Г л а в a XI
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
§ 11. 1. Принцип расчета механической характеристики и допущения при расчете
Механической характеристикой электрического аппарата называется зависимость всех механических сил или моментов, приведенных обычно к оси действия привода аппарата (к оси действия тяговой силы), от величины хода или от угла поворота привода φ, т. е. Рмех=f(l); Ммех=f(φ).
В электрических аппаратах с электромагнитным приводом за величину хода обычно принимается величина рабочего воздушного зазора магнитной системы, в аппаратах с пневматическим приводом — ход поршня привода, в аппаратах с ручным приводом — угол поворота рукоятки или педали.
В подавляющем большинстве случаев расчет ведется статический: принимается, что в любом промежуточном положении можно пренебречь силами инерции подвижных частей аппарата. Тогда под действием реальных механических сил и суммарной силы, приведенной к оси действия привода, подвижные части должны находиться в равновесии. Следовательно, основными расчетными уравнениями при построении механической характеристики будут статические уравнения равновесия механизма, а именно:
- сумма проекций всех сил на координатные оси равна нулю;
- сумма моментов всех сил относительно какой-либо точки системы (обычно берется ось вращения подвижной детали) равна нулю:
(11-1)
![]()
Таким образом, основной погрешностью расчета механической характеристики является то, что не учитываются инерционные силы подвижных частей. Однако поскольку массы и ускорения движения их обычно в электрических аппаратах невелики, то и инерционные силы не достигают значений, существенно изменяющих механическую характеристику. Довольно часто при расчете механической характеристики не учитываются силы трения и веса подвижных частей, поскольку обычно их величины на порядок ниже остальных механических сил. В том случае, если силы веса и трения соизмеримы с остальными механическими силами, то они должны быть при расчете механической характеристики учтены.
Метод расчета механической характеристики — графо-аналитический — может проводиться двумя способами.
Первый способ — графический — является наиболее общим способом расчета механической характеристики. При этом способе весь ход или угол поворота подвижных частей делится на ряд промежуточных положений, причем обязательно учитываются положения, при которых происходит скачкообразное изменение механических сил (например, касание или начало расхождения контактов). Для каждого из промежуточных положений определяются значения механических сил, их плечи и составляются уравнения равновесия, на основании которых определяется результирующая (приведенная к оси действия привода) механическая сила или момент. Необходимо заметить, что в большинстве случаев величины плеч реальных механических сил не зависят от хода или угла поворота подвижных деталей и остаются постоянными, а сами механические силы меняются по линейной зависимости от хода или угла поворота, поскольку они обычно создаются пружинами, а характеристики большинства пружин прямолинейны.
В этом случае обычно пользуются вторым способом — аналитическим — менее трудоемким и не требующим точного вычерчивания кинематики всего механизма для каждого промежуточного положения. При втором способе приводится к оси действия привода каждая отдельная механическая сила, а поскольку характеристика приведенной силы остается прямолинейной, то для ее построения достаточно рассчитать только две точки без предварительного точного вычерчивания кинематики механизма. Затем характеристики отдельных приведенных сил графически или аналитически суммируются; их сумма и будет являться механической характеристикой всего аппарата.
§ 11. 3. Согласование тяговых и механических характеристик аппаратов косвенного управления
Рассчитанные тяговая и механическая характеристики строятся для удобства сравнения в одной системе координат и в одном квадранте, несмотря на то, что знаки усилий противоположны, далее их согласовывают друг с другом для получения надежной работы аппарата.
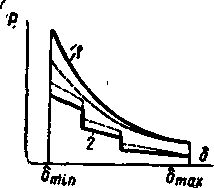
Рис. 11.9. Согласование тяговой 1 и механической 2 характеристик
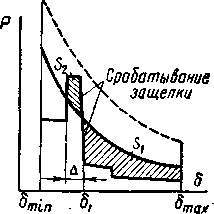
Рис. 11.10. Согласование характеристик механизма с защелкой.
Основным условием согласования характеристик является превышение тяговых усилий над механическими на всем ходе подвижных частей; т. е. тяговая характеристика 1 должна располагаться выше механической 2 (рис. 11.9). При этом необходимо, чтобы в критических точках (точки механической характеристики, наиболее близко подходящие к тяговой характеристике; обычно точки, в которых механическое усилие меняется скачком) был бы достаточный запас тягового усилия. Такой запас учитывает, что как тяговая, так и механическая характеристики являются статическими. Динамическая тяговая характеристика в действительности будет при общей начальной точке лежать несколько ниже статической за счет того, что тяговое усилие не успевает изменяться одновременно с изменением хода; динамическая механическая характеристика при общей начальной точке за счет появления при движении инерционных сил лежит несколько выше статической. Примерное положение динамических характеристик показано на рис. 11.9 пунктиром. Если вследствие недостаточности запаса тягового усилия при статических характеристиках динамические характеристики в какой-либо точке будут пересекаться, то в процессе включения в этой точке подвижные детали будут останавливаться на некоторое время, необходимое для того, чтобы тяговая и механическая силы приняли свое статическое значение; после этого процесс включения продолжается. Происходит так называемое «двоение» при включении, что весьма нежелательно. Запас статического тягового усилия над статическим механическим усилием для обеспечения надежной работы аппарата без «двоения» обычно принимается в размере 10-15% от статического механического усилия в критических точках.
В некоторых случаях встречаются механические характеристики, имеющие на небольшом ходе подвижных частей резкое увеличение противодействующих движению сил. Такие характеристики обычно имеют механизмы с защелками: резкое увеличение механических сил происходит в момент отключения защелки (рис. 11.10). Если для такого механизма производить согласование характеристик, то, за исключением весьма небольшого хода Δ, тяговая характеристика (показана на рис. 11.10 пунктиром) лежит на всех остальных участках хода много выше механической, что приводит к плохому использованию тяговой силы, низкому к.п.д. привода и большому удару в конце хода.
Как исключение, для таких характеристик допускается пересечение и превышение механическими усилиями тяговых на небольшом участке хода при его расположении в конце процесса работы (что обычно и бывает в механизмах с защелками), причем перед этим участком тяговое усилие должно иметь значительное превышение над механическим. Такая тяговая характеристика показана на рис. 11.10 сплошной линией. Достаточное превышение тягового усилия над механическим в начале хода от δтах до δ1 создает запас кинетической энергии в движущихся частях, который затем используется для преодоления участка Δ с механическим усилием, превышающим тяговое. Поскольку величина избыточной энергии или работы пропорциональна площади между тяговой и механической характеристиками, то очевидно, что для уверенной работы аппарата необходимо, чтобы площадь S1 была много больше площади S2. Более точный расчет проверки работоспособности подобного аппарата заключается в определении силы удара о защелку, которая должна быть больше, чем противодействующие механические усилия. Обычно такое допущение делается для механизмов с довольно массивными подвижными деталями и значительными тяговыми усилиями, позволяющими получить достаточно большую величину кинетической энергии.
Для автоматических аппаратов согласование характеристик проводится в основном так же, как и для неавтоматических, и отличается лишь тем, что в точке А на рис. 11.11 при зазоре δmax, где происходит автоматическое срабатывание аппарата, тяговая характеристика, рассчитанная по параметрам срабатывания, и механическая характеристика должны пересекаться.