В связи с описанными выше особенностями быстрых реакторов при анализе переходных режимов их работы необходимо принимать во внимание динамические характеристики систем контроля, регулирования, аварийной сигнализации и АЗ. Речь идет о необходимости точного учета изменения их параметров во времени, задержек в формировании управляющих сигналов, поскольку эти величины оказывают существенное влияние на отклонения характеристик реактора и ядерно-энергетической установки в целом от номинальных значений.
Измерение всех параметров реактора осуществляется датчиками, обладающими той или иной инерционностью. Наибольшей инерционностью обладают обычно датчики температуры - термопары и термометры сопротивления. В жидкометаллических контурах в целях повышения надежности принято помещать термопары, уже имеющие собственный чехол, в дополнительной технологический чехол, являющийся частью контура. В результате эффективная постоянная времени термопары достигает больших значений. Так, постоянная времени термопар в баке реактора БН-350 составляет 8-10 с, в первом контуре реактора БН-600 20-25 с. Вместе с тем в настоящее время в реакторы начинают устанавливать и малоинерционные термопары. Опыта эксплуатации таких термопар и сведений об их надежности пока недостаточно для использования их в системе АЗ реактора. Термопару чаще всего можно считать одноемкостным звеном. Поэтому при изменении температуры омывающего ее теплоносителя по линейному закону изменение во времени выходного сигнала термопары описывается выражением (88), где под т0 в данном случае следует понимать ее постоянную времени. Это выражение иллюстрируется рис. 23. Оно показывает, что запаздывание сигнала термопары относительно измеряемой ею температуры теплоносителя по времени достигает 1*13 τ0. Поэтому использование упомянутых выше термопар в технологических чехлах для формирования аварийных сигналов не позволяет достиг высокой эффективности температурного канала АЗ реактора. Для повышения быстродействия этого канала необходимо переходить на менее инерционные датчики или вводить поправки в показания термопар с помощью электронных устройств. Последний путь обещает выигрыш при любых датчиках. Обработка сигналов термопар с помощью некоторого электронного устройства необходима, поскольку выдача аварийного сигнала контактами вторичного прибора, как это делалось в прошлом на различных энергетических установках и стендах, для современных быстрых реакторов неприемлема по причине недостаточной надежности, точности, быстродействия. В задачи этого устройства, по крайней мере, должно входить сравнение показаний термопары с заданным пороговым значением и формирование при его превышении сигнала на остановку реактора. Небольшое расширение этих функций позволит вводить в измеренную температуру поправку на инерционность датчика с помощью соотношения, следующего из (79):
![]() (228)
(228)
где tизм, tист - измеренное и истинное значения температуры соответственно.
Однако соотношение (228) непосредственно применять для корректировки показаний термопар чаще всего нельзя, особенно если это откорректированное значение температуры используется далее для формирования сигнала АЗ. Сигналы термопар, расположенных за обогреваемыми участками, обычно сильно флуктуируют - ’’шумят”.
Эти флуктуации обусловлены случайными отклонениями параметров тепло· и массообмена на указанных участках. На рис. 45 построена плотность распределения температуры натрия в баке реактора БН-600. По оси абсцисс отложено значение температуры, отсчитанное от среднего значения, а по оси ординат - вероятность попадания температуры в тот или иной температурный интервал, отнесенная к его ширине, при достаточно длительной регистрации температуры. График показывает, что сигнал термопары ’’шумит” в диапазоне ± 8,5 °C. Этот шум может существенно усиливаться после корректировки показаний термопар по (228). Кроме того, такая корректировка усиливает и электрические помехи, проникающие в сигналы термопар. Поэтому в (228) поправка т0dtизм/dτ пропускается через фильтр, ограничивающий перечисленные случайные добавки:
![]() (229)
(229)
Постоянная времени фильтра τф, конечно, должна быть меньше постоянной времени датчика. В результате максимальное запаздывание, которое может возникнуть в цепи измерения температуры, снижается до τф. Соответственно повышается быстродействие систем, использующих эту температуру.

Рис. 45. Плотность распределения температуры натрия в баке реактора БК-600
Расход теплоносителя в жидкометаллических контурах измеряется с помощью электромагнитных расходомеров. Инерционность этих расходомеров даже при диаметрах трубопроводов 500-800 мм незначительна. По оценкам она не превышает 0,1-0,2 с. Это значительно меньше характерных времен изменения расходов теплоносителя в контурах быстрого реактора. Поэтому динамическая погрешность показаний собственно расходомеров несущественна. Однако сигналы расходомеров также могут сильно флуктуировать из-за возмущений поля скоростей теплоносителя различными препятствиями в потоке. Полоса шумов может составлять от нескольких процентов до десятков процентов среднего значения расхода. Большие шумы сигнала создают трудности использования расходомеров в системах автоматического регулирования и АЗ Действенным средством уменьшения этих флуктуаций, как и для температурных датчиков, является фильтрация. Важно, чтобы фильтрация, достаточная для стабилизации выходного сигнала, не создавала недопустимо большого запаздывания в срабатывании, например, АЗ по расходу теплоносителя. Для выяснения этих обстоятельств в каждом конкретном случае требуются специальные исследования. В большинстве случаев шумы сигналов электромагнитных расходомеров обладают сравнительно высокой частотой. Для уменьшения их доли в выходном сигнале до требуемого значения обычно достаточно фильтров с постоянной времени 0,5-1 с.
В реакторах с интегральной компоновкой первого контура для измерения расхода натрия в этом контуре применяются расходомеры на байпасе небольшого диаметра (40-50 мм), включенном параллельно активной зоне. В широком диапазоне расход натрия через этот трубопровод с высокой точностью пропорционален расходу натрия через активную зону и реактор в целом.
Часто возникает вопрос, а не обладает ли такая измерительная система большой инерционностью при значительной протяженности (15-20 м) байпасного трубопровода. Для ответа на этот вопрос можно воспользоваться результатами, полученными в § 5. При мгновенном падении до нуля расхода натрия через реактор расход натрия через байпас снижается по гиперболе. Постоянная времени гиперболы, т.е. время уменьшения расхода через байпас в 2 раза, определяемое по (180), составляет 0,1-0,2 с. Мгновенное падение расхода натрия через реактор невозможно, но этот пример показывает, с каким запаздыванием расход через байпас реагирует на изменение расхода через реактор. Как видим, это запаздывание невелико.
Для измерения мощности реактора используют ионизационную камеру. Ее сигнал пропорционален потоку нейтронов в месте установки камеры и, следовательно, главной компоненте мощности реактора, обусловленной делением ядер топлива в данный момент времени. Вторая компонента мощности, медленно изменяющаяся в процессе работы реактора и достигающая в пределе 6,5-7 % в полной его мощности, связана с распадом продуктов деления и компенсированной ионизационной камерой не регистрируется. Это необходимо учитывать в некоторых случаях. Инерционность измерительной цепи, включающей в себя ионизационную камеру, незначительна. Однако в этой цепи, предназначенной для изменения малых токов (10-6-10-4 А), могут возникать большие помехи. Помехи эти обычно высокочастотные, поэтому фильтр с постоянной времени 0,1-0,2 с чаще всего достаточен для радикального их подавления Поэтому динамическая погрешность измерения мощности реактора невелика.
Период реактора также измеряется с помощью ионизационной камеры. Ее сигнал пропускается через логарифмирующее устройство, а затем дифференцируется. В результате получают величину, обратно пропорциональную периоду:
![]() (230)
(230)
Однако в такой форме результаты вычислений не могут использоваться в системе АЗ. При таком алгоритме возможны значительные ошибочные отклонения периода из-за помех в измерительной цепи, а на низких уровнях мощности - из-за статистических флуктуаций нейтронного потока и, следовательно, тока ионизационной камеры. Эта опасность устраняется фильтрацией. В цепи периодомера обычно используется двойная фильтрация, т.е. цепочка из двух последовательных одноемкостных фильтров. Канал АЗ по периоду в основном предназначается для использования на низких уровнях мощности, где велики флуктуации нейтронного потока из-за статистической природы деления. Постоянные времени фильтров выбираются достаточно большими - около 10 с. Поэтому при разгоне реактора сигнал на выходе периодомера со значительным запаздыванием отражает фактический период.
Рассмотрим изменение сигнала на выходе из описанного периодомера после различных скачков реактивности. Для простоты при описании зависимости мощности реактора от времени после скачков реактивности воспользуемся приближенным соотношением (5).
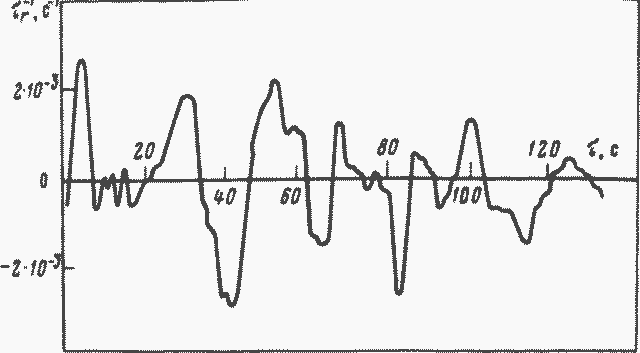
Рис. 47. Изменение во времени величины, обратной периоду, в стационаром режиме работы реактора
Статистические флуктуации нейтронного потока на высоких уровнях мощности незначительны. Помехи, которые могут возникать в цепи измерения тока ионизационной камеры, как уже говорилось, для своего подавления не требуют низкочастотных фильтров. Случайные же флуктуации периода в стационарном режиме работы реактора, связанные с шумом входных его параметров, далеки от опасных значений. На рис. 47 показано изменение во времени величины, обратной периоду, для реактора БН-350 в стационарном режиме работы. Минимальное значение периода составляет при этом 400 с.
Для формирования сигналов АЗ используются также такие технологические параметры, как уровень теплоносителя в реакторе, скорость вращения циркуляционных насосов первого контура, напряжение электропитания на двигателях насосов. Динамические характеристики уровнемеров, тахогенераторов (для измерения уровня, скорости вращения насосов) обычно вполне достаточны для обеспечения нужного быстродействия АЗ. При измерении электрического напряжения на двигателях циркуляционных насосов в режимах нарушения энергоснабжения необходимо учитывать напряжение, создаваемое двигателями выбегающих насосов и других агрегатов, подключенных к тем же источникам. Аварийный сигнал по напряжению должен выдаваться с выдержкой времени на случай восстановления энергопитания после кратковременного его перерыва. Напряжение, создаваемое выбегающими двигателями, может помешать правильному определению этого перерыва.
Запаздывание БАЗ после фактического отклонения сигнализирующего параметра до заданного значения возникает не только из-за инерционности датчиков, но и вследствие конечного времени срабатывания логических устройств, задержек в размыкании электромагнитов аварийных стержней.

Рис. 48. Изменение положения стержня АЗ при сбросе его в активную зону реактора с разной высоты цепи питания электромагнитов, остаточной намагниченности могут достигать 0,2-0,3 с. Все эти дополнительные компоненты запаздывания БАЗ необходимо учитывать при анализе переходных процессов. Они оказывают существенное влияние на отклонения температур в активной зоне реактора в наиболее тяжелых аварийных ситуациях.
Когда, наконец, происходит размыкание электромагнитов стержней АЗ, начинается ввод их в активную зону. Ввод аварийных стержней в активную зону осуществляется под действием силы тяжести и с помощью разгоняющих и амортизирующих пружин. Полное время ввода стержней в активную зону при движении их в натрии составляет около 1 с. На рис. 48 представлена зависимость перемещений аварийны^ стержней от времени при сбросе их в активную зону реактора с разной высоты.
Если отклонения параметров реактора невелики и не вызывают срабатывания АЗ, поддержание заданного режима его работы осуществляется с помощью системы автоматического регулирования. На АЭС с быстрыми реакторами с помощью автоматических регуляторов обычно поддерживаются: мощность реактора, температура теплоносителя на выходе из реактора, температура натрия и пара на выходе из прямоточных ПГ, уровень воды в ПГ с естественной циркуляцией, давление пара перед турбиной или в ПГ, давление питательной воды, скорости вращения турбины и циркуляционных насосов первого и второго контуров.