Пуск асинхронного двигателя выполняется с соблюдением всех мероприятий, описанных в гл. 1.
Асинхронные двигатели с короткозамкнутым ротором напряжением 220/380 и 500 в при включении под напряжение контролируются только по величине тока холостого хода и скорости вращения. Измерения следует производить после обкатки подшипников. Полученный при измерениях и приведенный к номинальному напряжению ток холостого хода не должен отличаться от каталожного более чем на ±10%.
Во время пересчетов следует пользоваться заводскими характеристиками; в случае их отсутствия можно ориентироваться на справочные данные [Л. 15].
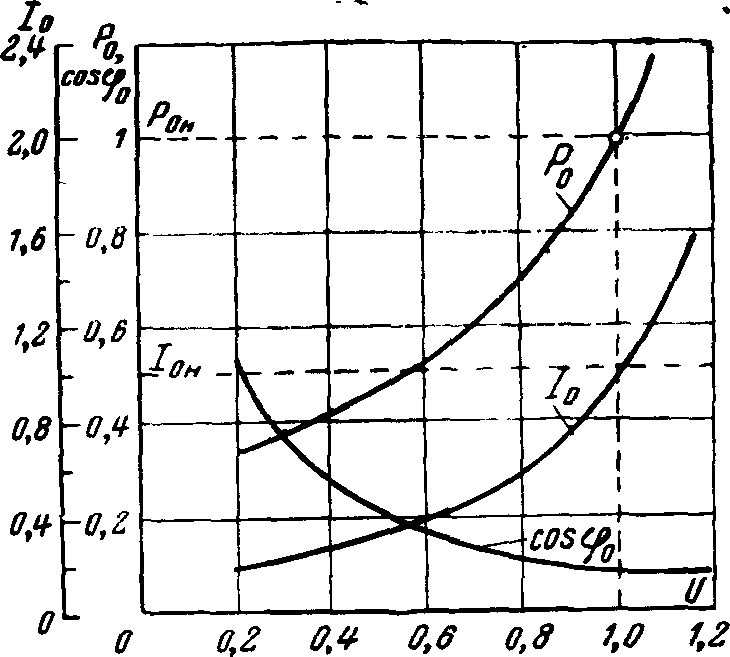
Рис. 3-8. Характеристики холостого хода асинхронного двигателя.
При наладке асинхронных двигателей, питаемых от синхронных генераторов или статических преобразователей частоты, желательно снять зависимость тока холостого хода и соответствующей мощности от напряжения источника питания. В группе однородных двигателей (например, двигателей роликов рольганга) подобные характеристики (при разных рабочих частотах) достаточно снять только у двух-трех машин. Примерные зависимости I0, Р0, cos φ0=f(Uс) даны на рис. 3-8.
По данным опытов холостого хода и короткого замыкания легко построить круговую диаграмму асинхронного двигателя, дающую наглядное представление о соотношении основных его параметров (рис. 3-9). В последующем диаграмма может быть использована для оценки режимов работы электропривода.
Зависимость электромагнитного момента и тока статора асинхронного двигателя единой серии с коротко-замкнутым ротором (типа А) от скорости вращения представлена на рис. 3-10 (кривые Мк.з, Iк.з). У таких двигателей пусковой ток Iп превышает номинальный ток в 4,5—7 раз; пусковой момент Мп= 1,1 :l,5Мн максимальный Ммакс = 2:3Мн.
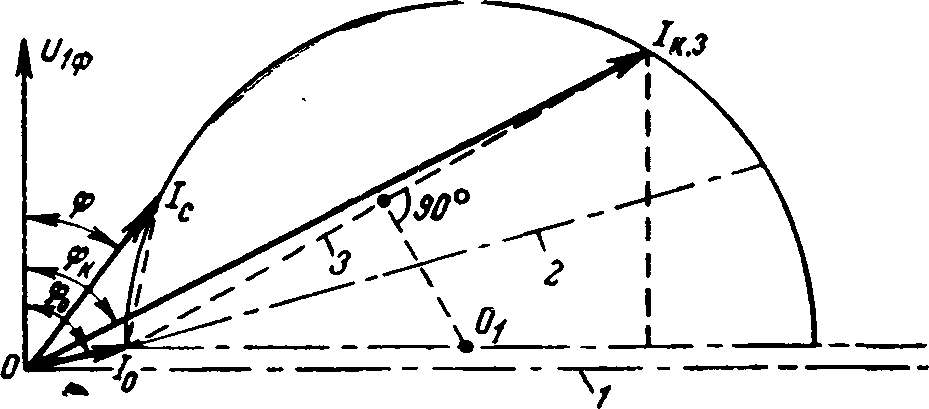
Рис. 3-9. Круговая диаграмма асинхронного двигателя.
1 — линия подведенной мощности; 2 — линия электромагнитной мощности (моментов); 3 — линия полезной мощности.
Вследствие того что вращающий момент двигателя по мере нарастания скорости примерно до 80% синхронной непрерывно увеличивается, разгон происходит с возрастающим ускорением; в то же время ток статора начинает резко спадать только к концу разгона. Указанное явление иллюстрируется примерной осциллограммой (рис. 3-11,а) пуска асинхронного двигателя серии А без нагрузки.
Следует иметь в виду, что из-за большой кратности пускового тока в случае затяжного пуска создается опасность быстрого перегревания обмоток двигателя.
Двигатели краново-металлургические (МТ, МТК, МТВ и др.), предназначенные для частых повторных включений, характеризуются повышенной перегрузочной способностью, большими пусковыми моментами и относительно малыми пусковыми токами (рис. 3-10, кривые Мм, Iм) [Л. 15]. Благодаря большим пусковым моментам они разгоняются быстрее (рис. 3-11,б), чем двигатели таких же мощностей единой серии А. Недостатки краново-металлургических двигателей проявляются в повышенном скольжении, более низком к. п. д. и ухудшенном cos φ.
В наиболее тяжелых условиях находятся специальные рольганговые двигатели (серии АР); им приходится работать с большой частотой включений и осуществлять разгон (рис. 3-11,в) ролика и изделия, маховые моменты которых в несколько раз превышают маховые моменты самого двигателя [Л. 15]. Повышенные пусковые моменты достигаются специальной конструкцией и, в частности, изготовлением обмотки ротора из материалов повышенного сопротивления.
При наладке предварительные испытания двигателей повторно-кратковременного режима ограничиваются пробным пуском совместно с механизмом.

Рис. 3-10. Зависимость электромагнитного момента и тока асинхронного двигателя от скорости вращения ротора.
Мк. з, Iк. з , — двигателя с к. з. ротором единой серии (типа А); Мм, Iм — двигатели краyовометаллургические (серии МТК, МТ); Мф, Iф— двигатели с фазным ротором при закороченном роторе.
Если механизм легко трогается с места, то дальнейшие испытания уже относятся к области исследования режимов работы, а не собственно двигателя. В случаях, когда двигатель не может привести механизм в движение, рекомендуется выполнить следующее: а) измерить напряжение на всех трех фазах статора (следует учесть, что пусковой момент примерно пропорционален квадрату напряжения); б) измерить ток во всех трех фазах статора (токи должны быть равны и примерно соответствовать каталожному значению); в) укрепить рычаг на муфте двигателя и с помощью пружинного силомера или гири определить момент трогания механизма.
Этот момент Мтм должен быть меньше каталожного пускового момента двигателя![]()
Асинхронные двигатели с фазным ротором при пуске по обычной схеме (рис. 3-12,а) находятся в таком же режиме, как двигатели постоянного тока, включаемые через пусковые сопротивления в цепи якоря. Характеристики электромагнитных моментов, соответствующие различным пусковым сопротивлениям, представлены на рис. 3-12,б. На рис. 3-12,в показаны осциллограммы изменения скорости п, тока статора Iс и тока ротора Iр при трехступенчатом пуске асинхронного двигателя в функции времени.

Рис. 3-11. Осциллограммы пуска асинхронных двигателей без нагрузки.
а — двигатель общепромышленного применения (типа А); б — двигатель краново-металлургический (серии МТК): в — двигатель рольганговый (серии АР); ic — ток статора; (е , — ток статора выпрямленный и отфильтрованный (см. схему на рис. 5-15); п — скорость ротора.
Работа двигателя под нагрузкой.
При наладке приводов, работающих в продолжительном режиме (вентиляторы, насосы, транспортеры и др.), следует измерить токи статора, ротора и скорость вращения двигателя во время работы под нагрузкой. У машин мощностью свыше 40 кВт желательно измерить также величину скольжения, потребляемую мощность и рассчитать коэффициент мощности (cos φ).
Токи, напряжения, мощности и cos φ измеряются и рассчитываются обычными методами с применением электромагнитных или электродинамических приборов классов 1—1,5 при прямом включении приборов или через трансформаторы тока и напряжения. Потребляемая мощность может быть измерена с достаточной точностью при помощи однофазного ваттметра, так как нагрузка во всех трех фазах двигателя одинакова.
По данным электрических измерений может быть рассчитан статический момент нагрузки Мс на валу двигателя. Для этой дели предварительно определяется мощность Рд, передаваемая механизму,
![]() (3-13)
(3-13)
где Рс — потребляемая из сети мощность;
Σρ — сумма всех потерь;
рм = 3I2r'ф — потери в меди двигателя при нагрузке.
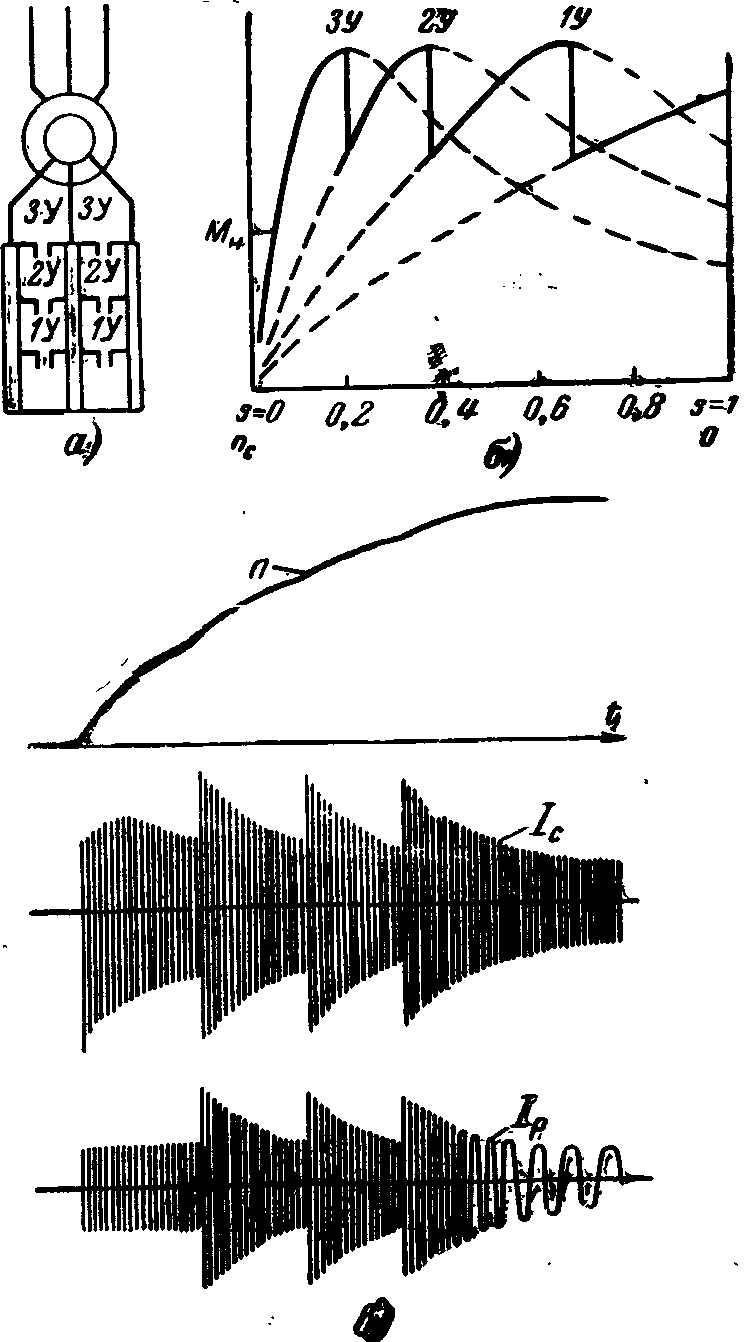
Рис. 3-12. Ступенчатый разгон асинхронного двигателя с фазным ротором. a — схема управления; б — пусковая диаграмма; в — осциллограмма изменения скорости и токов во времени.

Рис. 3-13. Рабочие характеристики асинхронных двигателей.
При наладке крупных асинхронных двигателей с регулируемой нагрузкой желательно проверить их рабочие характеристики, дающие зависимость п (или s), М, I1, cosq> и η (к. g. д.) от мощности на валу Рд (рис. 3-13).
Для асинхронных двигателей с невыключаемыми сопротивлениями в цепи ротора следует также снять механическую характеристику
п=f(Мс).
Все характеристики снимаются при неизменном напряжении Uc и частоте fc сети.
В пределах нормального эксплуатационного изменения нагрузки производятся измерения напряжения Uc, тока статора I1, активной мощности Рс, скорости п (или скольжения s) и по этим данным рассчитываются все остальные величины.
Мощность на валу Рд и момент Мд рассчитываются, как указано выше, по активной мощности Рс, потребляемой из сети, величине потерь в двигателе и скорости ротора п:
![]() (3-16)
(3-16)
Если во время испытаний в цепи ротора остается невыключаемое сопротивление, то к величине потерь необходимо прибавить выделяемую в сопротивлении мощность Рдоп = 3Uр.фIф.
Скольжение двигателей удобно определять стробоскопическим методом или с помощью индуктивной катушки.
У двигателей с фазным ротором скольжение может быть определено также с помощью магнитоэлектрического амперметра, включаемого в одну из фаз ротора, а при наличии невыключаемого сопротивления — с помощью вольтметра, присоединяемого к кольцам ротора. Рекомендуется применять приборы с двусторонней шкалой. Скольжение рассчитывается по числу полных колебаний стрелки прибора (подробнее см. гл. 5).