Методика проведения пробных пусков двигателей, описанная в § 1-10, должна быть дополнена рядом замечаний по контролю качества изоляции, по проверке на отсутствие витковых замыканий якоря и оценке качества коммутации щеток.
Согласно справочникам и действующим инструкциям сопротивление изоляции машин постоянного тока должно проверяться при повышенных температурах и отвечать требованиям, представленным в табл. 1-5. В правилах технической эксплуатации имеется общее указание о том, что машины напряжением до 800 в должны иметь сопротивление изоляции не менее 1 МОм, а для возбудителей и ЭМУ допускается 0,5 МОм.
Новые машины, подлежащие пуску, как правило, имеют хорошую изоляцию, но в практике пуско-наладочных работ их не нагревают для проверки изоляции. Нередко вследствие влажности помещения машины имеют сопротивления изоляции ниже норм (см. § 1-10), но все же небольшие и средние машины включают на рабочее напряжение. Таким образом, в период пуска систематически нарушаются нормы. Ответственность берут на себя прорабы и мастера, полагаясь на свой опыт. В период испытаний на ходу машины подсыхают, и ко времени сдачи в эксплуатацию их изоляция уже соответствует нормам.
Таблица 2-3
Машины напряжением до 460 в

Учитывая обширный опыт пуско-наладочных работ, автор считает возможным вынести на обсуждение новые условия допустимого включения машины. Рекомендуемые показатели сведены в табл. 2-3—2-5, в которых приняты обозначения: Р — номинальная мощность при ПВ = 100%; х — минимальная температура обмоток и коллектора, при которой должна быть измерена изоляция; R — показания мегомметра; Ка — коэффициент абсорбции.
При пробном пуске коммутация проверяется путем наблюдения за коллекторами во время толчков пускового тока, а затем при работе без нагрузки при максимальных напряжении и скорости. Степень искрения сопоставляется с классификационной шкалой ГОСТ 183-66.
Наладка качественной коммутации щеток в ряде случаев требует проведения специальных сложных работ по регулировке элементов электрической машины и настройке переходных режимов системы управления. Этому вопросу посвящены многие книги [Л. 5, 6, 17, 24] и статьи в электротехнических журналах; в данной книге рассматриваются только основные положения, которые необходимо знать молодым инженерам, квалифицированным рабочим-эксплуатационникам и техникам-наладчикам.
Таблица 2-4
Машины напряжением 460—900 в при возможности плавного подъема напряжения на якоре (генераторы или двигатели в системах Г—Д)

Разгон и работа машины под нагрузкой должны проходить практически без искрения; однако достигнуть этого в ряде случаев удается не сразу. С небольшим искрением (по ГОСТ класс IV2), не вызывающим заметного повреждения коллектора и щеток, часто приходится мириться.
Таблица 2-5
Машины напряжением 460—900 в, питаемые от ионных или тиристорных выпрямителей
У машин, работающих в продолжительном режиме с редкими пусками и перегрузками, во время толчков тока допускается даже значительное искрение (по ГОСТ класс 2), при котором искры на большом количестве щеток имеют белое свечение и длину до 5—10 мм.
Оценить, насколько искрение является опасным и может ли быть продолжено испытание под током, можно только при наличии достаточного практического опыта, приобретаемого путем наблюдения за машинами в различных режимах работы. Во всех случаях, когда на отдельных щетках или на большей их части наблюдается появление искр длиной более 10—15 мм, следует немедленно приостановить испытание и косвенными методами выяснить причину плохой коммутации.
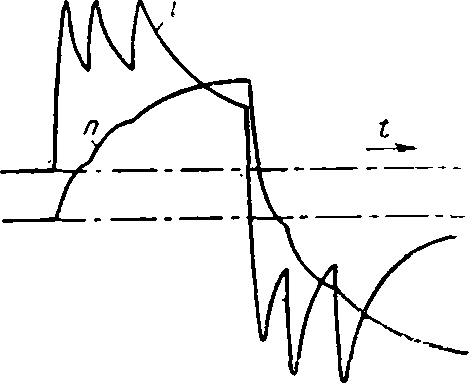
Рис. 2-10. Осциллограмма процессов пуска и реверса двигателя при контакторном управлении в функции времени.
Окончательная проверка коммутации производится при комплексном испытании машины под нагрузкой в различных режимах работы. Недопустимое искрение может быть связано не только с дефектами машины, но и со схемой управления. От схемы управления зависят быстрота изменения тока в цепи якоря и в цепи возбуждения, максимальные значения толчков тока, индуктивность контура главного тока, соотношение тока якоря и магнитного потока машины в разные моменты времени.
Наибольшая скорость изменения тока di/dt и наибольшие пики тока обычно имеют место при контакторном управлении (рис. 1-6,а), когда в цепи якоря по ступеням выводятся пусковые сопротивления.
Примерная осциллограмма разгона и реверса двигателя, управляемого по такой схеме, приведена на рис. 2-10. Толчки пускового тока нередко превышают номинальный ток в 2,5 раза; нарастание пускового тока длится всего сотые доли секунды, и изменение магнитного потока дополнительных полюсов происходит медленнее изменения тока якоря. Такое явление может привести к искрению на коллекторе. Еще более резко изменяется ток якоря при реверсе. В тех случаях, когда толчки тока вызывают недопустимое искрение, желательно увеличить число ступеней пуска и торможения или, если это слишком сложно, увеличить выдержку времени реле ускорения и снизить тем самым интенсивность переходных процессов.
Нередко опасное искрение возникает только при относительно высоких скоростях; тогда диаграмму пуска целесообразно перестроить, как показано на осциллограмме рис. 2-11.
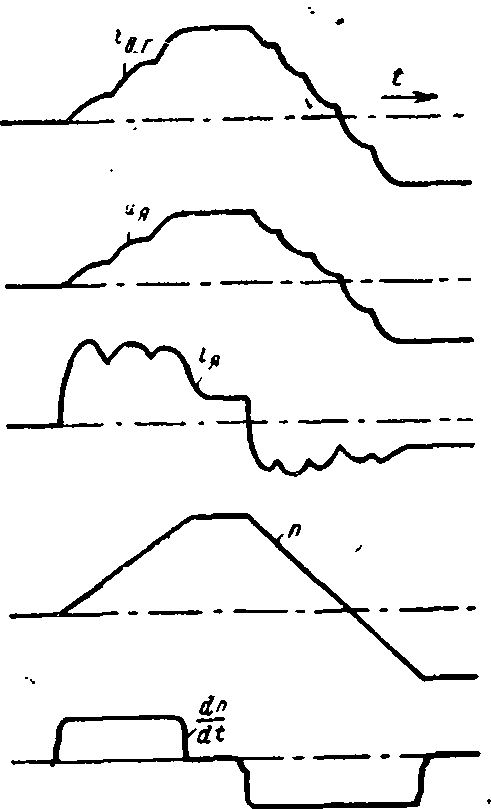
Рис. 2-12. Осциллограмма процессов разгона и торможения двигателя, управляемого по системе Г—Д c контакторным управлением в цепи возбуждения.
Для управления электродвигателями средней и большой мощности часто применяется система генератор — двигатель (рис. 1-7), при которой изменение скорости вращения двигателя до основной производится путем регулирования тока возбуждения генератора Iв.г, а выше основной—уменьшением тока возбуждения двигателя.

Рис. 2-11. Осциллограмма пуска двигателя с уменьшением толчков тока при повышении скорости.
При ступенчатом выведении сопротивлений в контуре возбуждения генератора ток якорей машин Iя изменяется значительно плавнее (рис. 2-12), чем при контакторном управлении в главной цепи; однако и в данной схеме безыскровая коммутация щеток во многом определяется настройкой режимов управления.
Показательной является настройка коммутации двигателей некоторых главных приводов реверсивных прокатных станов. В ряде случаев путем подбора щеток, регулировки добавочных полюсов и других обычных методов не удавалось получить удовлетворительную коммутацию, хотя двигатели были использованы по мощности не полностью.
Безыскровая коммутация была достигнута только после тщательной кропотливой настройки режимов управления, при которой наряду с повышением производительности стана были сглажены неблагоприятные толчки главного тока.
Следует отметить, что пульсации якорного тока, происходящие с большой частотой, во многих случаях не вызывают искрения щеток и в целом безвредны для машины. Такой режим работы характерен для двигателей, питаемых от управляемых выпрямителей. Ток якоря двигателя в системах УВ—Д за тысячные доли секунды может измениться на величину (1-1,5)I, но магнитный поток дополнительных полюсов, а главное, реакция якоря изменяются только соответственно усредненному значению тока.

Рис. 2-13. Осциллограммы оптимального переходного процесса разгона реверсивного электропривода. Система Г—Д с ионным возбуждением.
В современных системах Г—Д ток возбуждения генераторов автоматически регулируется по заданному закону из условий так называемого оптимального режима управления электроприводом. Типичными примерами могут служить режимы работы главных приводов реверсивных прокатных станов (блюмингов, слябингов) и сходных по режиму реверсивных механизмов (нажимных устройств, манипуляторов, рабочих рольгангов и др.). По технологии производства указанные электроприводы действуют последовательно, и от их быстродействия зависит производительность крупнейших прокатных станов.
Допустимые параметры переходных процессов в практике проектирования и режимной наладки быстродействующих электроприводов определяют по ограничениям, накладываемым электрическими машинами и механизмами; применительно к ним находят оптимальные по быстродействию законы и структуры систем управления.
Кроме того, при повторно-кратковременных режимах интенсивность переходных процессов регулируется с учетом максимально допустимого нагрева машины.
Оптимальное изменение параметров двигателей может быть получено в системах Г—Д с помощью управляемых ртутных выпрямителей и тиристоров, а при малых машинах — путем использования магнитных усилителей, тиратронов и транзисторов.
На рис. 2-13 представлены примерные осциллограммы оптимальных переходных процессов разгона реверсивного двигателя блюминга при холостом ходе. Изменение скорости п происходит по линейному закону с постоянным ускорением dn/dt≈const; для этой цели поддерживается постоянная динамическая составляющая тока Iр, которая в данном случае вследствие отсутствия момента сопротивления равна полному току. Представленный переходный процесс осуществлен на ряде приводов прокатных станов. Он достигается путем безынерционного изменения напряжения Uв.г на обмотке возбуждения генератора. Время нарастания и спадания тока якоря iя (участки 1-3 и 4-6) зависит от уровня напряжения Uвг и лимитируется величиной di/dt, допустимой для испытуемых машин.