Глава третья
ТЕХНОЛОГИЯ МОНТАЖА ЭЛЕКТРООБОРУДОВАНИЯ И ЗАЗЕМЛЯЮЩИХ УСТРОЙСТВ
3-1. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И ПУСКОРЕГУЛИРУЮЩАЯ АППАРАТУРА
На промышленных предприятиях наиболее широко применяют асинхронные электродвигатели; на ряде производств, при необходимости регулирования скорости — машины постоянного тока.
Асинхронные электродвигатели выпускаются с короткозамкнутым либо с фазным ротором, имеющим контактные кольца и щетки. По конструктивному исполнению, определяемому условиями окружающей среды, в которой электродвигатели должны работать, они делятся на защищенные, закрытые и взрывозащищенные.
Наибольшее распространение получила единая серия асинхронных двигателей А2 и АО2 мощностью до 100 кВт (табл. 3-1).
После букв в обозначении асинхронных двигателей единой серии первая цифра 2 означает, что это электродвигатели единой серии, введенной с 1961 г., в отличие от ранее выпускавшихся, которые после первых букв А и АО не имели цифры 2, характеризующей серию. Первая цифра после цифры 2 означает наружный диаметр статора (габарит), следующая цифра — порядковая длина статора и цифра после тире — число полюсов. Например, марка АО281-10 означает: асинхронный двигатель, закрытый, обдуваемый, единой серии 1961 г., восьмого габарита, первой длины, десятиполюсный.
Таблица 3-1
 Частота вращения двигателя зависит от частоты тока и числа пар полюсов
Частота вращения двигателя зависит от частоты тока и числа пар полюсов ![]()
где f — частота тока, гц; р — число пар полюсов.
При частоте тока f = 50 гц и при десятиполюсном двигателе (р=5) частота вращения асинхронного двигателя составит:
![]()

Рис. 3-1. Схема пуска трехфазного асинхронного двигателя с фазным ротором.
Практически асинхронные двигатели обладают нормальным скольжением ротора относительно вращающегося магнитного поля статора 3—5% и частота вращения двигателя для нашего примера составит 580—570 об/мин.
Электродвигатели с фазным ротором применяют в тех случаях, когда надо обеспечить плавный пуск, ограничить величину пускового тока, получить большой начальный пусковой момент вращения и при необходимости регулирования частоты вращения. Схема пуска трехфазного асинхронного двигателя с фазным ротором показана на рис. 3-1.
Перед пуском сопротивление 7 полностью вводят в цепь ротора (переключатель 6 устанавливают на контакты 1). После этого рубильником включают в сеть обмотку статора. Затем переключатель 6 постепенно переводят на контакты 2, 3, 4 и 5, при этом электродвигатель постепенно разворачивается. При положении переключателя на контактах 5 пусковое сопротивление полностью выведено из цепи ротора и электродвигатель развивает номинальное число оборотов.
Если электродвигатель редко пускают в ход, контактные кольца в конце пуска замыкают накоротко специальным устройством, которое одновременно поднимает щетки с контактных колец. При частых пусках щетки обычно не поднимают.
В случае применения электродвигателей с установочными автоматами, защищающими двигатели от перегрузок, устанавливают плавкие предохранители с плавкими вставками, выбранными по пусковому току*.
Защиту асинхронных короткозамкнутых двигателей от перегрузок в момент пуска осуществляют магнитными пускателями с тепловыми элементами или автоматами с тепловыми и электромагнитными расцепителями, которые обеспечивают наилучшие условия для эксплуатации.
*Плавкие предохранители для защиты от коротких замыканий устанавливаются непосредственно перед магнитными пускателями или в силовых пунктах.
Магнитные пускатели.
Для включения нереверсивного магнитного пускателя (рис. 3-2) нажимают кнопку П. При этом катушка магнитной системы пускателя Л обтекается током и происходит включение главных контактов Л. Одновременно с главными контактами в цепи управления включается блок-контакт Л, что позволяет отпустить кнопку П, оставляя пускатель во включенном положении. Два тепловых элемента реле РТ имеют в цепи управления нормально замкнутые контакты.
При опасной перегрузке электродвигателя размыкается один или оба контакта теплового реле РТ, цепь тока в катушке прерывается и происходит отключение главных контактов. Отключение также может быть выполнено от руки нажатием кнопки С, разрывающей цепь питания катушки.

Рис. 3-2. Схема управления электродвигателем посредством нереверсивного магнитного пускателя.

Реверсивные магнитные пускатели (рис. 3-3) служат для перемены направления вращения электродвигателя и представляют собой два спаренных нереверсивных магнитных пускателя, механически сблокированных между собой так, чтобы мог включаться только один из них. При нажатии кнопки Вперед замыкается цепь катушки В и размыкается цепь катушки пускателя Н. Кнопка Назад включает цепь катушки пускателя Н. Одновременность включения пускателей В и Н исключается, так как они механически сблокированы.
Магнитный пускатель осуществляет защиту электродвигателя от перегрузки, исчезновения напряжения в сети и понижения напряжения более чем на 30—40% номинального. При дальнейшем понижении напряжения в сети катушка не может удержать якорь электромагнита во включенном положении, и он отпадает.
Для защиты электродвигателя и ответвления к нему от коротких замыканий в магистральной сети перед магнитным пускателем устанавливают автоматы с максимальной защитой пли предохранители с плавкими вставками.
В некоторых технологических процессах, где привод машин осуществляется от асинхронных электродвигателей, требуется сокращать время выбега двигателя после его отключения до полной остановки. Для этой цели может быть применено электрическое торможение методом противовключения (рис. 3-4) или динамического торможения.
В схеме на рис. 3-4 применяют реверсивный магнитный пускатель 1К—2К и реле скорости PC.

После включения электродвигателя кнопкой Пуск включается пускатель 1К прямого направления и размыкается размыкающий блок-контакт в цепи катушки пускателя 2К обратного направления; одновременно включается реле скорости PC, замыкая замыкающий блок-контакт PC. Нажимом кнопки Стоп двигатель отключается от сети; одновременно замыкается блок-контакт 1К в цепи катушки 2К и пускатель 2К включает двигатель в обратном направлении. В это время кнопкой Пуск электродвигатель включить нельзя, так как в цепи катушки 1К разомкнут блок-контакт 2К.
При остановке двигателя (или при установленной определенной малой частоте вращения) реле PC разомкнет блок-контакт PC в цепи катушки 2К и двигатель отключится от сети; схема приводится в состояние готовности для повторного пуска.

Рис. 3-5. Схема динамического торможения трехфазного асинхронного двигателя включением постоянного тока от вспомогательного источника.
На рис. 3-5 показана схема динамического торможения. В качестве вспомогательного источника применен селеновый выпрямитель ВС. При нажатии на кнопку Пуск электродвигатель включается по схеме магнитным пускателем К. Одновременно замыкается блок-контакт К в цепи постоянного тока и включается электромагнитное реле времени РВ. Замыкается блок-контакт РВ в параллельной цепи катушки тормозного двухполюсного контактора постоянного тока КТ, но включения катушки КТ не происходит, так как в ее цепи при включении пускателя К разомкнулся размыкающий блок-контакт К.
Когда при нажатии на кнопку Стоп пускатель К отключит двигатель и вслед за этим замкнется блок-контакт К в цепи катушки контактора КТ, последний включит на две фазы обмотки статора постоянный ток, что вызовет быстрое торможение двигателя. Одновременно с отключением пускателя К разомкнется блок-контакт К в цепи катушки реле времени РВ; это реле сработает и разомкнет цепь катушки КТ с некоторой заранее установленной выдержкой времени, достаточной для полной остановки электродвигателя. После срабатывания реле времени РВ контактор КТ отключит от статора постоянный ток и схема будет приведена в первоначальное положение готовности для пуска.
Электродвигатели постоянного тока находят применение на промышленных предприятиях для обеспечения специальных механических характеристик и широких пределов регулирования скорости приводимых в движение механизмов.
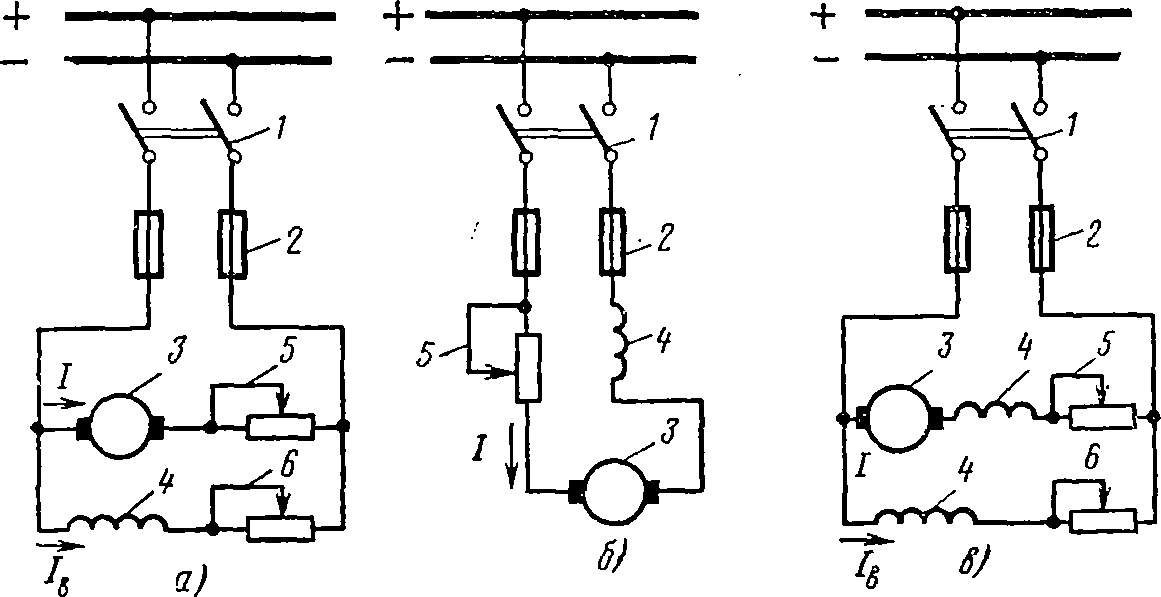
Рис. 3-6. Схемы включения двигателей постоянного тока.
1 — рубильник; 2 — предохранитель; 3 — якорь; 4 — обмотка возбуждения; 5 — пусковой реостат; 6 — реостат возбуждения.
В электродвигателе с параллельным возбуждением (рис. 3-6, а) при помощи реостата возбудителя 6 можно в широких пределах регулировать число оборотов; при изменениях нагрузки скорость вращения изменяется незначительно.
Для электродвигателей с последовательным возбуждением (рис. 3-6,б) характерен большой начальный момент вращения. Поэтому такой тип электродвигателей применяют, например, в электрической тяге. Вместе с тем, при изменениях нагрузки электродвигателя с последовательным возбуждением сильно изменяется его частота вращения. При увеличении нагрузки частота вращения электродвигателя уменьшается, а при снижении нагрузки ниже номинальной на 20—25% частота вращения увеличивается настолько, что работать становится практически невозможно; на холостом ходу электродвигатель с последовательным возбуждением идет вразнос.
Электродвигатель со смешанным возбуждением (рис. 3-6, в) отличается как большим начальным моментом вращения, так и возможностью широкого регулирования частоты вращения. Чтобы изменить направление вращения электродвигателя, надо изменить направление тока либо в обмотке возбудителя, либо в обмотке якоря. Если одновременно изменить направление тока в обмотке якоря и в обмотке возбудителя (например, поменять местами концы проводов у пускового рубильника), направление вращения двигателя не изменится.
В электродвигателях постоянного тока, как и в асинхронных двигателях, применяют электрическое торможение противовключением и динамическое торможение.

Рис. 3-7. Схема автоматизированного управления асинхронным двигателем с короткозамкнутым ротором.
Для автоматизированного управления асинхронными двигателями применяют комплекты аппаратуры, состоящие из контакторов, реле, сопротивлении и смонтированные на специальных панелях, которые называют станциями управления или магнитными станциями. Выпускаются стандартные магнитные станции для управления электроприводами на постоянном и переменном токе.
На рис. 3-7 показана схема автоматизированного управления асинхронным электродвигателем с короткозамкнутым ротором. В верхней части панели станции управления расположены рубильники Р, три реле максимального тока РМ и два предохранителя П. Для пуска нужно включить рубильник Р и нажать кнопку Пуск, после чего катушка вспомогательного контактора У обтекается током и контактор включает двигатель через последовательно включенные пусковые сопротивления СП. Одновременно с включением контактора У замыкается его первый блок-контакт У-1 без выдержки времени, а спустя некоторое время, достаточное для разгона электродвигателя на пониженном напряжении, замыкается второй блок-контакт У-2; обтекается током катушка линейного контактора Л, который включает электродвигатель на полное напряжение сети, минуя пусковое сопротивление СП. При перегрузках или коротких замыканиях срабатывает, как минимум, одно из трех реле максимального тока; при этом размыкается цепь питания катушек контакторов У и Л, и они отключают двигатель от сети. Цепь питания катушек можно разорвать также нажатием кнопки Стоп.
Схема автоматизированного управления асинхронным' двигателем с фазным ротором показана на рис. 3-8. При нажатии кнопки Пуск включится линейный контактор Л. Электродвигатель включается при полностью введенных в цепь ротора сопротивлениях. Одновременно включается блокировочное реле РБ, у которого замыкается нормально открытый контакт, и подается питание к катушкам контакторов ускорения 1У, 2У и 3У.
В цепь ротора включены токовые реле 1РУ—3РУ. Контакты токовых реле нормально замкнуты; при включении двигателя эти контакты размыкаются. Каждое токовое реле отрегулировано на определенный ток срабатывания. По мере разгона двигателя ток в роторе снижается и, когда он достигнет величины, на которую отрегулировано реле 1РУ, его контакт замкнется, после чего включится контактор ГУ и первая ступень сопротивлений в цепи ротора будет выведена.
По мере уменьшения тока в роторе будут последовательно срабатывать реле 2РУ и 3РУ и включаться контакторы 2У и 3У.
После включения контактора ЗУ сопротивление в роторе будет полностью зашунтировано — двигатель получит номинальное число оборотов.
В схемах автоматизированного управления многодвигательными приводами применяется электрическая блокировка, которая обеспечивает заданную последовательность пуска нескольких двигателей.
Эту схему применяют, например, на двухдвигательном фрезерном станке, когда включение двигателя подачи стола 2Д разрешается только при работающем электродвигателе вращения фрезы 1Д (рис. 3-9). Как видно из схемы, пуск двигателя 1Д осуществляется нажатием кнопки

Пуск 1 и не зависит от двигателя 2Д, который включится при замыкании блок-контакта 1К, т. е. при работе двигателя 1Д.
В качестве примера более сложной схемы на рис. 3-10 приведена схема автоматизированного управления токарным станком 1К62.
Привод станка состоит из четырех асинхронных двигателей с короткозамкнутым ротором: ДГ — 10 кВт, 1450 об/мин (главный привод); ДО — 0,125 кВт, 2 800 об/мин (привод насоса охлаждающей жидкости); ДТП — 1 кВт, 930 об/мин (привод гидросистемы) и ДБХ — 1 кВт, 1410 об/мин (привод быстрого хода суппорта).
Включение в сеть производится пакетным сетевым выключателем СВ.
Трансформатор Тр имеет две вторичные обмотки: на 36 В для ламп ЛО местного освещения станка и на 127 В для питания цепи управления станком. Лампа станка ЛО заземлена для защиты от пробоя напряжения сети на обмотку 36 В и попадания сетевого напряжения на корпус станка.
Нажатием кнопки Пуск включают катушку группового контактора КГ и пускают в ход двигатели ДГ, ДО и ДГП.

Рис. 3-9. Схема автоматизированного управления пуском двух двигателей в заданной последовательности.

Рис. 3-10. Схема автоматизированного управления токарно-винторезным станком модели 1К62.
Пакетный выключатель 2ВП позволяет при необходимости отключить двигатель насоса охлаждающей жидкости ДО. Двигатель гидросистемы ДГП может быть выключен вилкой штепсельного разъема ШР.
Двигатель быстрого хода суппорта ДБХ включается от путевого выключателя БК, замыкающего цепь контактора КБХ.

Рис. 3-11. Схема автоматизированного управления двигателем постоянного тока с параллельным возбуждением.
Путевой выключатель БХ связан с шлицевым валиком, работающим от рукоятки. установленной на суппорте.
После окончания обработки детали с помощью фрикционной муфты замыкается путевой выключатель КВ; при этом включается реле времени РВ, которое своим контактом размыкает цепь группового контактора КГ с определенной выдержкой времени.
На рис. 3-11 приведена схема автоматизированного управления двигателем постоянного тока с параллельным возбуждением при помощи электромагнитных реле времени 1РУ, 2РУ и контакторов ускорения 1У, 2У. После включения сетевого рубильника Р ток проходит по следующей цепи: обмотка 1РУ, якорь двигателя Я и две ступени пускового реостата r1 и r2, параллельно ток проходит по обмотке возбуждения ОВ. Катушка электромагнитного реле 1РУ имеет большое сопротивление, поэтому в образовавшейся цепи ток очень мал и двигатель на включение сетевого рубильника Р не реагирует, но реле 1РУ включается и его размыкающий контакт размыкается.
Затем кнопкой Пуск включается линейный контактор КЛ. В цепи якоря появляется ток, и двигатель пускается в ход с небольшим числом оборотов, так как последовательно с яко рем включены обе ступени пускового реостата. Одновременно с пуском в ход двигателя катушка реле 2РУ попадает под напряжение и его размыкающий контакт в цепи катушки 2У размыкается. При включении контактора КЛ замыкается его блок-контакт и блокирует кнопку Пуск; ее можно отпустить. Контактором КЛ закорачивается катушка реле 1РУ; якорь реле 1РУ отпадает и его размыкающий контакт в цепи катушки 1У замыкается.
Вслед за этим включается контактор ускорения 1У. Включением контактора 1У накоротко замыкается первая ступень пускового реостата r1 и катушка реле 2РУ. Реле 2РУ срабатывает с заранее установленной выдержкой времени; его контакт 2РУ замыкается и включается контактор 2У. Включением контактора 2У накоротко замыкается вторая ступень реостата r2, и якорь получает полное рабочее напряжение сети. На этом пуск электродвигателя заканчивается.
Автоматическое регулирование частоты вращения двигателе й может быть осуществлено по системе Г—Д (генератор—двигатель) при помощи ионного электропривода с применением электромашинного и магнитного усилителей по схеме электрического вала и др.
Ниже приводятся описания принципов автоматического регулирования частоты вращения на упрощенных схемах.

Рис. 3-12. Схема регулирования частоты вращения двигателя параллельного возбуждения по системе генератор—двигатель.
Система Г—Д (рис. 3-12) имеет на одном валу трехфазный двигатель ДП, генератор постоянного тока ГПТ с возбудителем постоянного тока В. Приводной двигатель постоянного тока ДПТ с параллельным возбудителем питается от генератора ГПТ и возбудителя В. После запуска трехфазного двигателя ДП разворачивают до номинальной двигатель ДПТ, постоянно повышая на нем напряжение с помощью реостата Р2. Повышение частоты вращения двигателя ДПТ достигается уменьшением его тока возбуждения реостатом Р^ при неизменном напряжении генератора ГПТ. В системе Г—Д максимальная частота вращения может превышать минимальную в 20—30 раз.
Переключатель П изменяет направление тока в обмотке возбуждения генератора ГПТ. Это вызывает соответственное изменение направления тока в якоре двигателя ДПТ, а следовательно, и направление его вращения на обратное.
Для привода механизмов с резкими колебаниями (толчками) нагрузки, например для прокатных станов, применяют систему Г—Д с маховиком, посаженным на вал агрегата Г—Д. При резком повышении нагрузки частота вращения агрегата, питающего электродвигатель ДПТ, падает; в этот момент большая масса маховика, накопившая запас кинетической энергии, удерживает прежнюю скорость вращения и производит сглаживающее действие. При снижении нагрузки частота вращения питающего агрегата повышается, вместе с этим увеличивается частота вращения маховика, который вновь накапливает запас энергии.
Электромашинный усилитель (ЭМУ) представляет собой небольшой агрегат, состоящий из спаренных на одном валу двигателя переменного тока и генератора постоянного тока, который имеет две пары щеток, сдвинутых под углом 90°, причем одна пара щеток соединена накоротко.

Рис. 3-13. Принцип действия электромашинного усилителя с поперечным полем.
На рис. 3-13 показан принцип работы наиболее распространенного ЭМУ с поперечным полем. Обмотка возбуждения ОУ, называемая обмоткой управления, создает магнитный поток Ф1. Поскольку якорь, вращаясь, пересекает поток Ф1, в его проводниках возникает ток, направление которого показано крестиками (от нас) и точками в кружках (к нам).
В свою очередь ток в обмотке якоря создает магнитный поток Ф2, перпендикулярный к потоку Ф1 и называемый поперечным потоком реакции якоря. Направление поперечного потока остается неизменным, а так как проводники якоря его непрерывно пересекают, в них возникает э. д. с., направление которой показано крестиками и точками без кружков. Эту э. д. с. можно снять через вторую пару щеток (на схеме вертикальную) и питать внешнюю нагрузку. Регулируя небольшую величину тока возбуждения в обмотке ОУ, можно соответственно увеличить или уменьшить величину тока в цепи внешней нагрузки ЭМУ. Кроме потоков Ф1 и Ф2 в якоре ЭМУ от нагрузочного тока создается еще продольный поток реакции Ф3, направленный навстречу потоку Ф1 и ослабляющей его. Для компенсации потока Ф3 служит компенсационная обмотка КО. Следует отметить, что ЭМУ обычно имеют несколько обмоток управления, взаимодействующих в сложных схемах.

Рис. 3-14. Принцип действия магнитного усилителя.
Магнитные усилители с помощью постоянного тока малой мощности позволяют регулировать переменный ток значительно большей мощности. Достоинством магнитных усилителей является отсутствие в них движущихся частей, поэтому они получают все более широкое применение в системах автоматического управления. Принцип действия магнитного усилителя показан на рис. 3-14. Два стальных сердечника из высококачественной никелевой стали (пермаллоя) имеют две обмотки: управляющую У постоянного тока и главную — переменного тока, состоящую из двух последовательно соединенных обмоток Г1 и Г2. Направление тока главных обмоток Г1 и Г2 таково, что создаваемые ими магнитные потоки по отношению к управляющей обмотке направлены навстречу друг другу (показано стрелками) и, таким образом, не наводят в управляющей обмотке переменной э. д. с. Если в управляющей обмотке У нет постоянного тока, магнитный усилитель представляет собой по существу дроссель с большим индуктивным сопротивлением, включенным в цепь переменного тока последовательно с нагрузкой; при этом величина переменного тока, питающего нагрузку Н, незначительна.
Подавая в управляющую обмотку У постоянный ток небольшой мощности, подмагничивают сердечник, при этом индуктивное сопротивление обмоток Г1 и Г2 падает и соответственно возрастает ток в цепи нагрузки переменного тока Н.
Рассмотрим пример применения электромашинного усилителя в схемах регулирования скорости электродвигателей.
На рис. 3-15 показана упрощенная схема управления двигателем постоянного тока по системе Г—Д с применением электромашинного усилителя, который здесь выполняет роль возбудителя генератора Г, питая постоянным током его обмотку возбуждения ОВР. Усилитель ЭМУ имеет две обмотки управления 1УО и 2УО. Обмотка 1УО присоединена через реостат к цепи постоянного тока от вспомогательного источника, а обмотка 1УО подключена к тахогенератору ТГ. Тахогенератор представляет собой маленький генератор постоянного тока, находящийся на одном валу с электродвигателем Д, Обмотка возбуждения тахогенератора ОВТР имеет независимое питание от основного возбудителя ОВД.
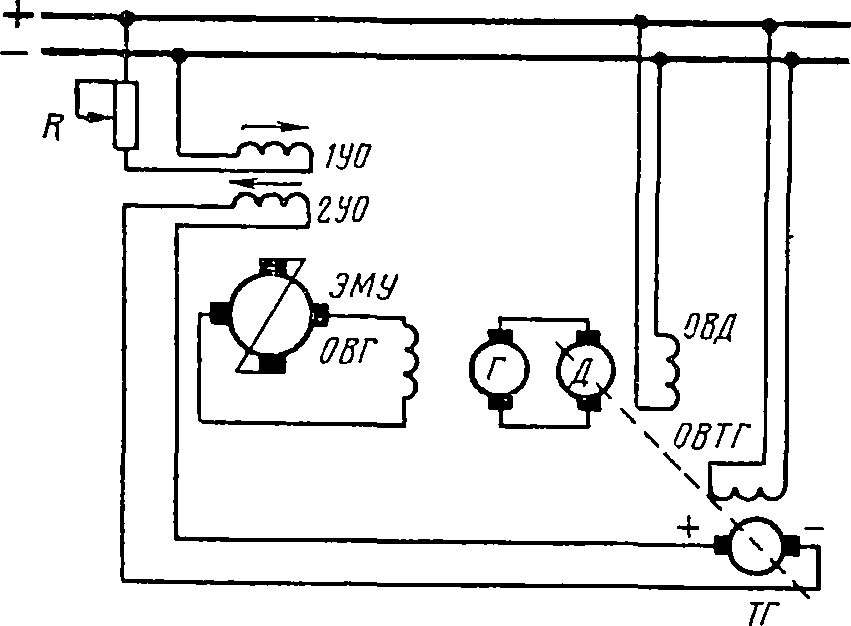
Рис. 3-15. Схема управления двигателем постоянного тока, работающим по системе Г—Д с применением электромашинного усилителя.

Рис. 3-16. Принцип работы электрического вала с вспомогательными асинхронными двигателями.

Рис. 3-17. Схема бесконтактного аппарата на базе магнитного усилителя.
Электрический вал представляет собой систему двух (или большего числа) механизмов, двигатели которых, не будучи связаны между собой механически, имеют такую электрическую связь, при которой частота их вращения автоматически поддерживается одинаковой (синхронной). Существуют различные схемы электрического вала. Одна из них, наиболее простая, показана на рис. 3-16. Механизмы 1 и 2, не связанные между собой механическим валом, имеют приводные двигатели 1Г и 2Г. Вместе с этими двигателями на одном валу с каждым из них вращаются вспомогательные асинхронные двигатели 1В и 2В. Роторы вспомогательных асинхронных двигателей, имеющие фазную об мотку с кольцами, электрически соединены между собой, а их статоры присоединены к одной и той же сети.
При увеличении нагрузки на вал двигателя 1Г частота вращения его уменьшается относительно частоты вращения двигателя 2Г. При одинаковой частоте вращения двигателей 1Г и 2Г в роторах двигателей 1В и 2В нет тока, так как э. д. с. обоих роторов одинаковы и направлены навстречу друг другу. Если же частота вращения двигателя 1Г по отношению к частоте вращения двигателя 2Г понизится, в цепи ротора появится уравнительный ток, обусловленный разностью э. д. с. Ток пойдет в направлении от ротора 2В к ротору 1В и несколько повысит нагрузку на машину 2В (генераторный режим), вследствие чего частота вращения ее уменьшится. У машины 1В частота вращения, наоборот, несколько увеличится, поскольку ее режим становится двигательным. Таким образом, происходит выравнивание частоты вращения двигателей 1Г и 2Г.
Электрический вал применяют для электропривода тяжелых станков, ворот шлюзов, т. е. там, где приводные двигатели, работающие со строго одинаковой частотой вращения, расположены на значительном расстоянии друг от друга и не могут быть соединены общим механическим валом.
Схемы управления с применением бесконтактных аппаратов в последние годы широко используются в электроустановках различного назначения. Бесконтактные аппараты работают обычно на базе магнитных усилителей или полупроводниковых вентилей. Поскольку в бесконтактных аппаратах отсутствуют подвижные элементы, они являются более падежными и быстродействующими, допускают большую частоту отключений.
Принципиальная схема бесконтактного аппарата на базе магнитного усилителя показана на рис. 3-17. К источнику переменного тока подключены последовательно обмотки нагрузки и мостиковый выпрямитель В1. Выпрямленный ток проходит через обмотку обратной связи ωо.с и сопротивление нагрузки Rн.
Второй мостиковый выпрямитель В2 через сопротивления Rд и Rсм подключен также к источнику переменного тока и питает обмотку смещения ωсм.
Обмотку управления ωу подключают через регулируемое сопротивление Rу к вспомогательному источнику постоянного тока. Подбором сопротивлений Rд и Rсм и регулированием малым током с помощью сопротивления Rу можно получить различные токи нагрузки как по величине, так и по направлению.