Во время работы двигателей под нагрузкой проверяется коммутация на коллекторе и производятся контрольные измерения токов, напряжений и скорости вращения. Потери в машине могут быть рассчитаны по каталожным и справочным данным [Л. 15 и др.]. У машин мощностью более 100 кВт желательно оценить потери при опытах холостого хода и короткого замыкания. Методика измерения потерь описана в учебниках (например, [Л. 2, 3, 4]). Мощность Р0, потребляемая двигателем при холостом ходе, слагается из механических потерь рмех потерь от вихревых токов в стали ротора рж и потерь в меди якоря. Механические потери в свою очередь включают потери на трение ртр (в подшипниках и на коллекторе) и вентиляционные рвент. При холостом ходе ток якоря очень мал, поэтому потерями в меди якоря можно пренебречь. Потери в меди якоря удобнее всего определять при невозбужденном двигателе.
Таблица 2-6

Якорь питается от сети через пусковое сопротивление или от отдельного генератора по схеме опыта короткого замыкания (см. рис. 2-20). Для правильной оценки падения напряжения на щетках ΔUщ желательно медленно, на ползучей скорости проворачивать якорь. По напряжению на якорных цепях Uк.з (включая ошиновку и токовые аппараты) и току Iк.з определяется полное сопротивление Rя=Uк.з/Iк.з
В табл. 2-6 для иллюстрации приведены потери некоторых машин постоянного тока.
Полезная мощность на валу двигателя Р рассчитывается по мощности, потребляемой из сети, Рс и потерям Σρ. Потери в двигателе складываются из потерь холостого хода и потерь в меди рм, созданных током нагрузки
![]() (2-3)
(2-3)
МОмент на валу двигателя М рассчитывается по известной зависимости
![]() (2-4)
(2-4)
где М — момент, кГ-м, Р — мощность, кВт; п— скорость вращения, об/мин.
Ниже рассматривается методика снятия характеристик двигателей некоторых распространенных электроприводов.
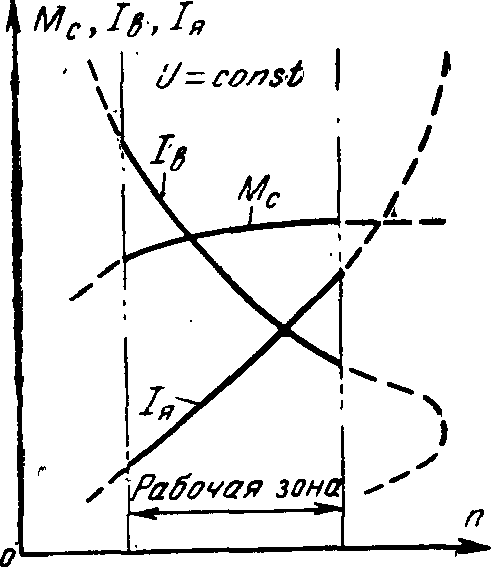
Рис. 2-26. Характеристики электропривода механизма передвижения.
- Электроприводы механизмов и машин, передвигаемых в горизонтальной плоскости, имеют момент нагрузки, зависящий в основном от трения. МОмент трения механизмов на колесах (тележек и мостов кранов, слитковозов, электрокар), а также механизмов скольжения (суппортов станков, толкателей) мало зависит от скорости, но может иметь большую величину при трогании с места.
Во время испытания подобных электроприводов желательно получить характеристику момента сопротивления (момента трения Мт, рис. 2-26) при разном состоянии смазки
![]()
При неизменном напряжении якоря (Uя= Uc = const) и регулировке в цепи возбуждения снимаются характеристики I'n = f(n) и IB = f(n); в системах с регулировкой напряжения якоря (при IB=const) снимаются характеристики I"я=f(п).
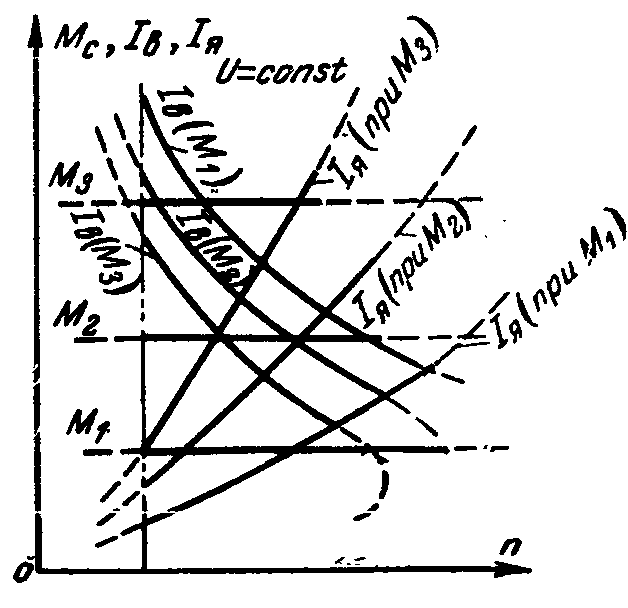
Рис. 2-27. Характеристики электроприводов с постоянными статическими моментами, определяемыми заданной технологической нагрузкой.
- Электроприводы подъемных механизмов, прокатных клетей, металлообрабатывающих станков и различных иных агрегатов имеют неизменные статические моменты, определяемые заданной технологической нагрузкой. Примерные рабочие характеристики такого привода даны на рис. 2-27. Разным скоростям соответствует обычно разный максимально допустимый ток якоря. Его величина зависит от многих факторов, например: чем выше скорость, тем лучше охлаждение двигателя (при отсутствии принудительной вентиляции) и, следовательно, можно допустить выделение большого количества тепла
 в меди якоря.
в меди якоря.
Однако при больших скоростях сильнее проявляется реакция якоря, ухудшается коммутация щеток, а иногда возникают перегревы отдельных частей вследствие механических и электрических потерь. Учесть все эти факторы наладчик может только при тщательном испытании двигателя; в первую очередь он должен ориентироваться на те предельные значения тока Iмакс =f(n), которые дает завод- изготовитель.
- Мjмент сопротивления вентилятора резко возрастает с увеличением скорости вращения (рис. 2-28,а).
У регулируемых вентиляторов с приводными двигателями постоянного тока во время наладки необходимо оценить максимально возможные рабочие скорости. При открытых задвижках лимитировать может номинальный ток якоря или допустимая скорость двигателя; необходимо также проверить, не возникают ли опасные вибрации привода на больших скоростях.

Рис. 2-28. Характеристики электроприводов со статическим моментом, зависящим от величины скорости. а — привод с вентиляторным моментом; б — привод с моментом прямо пропорциональным скорости.
По результатам испытаний выбираются сопротивление реостата возбуждения и уставка максимальной защиты. В данном случае максимальную защиту рекомендуется настраивать на величину 1,1—1,15 пускового тока якоря Iп, соответствующего скорости, принятой за максимально допустимую по всем основным показателям (при nмакс).
Электроприводы насосов и ряда компрессоров имеют момент нагрузки, изменяющийся прямо пропорционально скорости M = kn; наклон характеристики моментов зависит от положения клапанов или задвижек (рис. 2-28,б). Двигатели насосов несколько менее чувствительны к изменению скорости, чем двигатели вентиляторов, но для них также должен быть строго ограничен верхний предел скорости. Максимальную защиту таких приводов обычно настраивают на (1,2-1,3)Iп (при n-макс).
Электроприводы многих механизмов работают в кратковременном или повторно-кратковременном режиме. Весьма часто привод даже не разгоняется до установившейся скорости и снять характеристики двигателя с помощью обычных стрелочных приборов не представляется возможным. При испытании двигателей таких приводов под нагрузкой в первую очередь проверяются коммутация щеток и величины толчков тока в переходных режимах, т. е. выполняются такие же операции, как при пробных пусках.
Основными показателями работы таких приводов являются время разгона и торможения, а иногда также время реверса.
Для оценки переходных процессов рекомендуется использовать электронный осциллограф с послесвечением; при необходимости проведения контрольных расчетов следует применять светолучевые осциллографы. Осциллограммы переходных процессов имеют существенное значение не только для наладки данного привода в рассматриваемых условиях, но позволяют оценить возможность интенсификации работы агрегата в целом и найти рациональные решения при проектировании аналогичных установок.
Добиваясь получения благоприятных переходных режимов, наладчик всегда должен иметь в виду тепловое состояние отдельных частей двигателя. У некоторых приводов необходимо проверить, допускает ли обмотка возбуждения длительное включение на полное рабочее напряжение.
Выбирая двигатели по среднеквадратичным величинам тока или мощности, иногда не учитывают ухудшение охлаждения в периоды пауз и работы с низкими скоростями. У приводов кратковременных включений допускаются значительные перегрузки двигателей. При этом исходят из того, что нагрев происходит медленно и температура обмоток не превысит нормируемых значений.
Во время наладки необходимо проверить, не превышает ли длительность включения принятых в расчетах величин (см. § 1-2); в случае затяжных включений при относительно низкой температуре корпуса возможен недопустимый перегрев якорных цепей двигателя.
Приведенные замечания показывают, как разнообразны могут оказаться причины перегрузки двигателей; от наладчика всегда требуется внимательное, вдумчивое отношение к режиму работы привода и умение определить, не превышает ли температура деталей машины допустимые величины.