Основными требованиями, предъявляемыми к расцепителю, или чувствительному органу автоматического выключателя, являются достаточно высокая надежность и стабильность в работе. По времени срабатывания расцепители можно разделить на две группы:
- мгновенно срабатывающие, применяемые для защиты от аварийных режимов, в частности для защиты от коротких замыканий, и
- с выдержкой времени, применяемые для защиты от перегрузок и в селективных автоматах.
По принципу действия наибольшее распространение нашли электромагнитные и тепловые расцепители. Электромагнитные расцепители представляют собой обычный электромагнит, в котором катушка воспринимает контролируемую величину тока или напряжения. Возникающее при этом электромагнитное усилие притяжения сравнивается с усилием регулировочной пружины; в случае превышения заданной величины притягивающийся якорь воздействует на механизм выключателя, вызывая его срабатывание. Электромагнитные расцепители обычно являются мгновенно срабатывающими и применяются для защиты от аварийных режимов.
Конструктивно электромагнитные расцепители выполняются как с поворотным якорем клапанного типа, так и с прямоходовым якорем типа соленоида или броневого магнита. Последние находят в автоматах большее применение вследствие более удобного конструктивного вписывания в механизм автомата.
Расчет электромагнитного расцепителя практически ничем не отличается от расчета реле (см. гл. XVI). В частности, расцепитель для защиты от тока короткого замыкания рассчитывается точно так же, как реле максимального тока. Как правило, усилия механизма автомата весьма значительны, но они действуют в конце хода расцепителя и на очень незначительной величине; поэтому при работе расцепителя обычно используется запасенная кинетическая энергия якоря. Согласование тяговой и механической характеристик расцепителя в этом случае производится в соответствии с указаниями, изложенными в § 11.3, причем запас кинетической энергии целесообразно иметь возможно больший с целью более надежного и уверенного срабатывания автомата.
Тепловой расцепитель автомата обычно выполняется на базе биметаллической пластины; он является расцепителем с выдержкой времени и применяется для защиты от токовых перегрузок. Конструктивно очень часто свободный конец биметаллической пластины выполняет непосредственно функцию защелки, удерживающей механизм выключателя во включенном положении. Регулировка тока срабатывания теплового расцепителя часто осуществляется за счет изменения величины перекрытия защелки: чем больше перекрытие, тем больший прогиб биметаллической пластины требуется, т. е. срабатывание происходит либо при большем токе, либо за большее время.
Расчет теплового расцепителя сводится к определению усилия и прогиба биметаллической пластины, а также к определению времени ее нагрева. Расчет усилия и прогиба пластины проводится в соответствии с расчетными формулами и указаниями, приведенными в гл. VI; расчет времени и температуры нагрева проводится так же, как при расчете плоской шины на нагрев (см. § 4.2), при этом режим работы принимается обычно кратковременным.
Электромагнитные расцепители часто используются в качестве так называемых «независимых» расцепителей, срабатывание которых происходит при подаче сигнала на катушку расцепителя.
В этом случае роль расцепителя сводится лишь к передаче сигнала о срабатывании на механизм автомата; подобного рода расцепители используются и для дистанционного оперативного отключения автомата. Расчет независимого расцепителя аналогичен расчету промежуточного реле, так как их функции практически одинаковы.
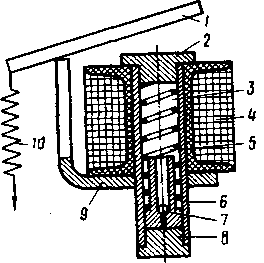
Рис. 17.2. Комбинированный расцепитель с гидравлическим демпфером
Чрезвычайно целесообразно применение комбинированных электромагнитных расцепителей, осуществляющих защиту как от токов короткого замыкания (мгновенного действия), так и от токов перегрузки (с выдержкой времени), причем оба рода защиты объединены в одной конструкции расцепителя. Создание такой конструкции возможно, так как величина тока срабатывания при коротком замыкании много больше величины тока срабатывания при перегрузках. Выдержка времени при срабатывании от тока перегрузки обычно осуществляется за счет пневматического или гидравлического (масляного) демпфера. Целесообразно применять для демпфера кремнийорганические жидкости, так как они меньше других меняют свою вязкость при изменении температуры и, следовательно, уставка расцепителя более стабильна.
Примерная конструкция такого расцепителя приведена на рис. 17.2. Расцепитель представляет собой электромагнит со стальным ярмом 9 и поворотным якорем 1 клапанного типа. Регулировка осуществляется натяжением пружины 10. Электромагнит имеет сердечник, выполненный в виде полой латунной трубки 6, заполненной демпфирующей жидкостью 3. Сверху трубка закрыта стальным полюсным наконечником 2. Внутри трубки находится подвижный стальной сердечник 8, фиксирующийся в крайнем нижнем положении возвратной пружиной 5. Подвижный сердечник снабжен обратным клапаном 7, который позволяет ему быстро опуститься вниз после срабатывания расцепителя. При токах перегрузки величина магнитного потока недостаточна для притяжения якоря 1, но подвижный сердечник 8 начинает втягиваться в катушку 4. Совершенно очевидно, что, как и в гидравлическом демпфере, это втягивание не может быть мгновенным, так как демпфирующая жидкость должна перетекать из верхней полости трубки в нижнюю через щель, образующуюся между внутренней стенкой трубки 6 и поверхностью подвижного сердечника 8. Движение сердечника будет тем быстрее, чем больше электромагнитная сила втягивания, т. е. чем больше ток катушки. По мере втягивания сердечника уменьшается воздушный зазор магнитной системы, увеличивается величина магнитного потока и, наконец, при каком-либо среднем положении подвижного сердечника якорь 1 притянется, и расцепитель сработает. Предельной величиной регулировки по току перегрузки будет такое натяжение пружины 10, когда якорь 1 притягивается лишь при полностью втянувшемся подвижном сердечнике 8 до упора, образуемого полюсным наконечником 2. Возврат сердечника 8 в исходное положение осуществляется возвратной пружиной 5. При коротком замыкании величина тока такова, что создаваемый катушкой магнитный поток достаточен для притяжения якоря 1 и без втянувшегося внутрь катушки подвижного сердечника 8. В этом случае срабатывание расцепителя происходит без выдержки времени.
Электромагнитные расцепители в автоматах на значительные мощности рекомендуется применять на постоянном токе, как более надежные. С целью уменьшения влияния вихревых токов, которые могут быть значительными при большой скорости нарастания тока короткого замыкания, магнитные системы электромагнитных расцепителей изготовляются шихтованными из электротехнической стали.
Время срабатывания расцепителя существенно влияет на величину собственного времени автоматического выключателя. Уменьшение времени срабатывания расцепителя может быть достигнуто двумя путями: путем уменьшения инерционности расцепителя, что приводит к прямому сокращению времени срабатывания расцепителя, и путем увеличения сил, приводящих в движение детали расцепителя, что, в свою очередь, приводит к увеличению скорости движения деталей и соответственно к уменьшению времени срабатывания расцепителя. Нередко в конструкции расцепителя применяют оба способа одновременно.
Уменьшение инерционности расцепителя достигается уменьшением массы подвижных частей, применением для конструкционных деталей легких сплавов, уменьшением величины перемещения подвижных деталей. В пределе при этом способе расцепитель выпол няется без подвижных частей на базе быстродействующего магни та; контролируемой величиной производится соответствующее изменение магнитного потока электромагнита, приводящее к срабатыванию автомата. Подобный расцепитель возможен в таких ав томатах, где удержание контактов во включенном состоянии осуществляется удерживающим электромагнитом. При срабатывании магнитный поток частично вытесняется в параллельную цепь, вследствие чего поток, сцепленный с удерживающей многовитковой катушкой электромагнита меняется незначительно и в ней не наводится противо- э. д. с. Детали магнитной системы, в которых происходит изменение магнитного потока, с целью повышения быстродействия выполняются шихтованными (для уменьшения вихревых токов).
На рис. 17.3 показана схема электромагнита с размагничиванием якоря. Электромагнит состоит из ярма 6 с сердечником 2, на котором находится удерживающая катушка 1, якоря 7 и магнитного шунта 4 с размагничивающей катушкой 5.
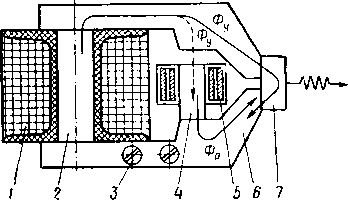
Рис. 17.3. Удерживающий электромагнит с размагничиванием якоря
Поверхности соприкосновения якоря 7 и полюсных наконечников ярма 6 пришабриваются для того, чтобы иметь небольшой магнитный поток удержания и, следовательно, обеспечить высокое быстродействие электромагнита. Магнитные потоки удерживающей катушки Фу и размагничивающей катушки Фр в якоре направлены встречно, поэтому при определенном токе размагничивающей катушки суммарный поток якоря уменьшается, и якорь отпадает. При этом поток удерживающей катушки вытесняется из якоря ή переходит в магнитный шунт 4 (направление потока Фу (на рис. 17.3 показано пунктиром), а поток размагничивающей катушки Фр вообще не сцеплен с витками удерживающей катушки. Таким образом, поток, сцепленный с многовитковой удерживающей катушкой, меняется очень незначительно и не вызывает появления противо- э.д.с. в удерживающей катушке, стремящейся препятствовать изменению потока магнитной системы. Регулировка тока срабатывания электромагнита осуществляется винтами 3 значительного диаметра; при их вворачивании и выворачивании из тела ярма меняется сечение стали данного участка, вследствие чего значительно меняется магнитное сопротивление этого участка, что в свою очередь ведет к изменению величины потока Фу удерживающей катушки.
Расчет быстродействующих расцепителей обычно очень сложен и в данной книге не рассматривается, хотя составные элементы расчета те же самые, что описаны в гл. IX и X.