Дистанционное управление электроприводами применяется в первую очередь там, где нужно объединить территориально разобщенные объекты в единый производственный комплекс с централизованным управлением. Это обычно связывают с особенностями современных сельскохозяйственных предприятий:
строгая регламентация режимов отдельных технологических процессов по параметрам режима и времени исполнения;
большая рассредоточенность средств механизации и оборудования на территории и в помещениях комплексов;
недопустимость длительного простоя технических средств жизнеобеспечения из-за неисправности;
строгие зооветеринарные ограничения на перемещение обслуживающего персонала.
В сложных системах централизованного управления применяются различные устройства, приборы и аппараты, в том числе и электронно-вычислительные машины, при помощи которых автоматически избираются оптимальные режимы производственных механизмов. Такие системы получили название автоматизированных систем управления технологическими процессами, или сокращенно АСУТП.
В устройствах с местным управлением (рис. 13.14,а) органы управления и объекты управления соединяются проводниками, по которым протекает ток, необходимый для работы электродвигателя. При этом требуется прокладка силовой линии между органом управления (выключатель) и объектом управления, что целесообразно для сравнительно небольших расстояний.
Для устройств с дистанционным управлением характерно наличие отдельной линии связи между каждым органом управления и каждым объектом управления взамен силовой линии при местном управлении. С этой целью, например, для включения и отключения электродвигателя на объекте при дистанционном управлении вблизи объекта Об (рис. 13.14,6) устанавливается магнитный пускатель К, силовые контакты которого замыкают цепь объекта, а цепь управления катушкой магнитного пускателя соединяется с органом управления отдельной линией связи. Сигналы от объектов управления подводятся к пункту управления также отдельными проводными линиями.
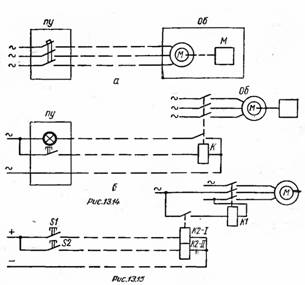
Рис. 13.14. Местное и дистанционное управление электроприводами:
а — местное управление; б — дистанционное управление магнитным пускателем.
Рис. 13.15. Дистанционное управление с механической фиксацией.
Недостатком схемы (рис. 13.14,6) является, во-первых, ограниченная дальность действия, так как обмотка магнитного пускателя включена непосредственно в линию связи; во-вторых, высокое напряжение линии связи, что обусловливает использование более дорогих марок кабеля; в-третьих, даже при кратковременном исчезновении напряжения на пункте управления (ПУ) происходит отключение всех управляемых объектов.
Этот недостаток устранен в схеме дистанционного управления магнитным пускателем, изображенной на рисунке 13.15.
В линию связи между ДП и контролируемым пунктом (КП) включаются катушки электромагнитного реле с механической блокировкой. При замыкании кнопки S1 получает питание включающая катушка реле К1. При отпускании кнопки S1 пускатель К2 остается во включенном положении благодаря защелке реле. Для отключения пускателя служит кнопка S2.

Рис. 13.16. Групповой выбор при дистанционном управлении.
Рис. 13.17. Схема дистанционного управления магнитным пускателем с использованием качественных признаков тока.
В этом случае каждая посылка приказа управления или передача извещения о состоянии управляемого объекта осуществляется по самостоятельному проводу. Общее число проводов, необходимое для передачи всего объема информации п=т+т', где т — общее число команд и извещений; т' — число обратных проводов. Довольно часто все обратные провода соединяют в один, то есть принимают т '= 1 или используют для этой цели нулевой провод силовой сети.
Групповой метод. Непосредственные способы выбора объектов управления характерны тем, что для каждого передаваемого сигнала или объекта управления на ДП устанавливают командные аппараты (кнопки, выключатели, клавиши и т. д.). Отличительной особенностью группового метода является то, что исполнительная цепь данного объекта выбирается в несколько приемов.
Например, первой командой выбирается группа объектов, второй — сам объект. Число ступеней выбора может быть различным.
На рисунке 13.16 показан двухступенчатый выбор одного из четырех объектов, размещенных в двух аналогичных помещениях.
Для этой цели на ДП устанавливают два ключа S1 и 2 для выбора помещения и четыре кнопочных выключателя S3...S6 для проведения операций «включить» и «отключить» по каждому из двух объектов независимо.
Например, для включения объекта 1, размещенного на КП1, выбирают одну из групп (первую), в каждом из которых два объекта. Для этого замыкают ключ SB2, а затем кнопку SB3, что обеспечит выбор объекта и исполнения операции (включить). Для выполнения операции «отключить» необходимо нажать кнопку SB4. Проведение операций сопровождается световой сигнализацией посредством ламп HL1 и HL2, которые также являются групповыми.
Число проводов линии связи между КП (помещениями), если она имеет цепочную структуру, определяется из следующего выражения:
m = n + q,
где q — число передаваемых сигналов; п — количество КП.
Качественный метод может быть использован для избирания объектов управления с целью сокращения проводов линии связи. Данный метод характеризуется передачей по одному и тому же проводу сигналов (импульсов тока), различающихся качественными признаками.
Рассмотрим схему управления и сигнализации для одного объекта, например магнитного пускателя (рис. 13.17). В этой схеме использованы два качественных признака — амплитудный и полярный. При включенном магнитном пускателе благодаря полярному признаку избирания образуется цепь: заземленный полюс источника питания, блок-контакт магнитного пускателя К2, отключающаяся обмотка реле К.1, диод V3, линия связи, сигнальная лампа Н, диод V2, другой полюс источника питания. Сила тока, проходящего через эту цепь, благодаря амплитудному признаку достаточна для зажигания лампы, но недостаточна для срабатывания отключающей катушки реле К1.
При нажатии кнопки S2 «откл.» лампа шунтируется, цепь замыкается только через отключающую обмотку KC-II, в которой ток возрастает и реле отключает магнитный пускатель К2.
Так как в данной схеме происходит однополупериодное выпрямление тока, то диоды V3 и V4, кроме того, устраняют вибрацию реле.
Таким образом, управление и сигнализация для одного объекта выполняются по одному прямому проводу. В схеме же рисунка 13.15 для осуществления тех же функций три прямых провода.
Применение качественного метода при групповом способе избирания также значительно сокращает количество проводов в линии связи, однако сопряжено с усложнением аппаратуры как на ДП, так и на КП.
Системы телемеханики отличаются от вышеприведенных устройств дистанционного управления тем, что все сигналы управления, сигнализации, а во многих случаях и сигналы телеизмерения передаются чаще всего по одной паре проводов линии связи благодаря распределительному принципу избирания. У них сложная структура, они дорого стоят, требуют высококвалифицированного обслуживающего персонала, и их применение оправдывается в том случае, когда расстояние между ДП и КП превышает несколько километров.
Программное управление.
Системы централизованного программного управления приводами без вмешательства диспетчера выполняют операции по заранее заданным условиям.
Примерами установок, работающих по сигналам программных устройств, размещаемых на ДП, могут служить, например, кормораздатчики и транспортеры для уборки помещений.
На рисунке 13.18 показана принципиальная схема системы централизованного программного управления транспортными механизмами для нескольких помещений. Она включает в себя программное устройство (контакты Q1...Q4), переключатели программы Sl...Sn (по числу помещений п), распределитель (контакты Е1...Еп) и исполнительные устройства (К1 ...Кп), установленные около транспортеров.
В качестве программного устройства используются реле времени типа 2РВМ с суточным циклом. Для четырех программ таким образом на ДП требуются два реле времени.
Предположим, что переключатель S1 установлен в положение «1». Тогда при замкнутом контакте Q1 в момент подачи распределителем напряжения на шинку 1 замкнется цепь: «плюс» источника питания, контакт Е1 распределителя, диод VI, переключатель S1, контакт Q1, резистор R1, управляющий электрод, катод тиристора VT1, «минус» источника питания. Тиристор VT1 открывается, благодаря чему замкнется цепь включающей катушки К1 — I, управляющей электромагнитным пускателем транспортера (на схеме не показано).
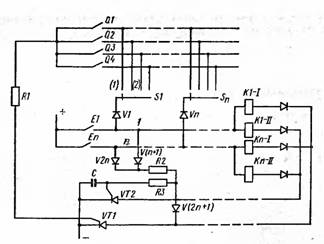
Рис. 13.18. Принципиальная электрическая схема программного дистанционного управления электроприводами.
После размыкания контакта Q1 в момент поступления положительного сигнала на шинку 1 включается тиристор VT2, так как с его цепи возбуждения снимается шунт — диод V(2п+1), анод — катод тиристора VT1, благодаря чему получит питание отключающая катушка реле К1-2.
При переводе переключателя в положение «2» число включений транспортера в сутки будет определяться уже числом срабатываний контакта Q2.
Централизованное программное управление технологическими процессами в некоторых случаях позволяет уменьшить капитальные вложения на устройства местной автоматики и улучшить надежность всей системы в целом за счет многократного использования аппаратуры ДП.
Для организации рабочего места диспетчера и размещения аппаратуры управления и контроля, а также для хранения рабочей документации промышленность изготовляет диспетчерские столы типа КЗСП.
Столы образуются из тумб и столешниц с горизонтальной поверхностью. Конструкция столов предусматривает установку над столешницей одного или двух корпусов для размещения приборов контроля и других устройств.
Тумбы предназначены для размещения в них выводных устройств, клеммников и слаботочной аппаратуры.
Верхняя панель тумбы предназначена для размещения командной аппаратуры и приборов связи. На панели приборного корпуса размещают обобщенную мнемоническую схему КП и лампы-клавиши групповой сигнализации, размещение которых приближают к топографическому расположению КП.