В основе разработки системы автоматического регулирования температурным режимом ЭНУ лежат задачи выбора рациональной схемы и наиболее подходящего типа регулятора, а также параметров его настройки.
При выборе типа регулятора прежде всего следует определить характер действия регулятора — непрерывный, релейный или импульсный. Такой выбор для установок с самовыравниванием ориентировочно делают, исходя из значения отношения времени запаздывания Тз к постоянной времени Т:

Для автоматизации установок без самовыравнивания аналогичным образом рассматривается отношение времени запаздывания Тз к времени разгона Та.
Пропорциональные регуляторы позволяют устойчиво регулировать температуру любой электронагревательной установки.
Простейшая схема пропорционального регулирования электропечи показана на рисунке 18.2,а. Нагреватель Е1 электропечи A1 является нагрузкой блока питания А2, выполненного на магнитных усилителях. Обмотка управления А2 входного каскада магнитного усилителя получает питание от реостатного задатчика R3 электронного потенциометра АЗ с 10%-ной зоной пропорциональности и термопарой В1.
В начале разогрева движок реостатного задатчика R3 занимает крайнее положение и в обмотку управления подается максимальный ток. Блок питания выдает полную мощность Рн (рис. 18.2,6). По мере разогрева мощность снижается до значения Р1. обеспечивающего заданную температуру регулирования. Для усиления сигнала между измерительным прибором А3 и блоком питания А2 включают регулирующее устройство U1, представляющее собой пропорциональный электронный усилитель с регулируемым коэффициентом усиления и определяющее показатели переходного процесса регулирования.
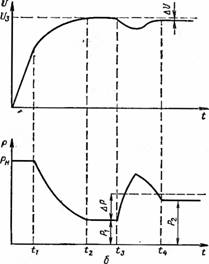

Рис. 18.2. Схема пропорционального регулирования температуры электропечи сопротивления (а) и переходный процесс регулирования (б):
A1 — электрическая печь с резистивным нагревателем E1; А2 — силовой блок питания на магнитных усилителях; А3 — электронный потенциометр с реостатным задатчиком R 3; С2 — электронный усилитель; FI, F2 — автоматические выключатели; В1 — термопара.
При нарушении теплового режима печи в момент tз (например, при открытии дверцы), связанным с увеличением потребляемой мощности на АР, температура печи начнет снижаться, а мощность возрастать. После некоторого переходного процесса установится новое положение равновесия с погрешностью регулирования ДФ и повышенной мощностью Рг.
Важным элементом системы автоматического регулирования непрерывного действия, определяющим ее общую стоимость, является силовой блок питания. Трехфазные блоки питания на магнитных усилителях типа РУТ выпускаются мощностью от 11,5 до 190 кВт.
В последнее время используют блоки с тиристорным управлением мощности нагревательной установки. Такое устройство компактно, оно надежно работает в агрессивных условиях сельского хозяйства.
Наиболее распространены фазовые схемы управления с использованием статических фазорегуляторов и промежуточных магнитных усилителей (рис. 18.3). На обеих схемах тиристор включается лишь во время той части положительного полупериода сетевого напряжения, которой соответствует положительное направление тока в управляющей цепи. Изменяя плавно фазу напряжения f/a6 при помощи сопротивления R1 (рис. 18.3, а) или ток обмотки управления ( магнитного усилителя Т2 (рис. 18.3,6), можно плавно изменять фазовый угол открытия тиристора, а следовательно, эффективное напряжение питания и мощность электронагревателя Е. В мощных электронагревательных установках используют трехфазные тиристорные схемы управления типа РНТТ с соответствующими блоками управления одновременно всеми тиристорами. Они выпускаются мощностью 36, 63, 144 кВт и более.

Рис. 18.3. Схема управления тиристором статическим фазорегулятором (а) и однопол5периодным магнитным усилителем (б).
Однако наиболее распространены двух- и трехпозиционные релейные регуляторы. Такие регуляторы имеют два или три по поженил исполнительного органа. Одно из положений — максимальное — выбирается таким, чтобы подводимая мощность была заведомо больше потребляемой. 3 этом положении регулируемая температура всегда возрастает. Во втором положении (минимальном) подводимая мощность меньше потребляемой, что вызывает снижение регулируемой температуры. Третье положение исполнительного устройства промежуточное.
Простейшая схема двухпозиционного регулирования температуры воды в емкостном электроводонагревателе при помощи ТЭНов показана на рисунке 18.4. Чувствительный элемент термореле Е1, заключенный в герметический патрон, находится в воде.
При разомкнутом выключателе S3 ТЭНы отключаются от сети по достижении заданной температуры воды при помощи минимального контакта термореле Е1-1, отключающего контактор К.

Рис. 18.4. Схема двухпозиционного регулирования температуры электроводонагревателя (о) и переходной процесс регулирования (б):
A1 — электроводонагреватель; К1 — магнитный пускатель: Е1 — термореле, S1, S2 — кнопочные выключатели; S3- выключатель; R1 — добавочное сопротивление; F1 — автоматический выключатель.
Контакт E1-2 служит для повышения быстродействия при срабатывании катушки пускателя К.
Схема в автоматическом режиме (выключатель S3 замкнут) работает следующим образом. Если температура воды ниже заданной, то минимальный контакт термореле Е1-1 замкнут и контакты пускателя К включены. К ТЭНам подведена полная мощность Р, и температура воды начинает возрастать (рис. 18.4,6). При нагреве воды до температуры![]() минимальный контакт Е1-1
минимальный контакт Е1-1
размыкается, пускатель К1 отключает ТЭНы и температура воды начинает снижаться. При температуре![]() минимальный контакт Е1-1 вновь замыкается, ТЭНы включаются и температура воды опять начинает расти, цикл повторяется.
минимальный контакт Е1-1 вновь замыкается, ТЭНы включаются и температура воды опять начинает расти, цикл повторяется.
Таким образом, процесс двухпозиционного регулирования температуры установки состоит в колебании ее, по «пилообразной» кривой вокруг заданного среднего значения в пределах зоны нечувствительности регулятора![]()
Зона нечувствительности современных позиционных регуляторов может быть весьма небольшой и составлять значение в десятые доли градуса (в худшем случае не превышает 3... 7°С).
Однако действительные колебания температуры бывают во много раз больше. Это связано с большим временем запаздывания в результате тепловой инерции чувствительного элемента, особенно при использовании массивных защитных чехлов.
В качестве чувствительных элементов температуры принимают биметаллические, дилатометрические и монометрические термореле, контактные термометры, термопары, термометры сопротивления и термисторы (полупроводниковые термозависимые сопротивления). Постоянная времени Т и чистое запаздывание Т3 в зависимости от конструкции и условий теплообмена колеблются от 1 до 20 с и выше.
Амплитуда автоколебаний температуры ДА (°С) при двухпозиционном регулировании будет тем больше, чем больше общее запаздывание Та (с), чем больше избыток подводимой мощности Ри (Вт) над потребляемой Рп (Вт) и чем меньше общая теплоемкость установки
![]() 08.5).
08.5).
где М — масса, кг; с„ — удельная теплоемкость Дж/(кг-°С).
Для повышения точности регулирования температуры время запаздывания чувствительного Элемента должно быть в несколько раз меньше, чем у самой установки.
Колебания температуры зависят и от расположения чувствительного элемента в зоне нагрева. При его приближении к нагревателю частота колебаний температуры увеличивается, а амплитуда падает.
Уменьшение амплитуды колебаний температуры можно достичь, регулируя некоторую часть мощности нагрева (мощность регулирования) при постоянно включенной остальной части мощности (базовой мощности).
Важной эксплуатационной характеристикой, определяющей выбор и надежность коммутационной аппаратуры при двухпозиционном регулировании, является частота включения регулятора (1/с), определяемая из формулы
![]() (18.6)
(18.6)
где тц — время цикла «включено — выключено», с; Фу — установившаяся температура (без регулятора), °С-Ср — средняя температура регулирования, °С.
С уменьшением амплитуды автоколебаний температуры частота включения регулятора увеличивается.
При трехпозиционном регулировании можно получить три ступени мощности, например, путем переключения его нагревателей с «треугольника» на «звезду» и отключения нагревателей. При этом одновременно с повышением точности регулирования уменьшается частота включения регулятора.
В качестве примера рассмотрим устройство и принцип действия полупроводникового трехпозиционного регулятора температуры ПТР-3 (рис. 18.5).

Рис. 18.5. Принципиальная электрическая схема трехпозиционного полупроводникового терморегулятора ПТР-3.
Термистор R8 регулятора представляет собой выносной датчик, смонтированный в защитном кожухе. Остальные элементы размешены в пластмассовом кожухе и крепятся на монтажной панели. На лицевую часть кожуха под стеклом выведены рукоятки задатчиков температуры R2 и дифференциала R6 со шкалами.
К измерительному мосту, состоящему из сопротивлений R1, R7, подводится напряжение переменного тока от обмотки трансформатора с выводами а—а. Напряжение разбаланса моста складывается с постоянным (выпрямленным) напряжением опорного сигнала, задаваемого обмоткой трансформатора б—б, который определяет общий дифференциал регулятора — разность температур трехпозиционного регулирования. Когда температура объекта регулирования равна заданной сопротивлением R2, мост сбалансирован и сигнал на выходе отсутствует.
Если температура объекта отличается от заданной, баланс моста нарушается и появляется сигнал, пропорциональный отклонению температуры, с полярностью, соответствующей направлению разбаланса.
Сумма опорного сигнала и сигнала разбаланса подается на вход первого каскада двухкаскадного усилителя, собранного на транзисторах VI и V2. В зависимости от полярности суммы этих сигналов транзистор V3 открывается в один из полупериодов переменного тока от обмотки g—g и усиленный одним из транзисторов V4 или V5 второго каскада усилителя, вызывает опрокидывание триггерной схемы, собранной на транзисторах V6 и V7, и срабатывание одного из исполнительных реле К1 или К2. Эти реле используются для включения различных ступеней мощностей нагревателей.
На базе рассмотренной схемы выпускаются также двухпозиционный (ПТР-2) и пропорциональный (ПТР-П) регуляторы температуры. Для работы в агрессивных условиях животноводческих помещений применяют высоконадежные регуляторы типа РТБ и другие, имеющие бесконтактный выход исполнительного устройства.