С вопросом стабилизации частоты в судовых установках приходится встречаться при выполнении требований обеспечения постоянства частоты у отдельных приемников и получения стабильной частоты всей электрической станции. В первом случае необходимо осуществлять стабилизацию частоты того или иного преобразователя, питающего приемник; во втором — стабилизацию частоты первичного двигателя генераторного агрегата судовой электрической станции.
Стабилизатор частоты машинного преобразователя.
На рис. 2.33 приведена схема стабилизатора частоты СГ двухмашинного агрегата с приводным электрическим двигателем постоянного тока.
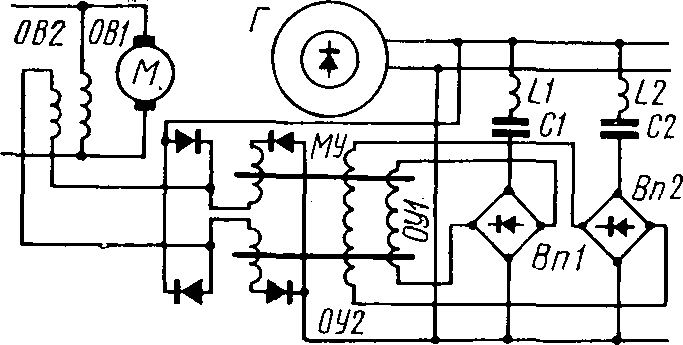
Рис. 2.33. Принципиальная схема регулятора частоты преобразователя

Рис. 2.34. Резонансные характеристики регулятора
Контроль частоты осуществляется с помощью двух резонансных контуров (xС1; хL2; хс2; хL2), получающих питание от статора СГ. Резонансные контуры настроены на разные частоты: первый контур — на меньшую, второй — на большую. В резонансные контуры через полупроводниковые выпрямители включены встречно друг другу обмотки управления (ОУ1 и ОУ2) магнитного усилителя МУ с внутренней обратной связью. Магнитный усилитель получает питание также от статора СГ и служит для управления током одной из обмоток возбуждения 0В2 приводного электродвигателя М преобразователя. Так как обмотки управления одинаковы и включены навстречу друг другу, то при некоторой частоте fн разность их намагничивающих сил (рис. 2.34) равна нулю (fOУ1—fOУ2= 0). При увеличении частоты генераторов выше fн в резонансном контуре 1 ток уменьшится, а в контуре 2 увеличится. Соответственно этому появится разность н. с. fOУ1 —fOУ2 > 0, которая, воздействуя через магнитный усилитель на обмотку ОВ2, увеличит магнитный поток электродвигателя, благодаря чему скорость агрегата снизится до величины, близкой к первоначальной. При уменьшении частоты ниже произойдет обратное явление. Ток в резонансном контуре 1 уменьшится, а в резонансном контуре 2 возрастет. Разность н. с. fOУ1—fOУ2< 0 станет меньше нуля, в результате чего уменьшится и ток в обмотке возбуждения двигателя ОВ2. Двигатель увеличит свою скорость до величины, близкой к первоначальной.
Двухимпульсный электромеханический регулятор частоты вращения приводного двигателя состоит из механического центробежного датчика частоты вращения и электрического датчика импульса мощности
с электромагнитами и гидроусилителем. На рис. 2.35, а показана функциональная, а на рис. 2.35,б электрическая схема регулятора. Электрический датчик мощности реагирует на изменение активной нагрузки и с помощью электромагнитов приводит в действие гидроусилитель ГУ1, воздействуя параллельно с центробежным регулятором на исполнительный орган — рейку топливного насоса. Для получения астатической характеристики необходимо, чтобы золотник гидравлического усилителя, на который действуют электромагниты, возвратился в исходное положение после того, как рейка топливного насоса передвинется в положение, соответствующее новой нагрузке генератора.

Рис. 2.35. Схема регулятора скорости первичного двигателя: а — функциональная; б — электрическая
Это означает, что при отклонении нагрузки в системе возникает сигнал, приводящий к отклонению золотника, и затем, после перемещения рейки в положение, соответствующее данной нагрузке, действие сигнала прекращается. В рассматриваемой системе перемещение рейки топливного насоса приводит к повороту сельсина ΤρΒ, и когда алгебраическая сумма сигналов от трансформатора тока Тр3 и от сельсина будет равна нулю, электромагнит отпустит якорь и золотник гидроусилителя возвратится в исходное положение. Э. д. с. сельсина, в зависимости от угла рассогласования, изменяется по закону е = Em sin θ.
При малых углах поворота характеристику сельсина можно принять прямолинейной, поэтому между перемещением рейки и э. д. с. сельсина сохраняется пропорциональность.
Основной частью схемы регулятора (см. рис. 2.35, б) является фазочувствительный мост, обеспечивающий подачу сигнала к электромагнитам ЭМ1 и Эм2 только при изменении активной нагрузки генератора. В самом деле, при принятой схеме, в случае наброса на генератор реактивной нагрузки, выходной ток трансформаторов Тр3 и соответственно создаваемое им на сопротивлении R падение напряжения U'Tρ1 сдвинуты относительно напряжения U'Tρ одной из выходных обмоток трансформатора Тр на угол +90° и относительно напряжения U"Tρ другой обмотки на угол —90°. При этом абсолютные значения результатирующих векторов UTP1 и UTP2 равны между собой и к первичным обмоткам трансформаторов Тр1 и Тр2 подводятся равные по величине напряжения, которые затем, трансформируясь и выпрямляясь, создают одинаковые по величине, но противоположные по знаку напряжения и U2 на зажимах сопротивления R1 и R2. При этом напряжение между точками 1 и 2, а следовательно, и на зажимах обмоток электромагнитов ЭМ.1 и Эм2 равно нулю.
Иная картина получается при набросе на генератор активной нагрузки. В этом случае имеет место алгебраическое суммирование векторов напряжения и Utp выходных обмоток трансформатора Тр с вектором падения напряжения Um на зажимах сопротивления R, благодаря чему напряжения Utp1 и UTp2 на входных обмотках трансформаторов Тр1 и Тр2 оказываются разными (см. рис. 2.35), а между точками 1 и 2 появляется напряжение Ul,2=Ux—U2, пропорциональное их разности. Приведенная система работает следующим образом: при холостом ходе генератора напряжения на выходных обмотках трансформаторов Тр1 , Тр2 равны и напряжение между точками 1 и 2 равно нулю. Электромагниты ЭМ лишены питания. При набросе на генератор активной нагрузки баланс напряжения на входных обмотках трансформаторов Тр1, Тр2 нарушается, при этом появляется напряжение такого знака, при котором срабатывает электромагнит ЭМ1, воздействующий через гидроусилители на увеличение подачи топлива. Рейка топливного насоса начинает перемещаться, вместе с ней поворачивается ротор сельсина, вводящий в цепь, питающую первичные обмотки трансформаторов Тр1, Тр2, напряжение, обратное по знаку напряжению на зажимах сопротивления R. Процесс продолжается до тех пор, пока рейка топливного насоса не займет положение, соответствующее новой нагрузке. При этом напряжение сельсина уравновесит напряжение на зажимах сопротивления R и электромагнит ЭМ1 отключится. При сбросе активной нагрузки напряжение на сопротивлении R уменьшится и напряжение сельсина, противоположное ему по фазе, окажется больше. При этом изменится соотношение напряжений на входных обмотках трансформаторов Тр1, Тр2 и знак напряжения между точками 1 и 2. Сработает электромагнит Эм2, воздействующий на систему подачи топлива в сторону его уменьшения. Рейка топливного насоса будет перемещаться в обратную сторону, а вместе с нею будет поворачиваться и ротор сельсина, уменьшая напряжение на выходе. Процесс будет продолжаться, пока золотник топливного насоса не займет положение, соответствующее новой нагрузке, при которой напряжения на зажимах сельсина и сопротивления R окажутся сбалансированными и электромагнит Эм2. отключится.
Регуляторы частоты вращения описанного типа обладают большим быстродействием и обеспечивают меньшие отклонения скорости от номинальной величины при внезапных изменениях нагрузки, быстрое ее восстановление и позволяют улучшить распределение активной нагрузки между генераторами при их параллельной работе. Большая сложность регуляторов является их недостатком.