Глава четвертая
СИЛОВЫЕ УСТАНОВКИ ОБЩЕСТВЕННЫХ ЗДАНИЙ
Общие положения
В общественных зданиях наряду с осветительными электроприемниками устанавливается технологическое и санитарно-техническое оборудование, которое обычно называют в отличие от осветительного силовым электрооборудованием. Удельный вес нагрузки силовых электроприемников в общей нагрузке зависит от назначения зданий и колеблется в пределах 40—85 %. Эти здания и сооружения имеют самые различные назначения, и в них осуществляются технологические процессы, при которых используется большое количество силовых электроприемников, имеющих к тому же различные режимы работы.
Разнообразие оборудования и режимов его работы затрудняет общее решение вопросов оптимизации с точки зрения экономии электроэнергии. Однако некоторые вопросы являются общими, причем важнейшими из них являются вопросы режимов работы электродвигателей, а также формирования и регулирования графиков нагрузки городских электросетей.
Условно все силовые электроприемники в зависимости от выполняемых ими технологических операций могут быть разделены на следующие основные группы:
- электроприемники механического оборудования;
- электротепловое оборудование;
- привод холодильных машин;
- подъемно-транспортное оборудование;
- санитарно-технические установки;
- устройства связи и сигнализации;
- противопожарные устройства;
- аппаратура управления.
Основным приводным механизмом инженерного оборудования общественных зданий является асинхронный электродвигатель с короткозамкнутым ротором, реже (крупные мощные механизмы) — с фазным ротором, в некоторых типах лифтов применяются электродвигатели постоянного тока. Остановимся лишь на наиболее распространенном трехфазном асинхронном электродвигателе с короткозамкнутым ротором, влиянии на его характеристики нагрузки, изменений напряжения и частоты в сети.
4.2. Асинхронные электродвигатели и режимы их работы
Нагрузка электродвигателя.
Расход электроэнергии двигателем зависит от его мощности, продолжительности работы, частоты включений, параметров питающей электрической сети. На рис. 4.1 показана зависимость КПД и cos φ асинхронного трехфазного двигателя с короткозамкнутым ротором от нагрузки. Из рисунка видно, что КПД и cos φ являются функцией нагрузки на валу и достигают максимума при загрузке двигателя не менее 75 % номинальной мощности. Коэффициент полезного действия, %, выражается следующей формулой:
![]() (4.1),
(4.1),
где Р2 — полезно отдаваемая мощность, кВт; ∆Рм, ∆Рст, ∆Рмех — соответственно потери мощности в меди, стали и механические, кВт.
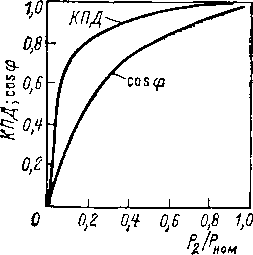
Рис. 4.1. Зависимость КПД и cos φ трехфазного асинхронного электродвигателя от нагрузки (в долях номинальной нагрузки)
Потери в обмотках (меди) зависят от квадрата тока и определяются нагрузкой на валу, дополнительными потерями, вызванными высшими гармоническими в кривой тока и эффектом вытеснения тока. Дополнительные потери тоже можно считать практически пропорциональными квадрату тока. Потери мощности в стали состоят из потерь на гистерезис и вихревые токи. Первые из них пропорциональны частоте тока, вторые — квадрату частоты. Поскольку частота в роторе при работе двигателя составляет всего 2—3 Гц (частота скольжения), можно пренебречь потерями в стали ротора и считаться только с потерями в стали статора. Таким образом, при небольших изменениях напряжения и частоты в питающей сети можно считать потери в стали постоянными и не зависящими от нагрузки. Это и является основной причиной того, что КПД двигателя снижается при малых нагрузках. Понижение cos φ при малых нагрузках также объясняется увеличением удельного веса тока холостого хода (реактивной составляющей). Что касается механических потерь на трение в подшипниках и вентиляцию, то их удельный вес весьма мал и их снижение достигается при своевременной смазке трущихся частей и правильной эксплуатации двигателя. Из изложенного видно, что недогруженный двигатель расходует относительно больше энергии на 1 кВт-ч полезной работы.
Переменные потери, кВт,
![]() (4.5)
(4.5)
Общее количество потерянной электроэнергии зависит от времени t работы электродвигателя, кВт-ч,
![]() (4.6)
(4.6)
Для двигателей переменного тока важным энергетическим показателем является коэффициент мощности (cos φ). Асинхронные двигатели потребляют из питающей среды реактивную мощность, которая загружает сеть и создает в ней дополнительные потери энергии. Реактивная мощность определяется по формуле, квар:
![]() (4.7)
(4.7)
Для большинства современных электродвигателей cos φ≈0,84:0,9, следовательно, на каждый киловатт активной мощности асинхронный двигатель потребляет из сети 0,45—0,75 квар. реактивной мощности.
Изменения напряжения сети.
Отклонения напряжения в силовых сетях зданий при нормальном режиме работы обычно не превышают ±5 %, но могут для удаленных двигателей достигать 10 % и более.
Рассмотрим, как изменяются характеристики двигателя при понижении и повышении напряжения. При этом будем иметь в виду привод с постоянным моментом нагрузки Мнагр.
Пренебрегая падением напряжения в обмотке статора, можем написать, что противо-ЭДС статора Е равна приложенному напряжению:
![]()
При понижении напряжения U магнитный лоток Ф уменьшается, следовательно (без учета насыщения), уменьшается реактивная составляющая тока:
Iρ=U. (4.8)
При повышении напряжения все происходит обратно сказанному выше, но при этом следует учитывать, что в двигателях с большим насыщением стали реактивная составляющая тока может сильно увеличиться непропорционально напряжению, что приведет к резкому снижению cosep и соответственно к увеличению потерь в сети.
На рис. 4.2 приведены кривые изменений тока, cos φ
и частоты вращения при изменении напряжения в сети для различных долей нагрузки (100, 80, 65, 40, 25 %).
Изложенные выше соображения и приведенные формулы базируются на предположении постоянства момента нагрузки Мнагр=const независимо от числа оборотов. Это относится к поршневым насосам, станкам и т. п. Но в общественных зданиях имеются приводы с так называемым вентиляторным моментом (центробежные насосы, вентиляторы), при котором момент нагрузки пропорционален квадрату, а мощность — кубу частоты вращения. В этом случае уже нельзя считать тормозной момент постоянным, поскольку с изменением напряжения изменяется и число оборотов.
Изменения частоты.
Рассмотрим влияние изменений частоты на основные характеристики трехфазного асинхронного электродвигателя при постоянном моменте нагрузки Мнагр=const.
Изменение частоты в сети при неизменном напряжении обусловливает соответствующее изменение магнитного потока, так как известно, что
![]() (4.14) где Ε1 — ЭДС статора.
(4.14) где Ε1 — ЭДС статора.
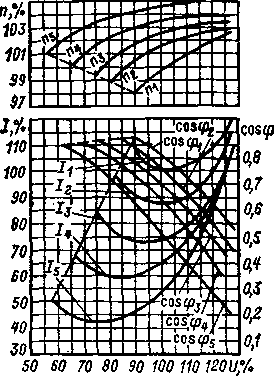
Рис. 4.2. Кривые тока, cos φ и частоты вращения асинхронного двигателя при изменениях напряжения от 50 до 120 % для различных долей нагрузки: Р1=РНОМ, Р2=0,8РНОМ, Р3=0,65РНОМ, Р4=0,4РНОМ, Р5=0,25РНОМ
При уменьшении частоты f поток Ф возрастает и, следовательно, пропорционально увеличивается реактивная составляющая тока, а при высоком уровне насыщения стали в машине реактивная составляющая может увеличиться еще больше, в результате cos φ ухудшится и возрастут потери в сети. Результирующий ток теоретически может измениться в ту или другую сторону, но, как правило, ток увеличивается, т. е. возрастают потери в обмотках.
При увеличении потока несколько возрастают и потери в стали, так как они пропорциональны индукции в квадрате, а частоте — в степени 1,5—1,6. Надо учитывать и некоторое уменьшение мощности, поскольку с уменьшением частоты вращения несколько ухудшаются условия вентиляции двигателя. В принципе же мощность снижается пропорционально относительному уменьшению частоты:
![]() (4.15)
(4.15)
Из сказанного следует, что КПД машины ухудшится. Определенное значение имеют и не синусоидальность напряжения (повышается ток холостого хода и ухудшается cos φ), и асимметрия напряжений, и некоторые другие факторы, зависящие от работы энергосистемы, однако наиболее важным для снижения потерь энергии следует считать отключение двигателей, работающих вхолостую или с очень малой загрузкой, повышение загрузки или замену двигателей на двигатели меньшей мощности при загрузке 50 % и менее (при загрузке 50— 75 % целесообразность замены определяется на основании технико-экономического расчета), повышение КПД рабочей машины, правильный выбор электродвигателя.