Глава 8. ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ В ЭЛЕКТРОПРИВОДЕ
ОБЩИЕ СВЕДЕНИЯ О МЕХАНИЧЕСКИХ И ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИКАХ ЭЛЕКТРОДВИГАТЕЛЕЙ.
Механической характеристикой электропривода называется зависимость установившейся скорости исполнительного органа энергетического машинного устройства от момента силы сопротивления.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости его вала от развиваемого электромагнитного момента в установившемся режиме работы, то есть о)=f(M).
Механические характеристики электродвигателя могут быть представлены и обратной функцией: М—ф(со).
Формулы механических характеристик электродвигателей выводятся аналитически. При этом проще получить зависимость электромагнитного момента от угловой скорости вала электродвигателя, так как она более точно отвечает физическому смыслу явлений, протекающих в электродвигателе.
Наряду с механической характеристикой используют зависимость тока от скорости. Эту зависимость называют электромеханической характеристикой, так же как и обратную функцию. Электромеханические характеристики (по устаревшей терминологии скоростные) отражают связь между механической и электрической величинами. Если первые характеристики используются для анализа работы электродвигателя совместно с приводимым в движение механизмом, то вторые позволяют оценить загрузку электродвигателя по току.
Вместе с тем оба указанных типа характеристик взаимосвязаны, так как величина электромагнитного момента, развиваемого электродвигателем, определяется значениями тока и магнитного потока.
У большинства двигателей с увеличением скорости уменьшается момент. Степень изменения момента электродвигателя при изменении скорости определяет коэффициент жесткости механической характеристики а, который определяется как производная момента по скорости, то есть a=dM/du.
Величину изменения момента при определении коэффициента жесткости берут в долях от номинального, то есть в относительных единицах. Угловую скорость вала электродвигателя в относительных единицах удобнее вычислять в долях от скорости идеального холостого хода его.
По величине коэффициента жесткости механические характеристики двигателей разделяют на абсолютно жесткие, жесткие и мягкие.
Абсолютно жесткой механической характеристикой обладают синхронные двигатели, у которых скорость не зависит от нагрузки.
Жесткую механическую характеристику (а=10...40) имеют асинхронные двигатели в рабочей части характеристики и двигатели постоянного тока с независимым возбуждением.
Мягкая механическая характеристика (а<10) отражает зависимость, при которой значительным изменениям скорости соответствует относительно малое изменение момента. Эти характеристики свойственны двигателям с последовательным возбуждением.
Механические характеристики разделяют на естественные и искусственные.
Характеристики, получающиеся при номинальном напряжении на зажимах двигателя, номинальном магнитном потоке, отсутствии дополнительных электрических сопротивлений в цепях электрической машины, называют естественными. Все остальные характеристики называются искусственными.
Механические характеристики электродвигателей выражают в виде формул или графиков в абсолютных или в относительных единицах.
Применение относительных единиц упрощает формулы, позволяет строить обобщенные, универсальные графики характеристик для однотипных двигателей разной мощности.
ТОРМОЗНЫЕ РЕЖИМЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
Электродвигатели в электроприводе могут быстро остановить энергетическое машинное устройство или удерживать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель работает в одном из тормозных режимов: противовключения, динамическом, рекуперативном (рис. 8.6).
Торможение электропривода посредством переключения обмоток электродвигателя для получения движения в противоположном направлении применяют тогда, когда необходимо быстро остановить машинное устройство. При этом силы инерции вращают электродвигатель в сторону, обратную развиваемому им моменту.
В асинхронном двигателе ротор вращается навстречу магнитному потоку и скольжение становится больше единицы.
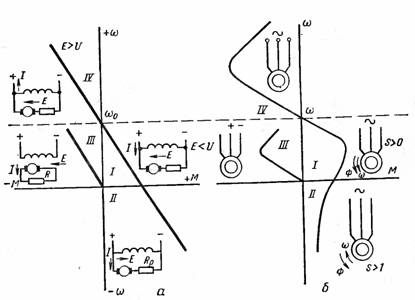
Рис. 8.6. Включение и механические характеристики электродвигателя с независимым возбуждением (о) и асинхронного (б) в режимах:
1 — двигательном; II— противовключения; /// — динамического торможения; IV — генератором с отдачей энергии в сеть.
В двигателях постоянного тока э. д. с. якоря и напряжение источника питания в отличие от двигательного режима не вычитаются, а складываются. Для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора.
Энергия торможения и поступающая из сети рассеиваются в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электрическая машина работает генераторов (динамо) с рассеиванием энергии торможения.
Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление.
В асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя. Постоянный ток создает неподвижное магнитное поле. При вращении ротора в его обмотках наводится э. д. с. и появляется ток. Взаимодействие тока ротора с неподвижным магнитным полем создает тормозной момент. Значение тормозного момента зависит от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
Динамическое торможение применяют для остановки привода. В этом случае ток изменяет направление, электрическая машина становится генератором, энергия торможения отдается в электрическую сеть.
Рекуперативное торможение используется в подъемных установках для удержания скорости при опускании грузов, для испытания под нагрузкой тракторных двигателей.