13.3. ПРИНЦИПЫ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
Управление пуском. Пуск двигателей постоянного тока производится постепенным включением пусковых сопротивлений, регулирующих величину пускового тока в допустимых пределах. В этих случаях система управления должна следить за ходом пускового процесса и своевременно выключать ступени пускового реостата. Из пусковой диаграммы с двумя ступенями пускового реостата следует, что ступени реостата должны выключаться при определенной частоте вращения двигателя, определенном значении тока и через определенные промежутки времени. Поэтому управление пуском двигателя может быть осуществлено в функции частоты вращения, в функции тока и в функции времени.
На рисунке 13.3 изображена схема автоматического пуска двигателя постоянного тока параллельного возбуждения в функции э. д. с. — Е, являющейся параметром частоты вращения.
Момент срабатывания каждого из включенных на якорь электромагнитных реле К1 и К2 посредством добавочных резисторов R5 и R6 настроен на определенную э. д. с.
В начальный момент пуска напряжение на участке цепи а — б равно падению напряжения в якоре двигателя. По мере возрастания скорости увеличивается э. д. с. двигателя и напряжения на вышеуказанном участке цепи. Когда скорость достигнет величины омега-1, срабатывает реле К1, которое через свой замыкающий контакт подаст сигнал на управляющий электрод тиристора V2. Последний откроется и зашунтирует первую ступень пускового реостата. Таким же образом включается тиристор V2 по достижении двигателем частоты вращения омега-2, при этом пуск будет закончен.
Сопротивления резисторов R5 и R6 могут быть определены из следующих выражений:
 (13.1)
(13.1)
где Ucp—напряжение срабатывания реле; г—сопротивление обмотки реле; U1 и 2 — напряжение на зажимах якоря по достижении соответствующих частот вращения. Поскольку напряжение на зажимах якоря равно сумме э. д. с. двигателя и падения напряжения на якоре, то
(13.2)
![]() (13.2)
(13.2)
На рисунке 13.4 показана схема управления пуском двигателя в функции времени, где для получения выдержки используется электромагнитное реле, обмотка которого шунтирована конденсатором и подключена параллельно первой ступени реостата через резистор R3.

Рис. 13.3. Схема автоматического пуска двигателя в функции ЭДС.
По истечении некоторого времени после включения линейного контактора К1 включится реле К2, которое своим замыкающим контактом подаст напряжение на управляющий электрод тиристора VI. При шунтировании тиристором первой ступени реостата конденсатор С начнет разряжаться на обмотку реле, последнее, отсчитав новую задержку, подаст положительный потенциал на управляющий электрод тиристора 2.
При управлении в функции частоты вращения исключается перегрузка двигателя по току, однако при глубоком снижении напряжения и чрезмерном увеличении момента сопротивления могут выйти из строя пусковые резисторы.
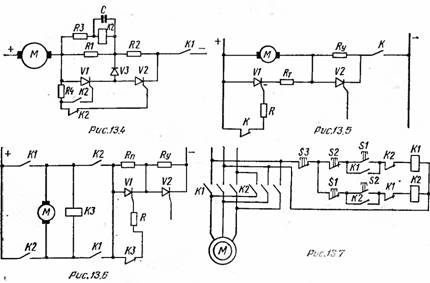
Рис. 13.4. Схема автоматического пуска двигателя постоянного тока в функции времени.
Рис. 13.5. Схема управления электродинамическим торможением.
Рис. 13.6. Схема управления ступенью противовключения.
Рис. 13.7. Схема управления реверсивным магнитным пускателем.
Управление пуском в функции времени свободно от этого недостатка.
Управление торможением. Схема автоматического управления электродинамическим торможением двигателя постоянного тока показана на рисунке 13.5. При отключении линейного контактора К его размыкающий контакт замыкается, подключая управляющий электрод тиристора к положительному полюсу якоря. Последний открывается и включает якорь двигателя на сопротивление. Происходит электродинамическое торможение. По мере снижения частоты вращения уменьшается э. д. с. двигателя и при некоторой минимальной скорости тиристор VI закроется. Торможение до полной остановки будет происходить под действием момента сопротивления.
Интенсивность электродинамического торможения определяется током в якорной цепи, который зависит от значения сопротивления R-t, расчет которого выполняют исходя из известных значений допустимого в начале торможения тока и максимально возможной величины э. д. с, двигателя, получаемой в начальный момент торможения. ![]() (13.3)
(13.3)
то отсюда легко получить формулу для расчета
![]() (13.4)!
(13.4)!
Практически можно принять Ema.xttU, з /доп^ (2... 2,5) /и-
Торможение противовключением применяется в реверсивных электроприводах, где вслед за торможением происходит изменение направления вращения. В период противовключения э. д. с. действует согласно с напряжением сети и ток в двигателе может значительно возрасти.
Для ограничения тока в якорную цепь двигателя, помимо пусковых резисторов, вводится ступень сопротивления противовключения, которая должна быть зашунтирована по окончании торможения, то есть при частоте вращения двигателя, близкой к нулю. Расчет ступени противовключения проводится так же, как и при электродинамическом торможении, по известным величинам.
Так как в режиме противовключения э. д. с. действует согласно с напряжением, то
![]() (13.5У
(13.5У
где Яу — сопротивление пусковых ступеней; Ra — сопротивление противовключения.
Так как при электродинамическом торможении э. д. с. двигателя уравнивается падением напряжения в якорной цепи. Управление ступенью противовключения осуществляется при помощи реле противовключения КЗ, подключенного параллельно якорю двигателя (рис. 13.6).
Реле КЗ должно отключиться в момент, когда скорость двигателя и его э. д. с. близки к нулю. При этом открывается тиристор VI и ступень противовключения оказывается зашунтированной.