На свинофермах для раздачи кормов применяют стационарные и передвижные (мобильные) кормораздатчики. Выбор типа кормораздатчика зависит от способа кормления, зональных особенностей, условий содержания свиней, организации работ на ферме и других факторов.
В комплект современного технологического оборудования, предназначенного для раздачи кормов, входят кормораздатчики типа РКА-1000, обеспечивающие раздачу гранулированного комбикорма, который из внешнего бункера подается транспортерами в приемные бункера кормораздатчика. Из приемного бункера корм направляется двумя цепочно-шайбовыми транспортерами в двухсторонние лотковые кормушки или на пол.
При групповом способе содержания свиней часто используется стационарный кормораздатчик РКС-3000М, обеспечивающий равномерную раздачу сухих, сочных и полужидких (влажностью до 70 %) кормов для 3000 свиней за 20... 30 мин.
Готовый корм поступает в бункер-дозатор (рис. 15.10) с учетом разовой дачи кормов на все поголовье свиней. Отсюда корм подается на наклонный, а затем на горизонтальный (раздаточный) транспортеры. Раздаточный транспортер поочередно загружает раздатчики № 1 и 2 (платформы), совершающие возвратно-поступательное движение на расстояние, равное половине длины кормушек.
Когда платформа движется влево, на нее поступает корм. Скребки, подвешенные на шарнирах, поворачиваются вверх и не мешают продвижению платформы с кормом.
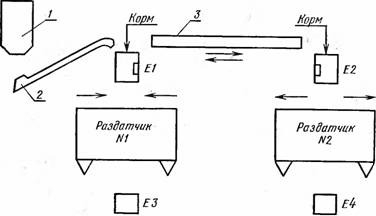
Рис. 15.10. Технологическая схема кормораздатчика РКС-3000М:
1 — бункер-дозатор; 2 — наклонный транспортер; 3 — раздаточный транспортер.

Бункер-дозатор
Рис. 15.11. Электрическая схема управления кормораздатчиком РКС-3000М.
При обратном ходе платформы скребки опускаются, задерживают корм и сбрасывают его в кормушки. В это время кормом загружается правая половина платформы.
Электрическая схема управления кормораздатчиком в автоматическом режиме показана на рисунке 15.11.
В режиме автоматического управления кормораздатчик вступает в работу по сигналу программного реле времени К9. В заданное время включается его контакт в цепи катушки магнитного пускателя К5, включающего раздаточный транспортер. Магнитный пускатель К5 подает питание на катушку магнитного пускателя КЗ, что приводит к пуску наклонного транспортера, а затем — посредством пускателя К4 и бункера-дозатора. Когда корм начнет поступать, замкнется контакт датчика уровней Е1, который включит через пускатель К1 платформу первого раздатчика.

Рис. 15.12 Электропривод кормораздатчика:
а — кинематическая схема двухлинейного кормораздатчика; б — электрическая схема управления.
Как только платформа заполнится кормом и займет крайнее положение, конечный выключатель Е3 реверсирует привод платформы, в результате чего корм сбрасывается в первую секцию кормушек. Одновременно платформа заполняется кормом для второй секции кормушек. В крайнем положении платформы конечный выключатель Е3 опять переключится, и корм заполнит вторую секцию кормушек.
Таким же способом реле времени К10 управляет вторым кормораздатчиком.
В птичниках с напольным содержанием используется комплект оборудования «Промышленный», предусматривающий автоматизацию процессов загрузки сухими и влажными кормами бункеров- раздатчиков, раздачу кормов, очистку кормушек и др.
Корм из раздатчика выгружается цепным скребковым транспортером в бункер-дозатор I (рис. 15.12,а). Отсюда он попадает в две кормушки, по дну которых движется лента 3 от бункера к противоположному концу желоба, установленного по длине птичника. Поступление корма на ленту регулируется шиберами. Нижняя часть ленты заменена тросом. На их стыке укреплен скребок, который очищает остатки корма со дна и стенок кормового желоба.
Двигатель кормораздаточных линий включается кнопкой S1 (рис. 15.12,б) или по сигналу программного реле времени КЗ, а останавливается кнопкой S2 или конечным выключателем Е1, когда корм достигает противоположного конца желоба.
Чтобы возвратить кормораздаточные ленты в исходное положение, кнопкой S3 пускают электродвигатель или он начинает работать по сигналу реле времени К4; останавливает двигатель конечный выключатель Е2.
Для автоматизации производственных процессов в птицеводстве при клеточном содержании промышленность выпускает комплекты оборудования, аппаратура которого размещается в специальных шкафах типов БЦМ (многоярусные батареи) и ОБН (одноярусные батареи).
Схема управления загрузкой кормов в раздатчики, подвешенные на роликах к верхним полкам батарей, показана на рисунке 15.13.
При нажатии пусковой кнопки S2 получает питание катушка магнитного пускателя К1, который включает электродвигатель горизонтального транспортера, загружающего последовательно раздаточные бункера всех клеточных батарей. В цепь тока вводится катушка магнитного пускателя К2, включающего наклонный транспортер, который подает на горизонтальный транспортер сухой или влажный корм (в зависимости от того, в каком положении находится переключатель S6).
В автоматическом режиме переключатель S7 включен. Когда в определенное время замыкается контакт реле времени в цепи реле К5, включаются раздатчики первой клеточной батареи. Работу раздатчика прекращает путевой выключатель Е1, расположенный в конце батареи. Одновременно получает питание реле времени К9, которое с определенной выдержкой времени включает катушку магнитного пускателя K7, реверсирующего привод раздатчика первой клеточной батареи. Раздатчик, двигаясь в обратном направлении, останавливается в исходном состоянии конечным выключателем Е2, который одновременно включает электромагнитный пускатель раздатчика следующей батареи.
Таким образом, если в зале несколько батарей, каждый раздатчик предыдущей батареи дает команду на включение последующего. Когда корм будет роздан во всех батареях, кормораздатчики отключаются в исходном положении.
Электрическая схема управления электроприводами загрузки и раздачи корма в одноярусных батареях показана на рисунке 15.14.

Рис. 15.13. Схема управления загрузкой кормов для птичников с батареями БЦМ.
В автоматическом режиме выключатели S1 и S6 ставят в положение «А», a S2...S5 — в положение «Р». В заданное время замыкается контакт реле времени К6 в цепи катушки магнитного пускателя К5 и в работу вступает горизонтальный транспортер и вибратор. Транспортер подает корм из бункера-накопителя в раздаточные бункера, установленные над раздаточными транспортерами. Горизонтальный транспортер отключается по сигналу датчика уровней Е, который установлен в последнем раздаточном бункере.
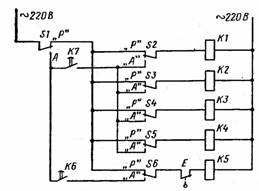
Рис. 15.14. Электрическая схема управления загрузкой и раздачей кормов в одноярусных батареях.
При замыкании контакта реле времени К7 получают питание катушки магнитных пускателей К1... К4, которые включают транспортеры, совершающие круговое движение. Длительность включения определяется установленной выдержкой времени контактов К7.