть (90— 95%) напряжения ТГ должна падать на добавочном сопротивлении R1. При этом величина контролируемой скорости га и ее изменение будут пропорциональны току iт
![]()
где К1, К2, К3 — коэффициенты пропорциональности.
Электродвижущая сила е вторичной обмотки трансформатора определяется изменением потока Ф или тока iт
![]()
Контролируемый гальванометром Г ток пропорционален изменению скорости
![]()
где Кв, Кт — коэффициенты передачи.
Градуировку гальванометра ускорения наиболее точно можно произвести путем подачи линейно возрастающего напряжения на зажимы 1—2.

Рис. 5-21. Осциллограммы скоростей и ускорений механизмов с ударным приложением нагрузки.
а —толкатель блюминга; б — зажим коксовыталкиватели; п — скорость; а — ускорение.
Для этой цели удобно использовать интегратор, включаемый по схеме
рис. 5-8. Можно воспользоваться также кривой намагничивания генератора во времени Uг=f(t), производя опыт включения обмотки возбуждения на постоянное напряжение. При использовании отсоединенного тахогенератора градуировка гальванометра может быть произведена с помощью падающего груза (см. рис. 5-5,а). Искомое ускорение а в данном случае находится расчетным путем
![]()
На рис. 5-21 для иллюстрации даны примерные осциллограммы скоростей п и ускорений а механизмов толкателя блюминга и зажима коксовыталкивателя.
5-6. Измерение скорости и скольжения
Для измерения скоростей вращения электрических машин используются механические тахометры, тахогенераторы, счетчики импульсов и различные стробоскопические устройства.
Обычные механические тахометры, периодически контролируемые на испытательных установках, имеют погрешность показаний 1—3%. При известном опыте с помощью тахометра можно уловить изменение скорости на 0,5%. Тахогенераторы в комплекте со щитовыми измерительными приборами класса 1 дают точность показаний 1,5—3%; при тщательной градуировке и работе с лабораторными вольтметрами класса 0,2 может быть получена точность показаний до 0,5%.
По стабильности характеристик наиболее совершенными являются тахогенераторы индукторного типа, так как на их показания мало влияют величины возбуждения, температура, магнитные поля двигателя и износ [Л. 22]. В тех случаях, когда требуется иметь данные о величине скорости вращения с погрешностью не более 0,1—0,5%, следует прибегать к счетным методам измерения [Л. 37].
При производстве наладочных работ, как правило, величины скорости достаточно оценивать с точностью до 1—2%, но часто требуется определить статические посадки скорости, составляющие доли процента. Такие величины могут быть измерены только дифференциальным методом (см. рис. 4-16 и 5-19).
Можно рекомендовать освоение стробоскопических методов измерения скоростей. Имеются различные типовые стробоскопы (см. § 1-4); стробоскопическое измерение может быть выполнено также простыми средствами, всегда имеющимися в распоряжении наладчиков. Для этого на валу двигателя укрепляется диск с нанесенными концентрическими кольцами (рис. 5-22), разделенными на темные и светлые участки. Если при вращении двигателя освещать диск неоновой лампой или иной лампой, вспыхивающей с частотой напряжения сети, то неподвижными будут казаться те кольца, у которых при данной скорости темные и светлые участки чередуются с частотой сети (или с частотой кратной, т. е. в 2—3 раза большей чем частота сети).

Рис. 5-22. Диски для измерения скорости стробоскопическим методом.
а — при скорости вращения вала до 6 000 об/мин; б — то же, но до 1000 об/мин.
Скорость вращения вала п, соответствующая кажущемуся неподвижному состоянию кольца, может быть вычислена по соотношению
![]()
где f— частота сети, равная 50 Гц,
К — число затемненных участков данного кольца.

Рис. 5-23. Использование неоновой лампы для освещения диска стробоскопа.
a— схема включения; б — характеристики напряжений на участках схемы.
Для получения более четкого изображения неоновую лампу НЛ целесообразно включать через небольшой насыщающийся трансформатор НТ и вентиль В по схеме, приведенной на рис. 5-23,а.
При таком включении длительность горения лампы значительно меньше длительности паузы (рис. 5-23,б).
В этом случае скорость вращения вала п определяется по формуле
n= 3 000/K. Во избежание ошибки порядок величины скорости рекомендуется определить с помощью тахометра.
Если нет возможности отрегулировать скорость привода таким образом, чтобы одно из колец казалось неподвижным, то уточнение можно внести, подсчитав, сколько затемненных участков одного из колец пройдет мимо неподвижной точки за определенный отрезок времени. Для уяснения рассмотрим следующий пример.
Стробоскопический метод удобен для определения скольжения асинхронных двигателей по отношению к синхронной скорости. Скольжение s лежит обычно в пределах 1—5%. При определении скольжения вместо применения специального диска достаточно на поверхность соединительной муфты параллельно оси равномерно нанести мелом ряд полос по числу полюсов двигателя.
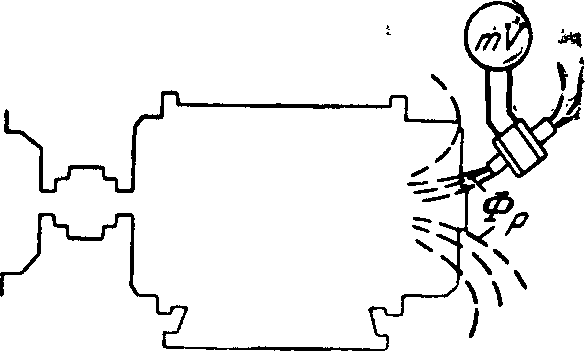
Рис. 5-24. Измерение скольжения ротора асинхронного двигателя с помощью индукционной катушки.
Во время вращения двигателя нанесенные на муфте меловые полосы совершенно незаметны, но при подсвечивании неоновой лампой создается впечатление, что они медленно вращаются в сторону, противоположную ходу ротора. Скорость вращения полос пропорциональна разности между частотой мигания неоновой лампы и скоростью вращения муфты двигателя.
Определив время t, сек, за которое мимо неподвижной точки проходит т полос, можно подсчитать сколько
![]() (5-31)
(5-31)
где f — частота сети.
При нормальной промышленной частоте f—50 Гц
s%=m/t.
Пример. Допустим, что за 12 сек мимо неподвижной точки прошло 30 полос. Тогда![]()
Второй способ определения величины скольжения основан на контроле скорости вращения потоков рассеяния ротора Фр, которые с частотой, пропорциональной скольжению, пересекают витки индукционной катушки (рис. 5-24). Для проведения испытания к выводам катушки подключается чувствительный милливольтметр (желательно с нулем посредине шкалы); катушка располагается у конца вала ротора, а затем путем поворачивания ее в разные стороны отыскивается положение, при котором наблюдаются максимальные колебания стрелки прибора. По числу полных колебаний К за t сек рассчитывается величина скольжения
![]()
Удобно отсчитать 50 полных колебаний и по секундомеру засечь время, тогда![]()
В качестве индукционной катушки можно использовать катушку реле или контактора постоянного тока, имеющую 10—20 тыс. витков (или намотать катушку с числом витков не менее 3 000). Внутрь катушки для усиления магнитного потока вставляется сердечник, набираемый из нескольких полос трансформаторной стали. Метод индукционной катушки применим для всех видов машин и является наиболее удобным.
У двигателей с фазным ротором, помимо способов, описанных выше, скольжение может быть определено с помощью магнитоэлектрического амперметра, включаемого в одну из фаз ротора, а при наличии невыключаемого сопротивления — с помощью вольтметра, присоединяемого к кольцам ротора. Рекомендуется применять приборы с двусторонней шкалой. Скольжение рассчитывается по числу полных колебаний стрелки прибора, так же как гари методе с индукционной катушкой.
Литература
- Справочник по электроустановкам промышленных предприятий, т. 3, Наладка электроустановок, изд-во «Энергия», 1965.
- Кофман К. Д·, Справочник электромонтера, изд-во «Энергия», 1967.
- Алексеев А. Г., Б а юшки н С. Н., Маркелов В. В., Небесный А. Д., Справочник по специальным работам для производителя электромонтажных работ, Стройиздат, 1968.
- Дренов П. В., Справочник по ремонту электрических машин, изд-во «Техника», 1964.
- Электротехнический справочник, под ред. профессоров МЭИ, т. 3, изд-во «Энергия», 1966.
- Бондаренко В. П., Плетни к М. И., Справочник электромонтажника, изд-во «Будiвельнiк», 1967.
- Справочные данные по электрооборудованию, т. 1 и 2, Электрические машины, ВНИИметмаш, изд-во «Энергия», 1964, 1965.
- ГОСТ 183-66, Машины электрические, общие технические требования, методы испытаний.
- Жерве Г. К·, Руководство для электромонтеров по испытанию электрических машин, Госэнергоиздат, 1955.
- Правила устройства электроустановок (ПУЭ), гл. 1-1 «Общие правила», гл. 1—8 «Объемы и нормы приемо-сдаточных испытаний», изд-во «Энергия», 1966.
- Сборник правил техники безопасности при производстве электромонтажных работ, изд-во «Энергия», 1964.
- Завалишин Д. А., Электрические машины малой мощности, Госэнергоиздат, 1963.
- Чечет Ю. С., Электрические микромашины автоматических устройств, изд-во «Энергия», 1964.
- Тун А. Я., Тахогенераторы для систем управления электроприводами, изд-во «Энергия», 1966.
- Армейский Е. В., Фалк Г. Б., Электрические микромашины, изд-во «Высшая школа», 1968.
- Андреев Б. П. С а б и и и и Ю. А., Основы электропривода, Госэнергоиздат, 1963.
- Васильев С. Е., Забарский Б. М., Забокрицкий Е. И., Справочник по наладке электроустановок и электроавтоматики, изд-во «Наукова думка», 1966.
- Минин Г. П., Мегомметр, изд-во «Энергия», 1966.
- Правила технической эксплуатации и безопасности обслуживания электроустановок промышленных предприятий, изд. 3, изд-во «Промшь», 1967.
- Г а в р и л о в И. В., Наладка систем управления ртутными преобразователями, изд-во «Энергия», 1968.
- 3еленов А. Б., Т е р т ы ч н и к о в В. Н., Г у л я к и в В. Г., Электропривод механизмов прокатных станов, Металлургиздат, 1966.
- Загальский Л. Н. и Зильберблат М. Э., Частотный анализ систем автоматизированного электропривода, изд-во «Энергия», 1968.
- П ы ш к а л о В. Д., А к и м о в Л. В., Ш а м р а й В. П., Оптимальные по быстродействию промышленные электроприводы, изд-во «Энергия», 1967.
- М а л и к о в С. Ф., Тюрин Н. И., Введение в метрологию, изд-во стандартов, 1965.
- Фремке А. В. (ред.), Электрические измерения, Госэнергоиздат, 1963.