Глава 9. РЕГУЛИРОВАНИЕ СКОРОСТИ В ЭЛЕКТРОПРИВОДАХ. ВЫБОР РЕЗИСТОРОВ
ОСНОВНЫЕ ПОКАЗАТЕЛИ РЕГУЛИРОВАНИЯ СКОРОСТИ
Регулированием скорости электропривода называют принудительное изменение скорости исполнительного органа энергетического машинного устройства. Изменяется скорость при дополнительном воздействии на электродвигатель со стороны управляющего и преобразовательного устройств или при помощи специальных механических передач. В настоящее время чаще применяют электрическое регулирование. В этом случае упрощается кинематическая схема машинного агрегата, улучшаются технико-экономические показатели. Такой электропривод представляет собой более совершенную форму привода, способствующую автоматизации технологических процессов, повышению производительности машин, улучшению качества выпускаемой продукции.
Основными критериями, которыми руководствуются при выборе способа регулирования скорости, являются диапазон, плавность, экономичность регулирования и стабильность работы на заданной скорости.
Диапазон изменения скорости определяется отношением значений наибольшей и наименьшей скоростей при номинальной нагрузке двигателя.
Плавность регулирования характеризуется числом ступеней внутри диапазона регулирования: чем больше ступеней, тем больше плавность.
Экономичность регулирования оценивается по приведенным затратам, которые зависят в основном от потерь энергии и капитальных вложений.
Стабильность работы определяется жесткостью механических характеристик двигателя.
Регулируемые приводы применяют в кормоприготовительных агрегатах и на раздаче корма, в сенажной башне для равномерного разбрасывания травяной массы и вентиляционных установках животноводческих помещений, в металлорежущих станках и испытательных установках ремонтных предприятий. Область применения их с каждым годом расширяется.
РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
В электроприводах с плавным, в большом диапазоне регулированием скорости обычно применяют двигатели постоянного тока.
Из уравнений (8.5) и (8.7) вытекает, что возможны три способа принудительного изменения скорости:
уменьшением магнитного потока; изменением напряжения на якоре, увеличением сопротивления якорной цепи.

Рис. 9.1. Электромеханические (а) и механические (б) характеристики двигателя с независимым возбуждением:
1 — при уменьшении тока возбуждения; 2 — при снижении напряжения на якоре.
Уменьшить ток возбуждения, а вместе с ним и магнитный поток электродвигателя с независимым возбуждением можно при помощи переменного резистора или регулируемого источника питания.
Так как ток обмотки возбуждения невелик (не более 5% от номинального), аппараты эти просты и недороги, а потери энергии в них малы.
Из рисунка 9.1 (в зоне 1 показаны механические и электромеханические характеристики электродвигателя при разных магнитных потоках, причем Ф2<Ф1<Фн) наглядно видно, что угловая скорость увеличивается с уменьшением магнитного потока. На холостом ходу скорость обратно пропорциональна величине магнитного потока.
Если есть момент сопротивления, скорость снижается, но если Мс не слишком велик, она остается большей, чем при номинальном магнитном потоке.
Для серийных электродвигателей допускается двукратное увеличение частоты вращения, для специальных — трехкратное. Большое увеличение скорости сопряжено с опасностью механических повреждений и сильным искрением щеток.
Если момент сопротивления постоянен, то с ослаблением магнитного потока ток в якоре возрастает. Двигатель надо выбирать с учетом этого обстоятельства или уменьшать момент нагрузки по мере увеличения частоты вращения, то есть осуществлять регулирование при постоянной мощности. Механические характеристики по мере ослабления магнитного потока становятся менее жесткими.
Искусственные механические и электромеханические характеристики электродвигателя при изменении напряжения на зажимах якоря, которые приведены в виде графиков на рисунке 9.1 (а, б) (зона II), параллельны естественной, следовательно, жесткость их не меняется. Это позволяет снижать частоту вращения в 5... 6 раз по сравнению с номинальной и иметь достаточно стабильный скоростной режим.
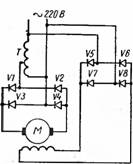
Рис. 9.2. Схема регулируемого электропривода постоянного тока системы регулируемый автотрансформатор — выпрямитель— двигатель:
Т — автотрансформатор; М — электродвигатель; VI... VS диоды.
Регулирование скорости можно осуществлять с постоянным моментом сопротивления, не завышая номинальную мощность электродвигателя. Пуск двигателя осуществляется на пониженном напряжении.
В качестве источника питания — регулятора напряжения применяют устройства, которые преобразуют переменный ток в постоянный и регулируют значение выпрямленного напряжения. Обмотка возбуждения подключается к отдельному нерегулируемому преобразователю.
Наиболее простой регулятор-преобразователь (рис. 9.2) состоит из регулируемого автотрансформатора Т и выпрямительного моста. Напряжение плавно регулируется автотрансформатором, затем выпрямляется диодами. Обмотка возбуждения электродвигателя в этом приводе получает питание от выпрямителя, подключенного к той же сети переменного тока.
Механические характеристики электродвигателя при такой схеме включения менее жесткие, чем естественная, из-за дополнительных потерь напряжения в автотрансформаторе и диодах. Такая схема применяется в приводах мощностью до 1 ... 2 кВт.
Электропривод системы генератор — двигатель имеет электромашинный агрегат, который преобразует переменный трехфазный ток в постоянный регулируемого напряжения при помощи асинхронного двигателя и генератора постоянного тока. Напряжение генератора изменяется за счет тока в обмотке возбуждения. Эта система, называемая сокращенно Г—Д, применима для любых мощностей. Недостатки — большая металлоемкость, наличие вращающихся машин, низкий к. п. д.
В последнее время широко применяют дроссельные и тиристорные преобразователи — регуляторы, устройство которых описывается в главе 13. С этими преобразователями выпускаются комплектные электроприводы.
Например, приводы ПМУ состоят из регулятора напряжения с магнитным усилителем и электродвигателя.
Наиболее перспективны тиристорные электроприводы. Комплектные тиристорные электроприводы серии ЭТО выпускаются на мощность от 0,1 до 1,7 в четырех модификациях. В комплект электропривода ЭТО1 (рис. 9.3) входят: электродвигатель постоянного тока М, тиристорный преобразователь ГП, сглаживающий дроссель L, регулятор скорости RC, промежуточный полупроводниковый усилитель У, система импульсно-фазового управления и блок питания цепей управления.
Тиристорный преобразователь собран на однофазной мостовой неуправляемой схеме с диодами VI ...V4 и тиристором V6, система управления тиристором содержит импульсный трансформатор Т2 и фазосдвигающее устройство, состоящее из генератора пилообразного напряжения ГПН и формирователь импульсов ФИ. Привод представляет собой замкнутую систему автоматического управления с обратной отрицательной связью по противо-э.д.с. и положительной по току двигателя, снятой с тахомоста (R2, R3), обеспечивающую регулирование угловой скорости в диапазоне 1 : 20 с перепадом скорости не более 10%.
Стабильность скорости обеспечивается тем, что на вход усилителя У подается напряжение, равное разности двух: тахомоста Uм и регулятора задатчика скорости U3. За счет этого уменьшение э. д. с. и увеличение тока автоматически приводят к тому, что усиленный сигнал на выходе усилителя обеспечивает более раннее открытие тиристора и стабилизацию напряжения.
Пуск электродвигателя форсированный, с ограничением форсировки стабилитроном V7 и углом упреждающего токоограничения V8, R5, поддерживающих пусковой ток в пределах (1,5... 2). Динамические характеристики обеспечиваются также корректирующей цепочкой R1, С1. Тиристор защищен от перенапряжений на сторонах постоянного и переменного тока цепочками RC.

Рис. 9.3. Электрическая принципиальная схема комплектного однофазного тиристорного электропривода постоянного тока.
Изготовляются более мощные комплектные тиристорные электроприводы, например ПТЗ, с питанием от трехфазной цепи мощностью до 8 кВт, в которых стабилизация скорости обеспечивается за счет отрицательной обратной связи по скорости, получаемой при помощи тахогенератора.
Регулирование частоты вращения электродвигателей введением резисторов в цепь якоря (реостатное регулирование) применяют только для двигателей малой мощности. При включении резистора скорость уменьшается.
Диапазон регулирования не постоянен, зависит от нагрузки и не превышает 1 : 3. Искусственные характеристики имеют малую жесткость. Регулирование связано с большими дополнительными потерями энергии, которая в виде тепла выделяется в регулировочном реостате. Резисторы из за этого получаются громоздкими. Особенно велики потери при регулировании с постоянным моментом.
Реостатное регулирование применяют как основной способ в электроприводах с двигателями последовательного возбуждения небольшой мощности и универсальными.
Потери энергии в роторной цепи велики, они пропорциональны моменту и скольжению.
ВЫБОР РЕЗИСТОРОВ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Для пуска и регулирования частоты вращения двигателей, асинхронных с фазным ротором и постоянного тока, необходимы резисторы или регуляторы напряжения.
Ручной пуск осуществляют при помощи стандартных переменных резисторов (пусковых реостатов).
Пусковые реостаты серии РП предназначены для ручного пуска двигателей постоянного тока мощностью до 4 кВт, реостаты РЗП для двигателей от 4 до 42 кВт.
Серия РП имеет один типоразмер, серия РЗП — 5 типоразмеров.
При одинаковом размере пусковые реостаты различаются номинальными токами элементов и числом ступеней. Реостат РЗП-2, например, имеет номинальный ток до 40 А, число ступеней 7. Они предназначены для двигателей мощностью до 7 кВт.
Для пуска двигателей с фазным ротором изготовляют пусковые реостаты с масляным охлаждением типов ПР-17,5 и ПР-29,5. Первый предназначен для двигателей мощностью до 17,5 кВт, второй— для двигателей мощностью до 29,5 кВт. Реостаты допускают от 5 до 3 пусков подряд, длительность одного пуска не должна быть более 10... 18 с.
Технические параметры пусковых реостатов приводятся в справочниках, и выбирать тот или иной тип реостата следует в соответствии с номинальными данными электродвигателя.
При автоматизированном пуске двигателей используют стандартные ящики резисторов, выпускаемых нашими заводами. Их применяют в качестве пусковых, пускорегулировочных, тормозных и регулировочных сопротивлений для двигателей постоянного и переменного тока. Ящики резисторов ЯС-1 состоят из 40 чугунных литых элементов, каждый из которых может иметь сопротивление от 0,28 до 0,038 Ом; длительно допускаемый ток от 20 до 55 А. Выпускаются ящики резисторов с фехралевыми и константановыми элементами, рассчитанные на меньшие токи и большие сопротивления.
Для того чтобы выбрать тот или иной ящик резисторов, надо рассчитать число ступеней и значения их омических сопротивлений. Эти расчеты для двигателей независимого возбуждения и двигателей с фазным ротором одинаковы.
Для расчета пусковых резисторов могут быть заданы два условия.
- Известно число ступеней пускового сопротивления т.
- Неизвестно число ступеней сопротивления.
При автоматизированном управлении приходится особенно считаться с числом ступеней, так как каждая ступень требует установки дополнительных реле и контакторов. Для приводов средней мощности число ступеней принимают обычно 2...4.
При графическом методе расчета чертят семейство механических характеристик электродвигателя таким образом, чтобы обеспечить рациональный пуск, для этого:
чертят естественную характеристику двигателя 1 (рис. 9.6) в относительных единицах;
задаются значениями максимального момента М1, момента переключения при пуске М2 и проводят вертикальные пунктирные линии;
наносят искусственные характеристики 2 и 3.
Прямая 2 проходит через точки идеального холостого хода О и начального пускового момента А. Прямую 3 проводят из точки О в точку В, находящуюся на линии момента М1 в месте пересечения прямой 2 с вертикальной линией момента М2. Данная пусковая диаграмма соответствует рациональному ступенчатому пуску.
При включении двигателя с двумя резисторами (точка А) он начинает разгоняться. Когда момент снизится до величины М2, резистор R2 шунтируется и двигатель переходит на новую характеристику 3 в точку В. Момент двигателя снова возрастает до значения M1. Последующий разгон и переход на новую характеристику осуществляется аналогично.